This is a modern-English version of The Fourth Dimension, originally written by Hinton, Charles Howard.
It has been thoroughly updated, including changes to sentence structure, words, spelling,
and grammar—to ensure clarity for contemporary readers, while preserving the original spirit and nuance. If
you click on a paragraph, you will see the original text that we modified, and you can toggle between the two versions.
Scroll to the bottom of this page and you will find a free ePUB download link for this book.
Transcriber’s Notes
Obvious typographical errors have been silently corrected. All other spelling and punctuation remains unchanged.
Obvious typos have been fixed without note. All other spelling and punctuation stays the same.
The cover was prepared by the transcriber and is placed in the public domain.
The cover was created by the transcriber and is available in the public domain.
SOME OPINIONS OF THE PRESS
“Mr. C. H. Hinton discusses the subject of the higher dimensionality of space, his aim being to avoid mathematical subtleties and technicalities, and thus enable his argument to be followed by readers who are not sufficiently conversant with mathematics to follow these processes of reasoning.”—Notts Guardian.
Mr. C. H. Hinton talks about the concept of higher dimensionality in space, intending to steer clear of complex math and technical details, making it easier for readers who may not be well-versed in mathematics to grasp his argument.—Nottingham Guardian.
“The fourth dimension is a subject which has had a great fascination for many teachers, and though one cannot pretend to have quite grasped Mr. Hinton’s conceptions and arguments, yet it must be admitted that he reveals the elusive idea in quite a fascinating light. Quite apart from the main thesis of the book many chapters are of great independent interest. Altogether an interesting, clever and ingenious book.”—Dundee Courier.
The fourth dimension is a topic that has intrigued many educators, and while it's difficult to fully understand Mr. Hinton’s ideas and arguments, it's undeniable that he presents this complex concept in a captivating way. Beyond the main argument of the book, several chapters hold significant independent value. Overall, it's an engaging, smart, and inventive book.—Dundee Courier News.
“The book will well repay the study of men who like to exercise their wits upon the problems of abstract thought.”—Scotsman.
The book will definitely reward those who enjoy challenging their minds with abstract thinking.—Scottish person.
“Professor Hinton has done well to attempt a treatise of moderate size, which shall at once be clear in method and free from technicalities of the schools.”—Pall Mall Gazette.
“Professor Hinton has done a great job creating a reasonably sized work that is both clear in its approach and free of complex jargon used in academic circles.”—Pall Mall Gazette.
“A very interesting book he has made of it.”—Publishers’ Circular.
A very interesting book he has created.”—Publishers' Newsletter.
“Mr. Hinton tries to explain the theory of the fourth dimension so that the ordinary reasoning mind can get a grasp of what metaphysical mathematicians mean by it. If he is not altogether successful it is not from want of clearness on his part, but because the whole theory comes as such an absolute shock to all one’s preconceived ideas.”—Bristol Times.
Mr. Hinton attempts to explain the concept of the fourth dimension in a way that everyday reasoning minds can understand what metaphysical mathematicians are talking about. If he doesn't entirely succeed, it's not due to a lack of clarity on his part, but because the entire theory is such a complete shock to all of our preconceived notions.—Bristol News.
“Mr. Hinton’s enthusiasm is only the result of an exhaustive study, which has enabled him to set his subject before the reader with far more than the amount of lucidity to which it is accustomed.”—Pall Mall Gazette.
Mr. Hinton's enthusiasm comes from extensive research, which has allowed him to present his topic to the reader with much greater clarity than usual.—Pall Mall Gazette.
“The book throughout is a very solid piece of reasoning in the domain of higher mathematics.”—Glasgow Herald.
“The book is consistently a strong piece of reasoning in the field of advanced mathematics.”—Glasgow Herald.
“Those who wish to grasp the meaning of this somewhat difficult subject would do well to read The Fourth Dimension. No mathematical knowledge is demanded of the reader, and any one, who is not afraid of a little hard thinking, should be able to follow the argument.”—Light.
Anyone looking to understand this somewhat tough topic should read The Fourth Dimension. No math knowledge is required, and anyone who isn’t afraid of doing a bit of hard thinking should be able to follow along.”—Light.
“A splendidly clear re-statement of the old problem of the fourth dimension. All who are interested in this subject will find the work not only fascinating, but lucid, it being written in a style easily understandable. The illustrations make still more clear the letterpress, and the whole is most admirably adapted to the requirements of the novice or the student.”—Two Worlds.
A wonderfully clear restatement of the classic problem of the fourth dimension. Everyone interested in this topic will find the work not only captivating but also easy to understand, thanks to the clear writing style. The illustrations further clarify the text, and the entire piece is excellently suited for beginners or students.”—Two Worlds.
“Those in search of mental gymnastics will find abundance of exercise in Mr. C. H. Hinton’s Fourth Dimension.”—Westminster Review.
“Anyone looking for a workout for their brain will find plenty of exercises in Mr. C. H. Hinton’s Fourth Dimension.”—Westminster Review.
First Edition, April 1904; Second Edition, May 1906.
First Edition, April 1904; Second Edition, May 1906.

THE
FOURTH DIMENSION
BY
BY
C. HOWARD HINTON, M.A.
AUTHOR OF “SCIENTIFIC ROMANCES”
“A NEW ERA OF THOUGHT,” ETC., ETC.
C. HOWARD HINTON, M.A.
AUTHOR OF “SCIENTIFIC ROMANCES”
“A NEW ERA OF THOUGHT,” ETC., ETC.

LONDON
SWAN SONNENSCHEIN & CO., LIMITED
25 HIGH STREET, BLOOMSBURY
1906
LONDON
SWAN SONNENSCHEIN & CO., LIMITED
25 HIGH STREET, BLOOMSBURY
1906
PRINTED BY
HAZELL, WATSON AND VINEY, LD.,
LONDON AND AYLESBURY.
PRINTED BY
HAZELL, WATSON AND VINEY, LTD.,
LONDON AND AYLESBURY.
[Pg v]
[Pg v]
PREFACE
I have endeavoured to present the subject of the higher dimensionality of space in a clear manner, devoid of mathematical subtleties and technicalities. In order to engage the interest of the reader, I have in the earlier chapters dwelt on the perspective the hypothesis of a fourth dimension opens, and have treated of the many connections there are between this hypothesis and the ordinary topics of our thoughts.
I’ve tried to explain the topic of higher dimensions in space clearly, without getting bogged down in complicated math and technical details. To capture the reader’s interest, I focused on the insights that the idea of a fourth dimension offers in the earlier chapters, and I discussed the many links between this idea and the everyday topics we think about.
A lack of mathematical knowledge will prove of no disadvantage to the reader, for I have used no mathematical processes of reasoning. I have taken the view that the space which we ordinarily think of, the space of real things (which I would call permeable matter), is different from the space treated of by mathematics. Mathematics will tell us a great deal about space, just as the atomic theory will tell us a great deal about the chemical combinations of bodies. But after all, a theory is not precisely equivalent to the subject with regard to which it is held. There is an opening, therefore, from the side of our ordinary space perceptions for a simple, altogether rational, mechanical, and observational way[Pg vi] of treating this subject of higher space, and of this opportunity I have availed myself.
A lack of math knowledge won't be a problem for the reader because I haven't used any mathematical reasoning. I've taken the perspective that the space we usually think about, which I would refer to as "permeable matter," is different from the space discussed in mathematics. Math can teach us a lot about space, similar to how atomic theory can explain many aspects of chemical combinations. However, a theory isn't exactly the same as the subject it relates to. Therefore, there's an opportunity, based on our everyday perceptions of space, for a straightforward, completely rational, mechanical, and observational approach to the topic of higher space, and I've taken advantage of that.
The details introduced in the earlier chapters, especially in Chapters VIII., IX., X., may perhaps be found wearisome. They are of no essential importance in the main line of argument, and if left till Chapters XI. and XII. have been read, will be found to afford interesting and obvious illustrations of the properties discussed in the later chapters.
The details mentioned in the earlier chapters, particularly in Chapters VIII, IX, and X, might seem tedious. They aren't crucial to the main argument, and if you wait until after reading Chapters XI and XII, you'll see they provide interesting and clear examples of the concepts discussed in the later chapters.
My thanks are due to the friends who have assisted me in designing and preparing the modifications of my previous models, and in no small degree to the publisher of this volume, Mr. Sonnenschein, to whose unique appreciation of the line of thought of this, as of my former essays, their publication is owing. By the provision of a coloured plate, in addition to the other illustrations, he has added greatly to the convenience of the reader.
I want to thank the friends who helped me design and prepare the updates to my earlier models, and especially Mr. Sonnenschein, the publisher of this book, whose special understanding of the ideas in this and my earlier writings made their publication possible. By including a colored plate along with the other illustrations, he has greatly enhanced the reader's experience.
C. Howard Hinton.
C. Howard Hinton.
[Pg vii]
[Pg vii]
CONTENTS
| CHAP. | PAGE | |
| I. | 4D Space | 1 |
| II. | The Analogy of a Flat World | 6 |
| III. | The Importance of Living in Four Dimensions | 15 |
| IV. | The First Chapter in the History of Four Space | 23 |
| V. | The Second Chapter in the History of Four Space | 41 |
| Lobatchewsky, Bolyai, and Gauss Metageometry |
||
| VI. | The Higher Realm | 61 |
| VII. | The Proof of a Fourth Dimension | 76 |
| VIII. | The Use of Four Dimensions in Thinking | 85 |
| IX. | Applying Kant’s Theory of Experience | 107 |
| X. | A 4D Shape | 122 |
| XI. | Naming and Comparisons | 136[Pg viii] |
| XII. | The Easiest 4D Shape | 157 |
| XIII. | Comments on the Figures | 178 |
| XIV. | A Summary and Expansion of the Physical Argument | 203 |
| APPENDIX I.—The Models | 231 | |
| APPENDIX II.—A Language of Space | 248 | |
[Pg 1]
[Pg 1]
THE FOURTH DIMENSION
THE 4TH DIMENSION
CHAPTER I
FOUR-DIMENSIONAL SPACE
There is nothing more indefinite, and at the same time more real, than that which we indicate when we speak of the “higher.” In our social life we see it evidenced in a greater complexity of relations. But this complexity is not all. There is, at the same time, a contact with, an apprehension of, something more fundamental, more real.
There’s nothing more vague, yet at the same time more genuine, than what we refer to when we talk about the “higher.” In our social lives, we see this reflected in a more complex web of relationships. But that complexity isn’t the whole story. At the same time, there’s a connection to, and an understanding of, something more essential, more real.
With the greater development of man there comes a consciousness of something more than all the forms in which it shows itself. There is a readiness to give up all the visible and tangible for the sake of those principles and values of which the visible and tangible are the representation. The physical life of civilised man and of a mere savage are practically the same, but the civilised man has discovered a depth in his existence, which makes him feel that that which appears all to the savage is a mere externality and appurtenage to his true being.
As humans evolve, they become aware of something beyond all the forms that express it. There is a willingness to let go of everything visible and tangible for the sake of the principles and values that those things represent. The physical lives of civilized people and those of a mere savage are essentially the same, but the civilized person has uncovered a deeper meaning in their existence, leading them to see that what seems everything to the savage is simply an external aspect of their true self.
Now, this higher—how shall we apprehend it? It is generally embraced by our religious faculties, by our idealising tendency. But the higher existence has two sides. It has a being as well as qualities. And in trying[Pg 2] to realise it through our emotions we are always taking the subjective view. Our attention is always fixed on what we feel, what we think. Is there any way of apprehending the higher after the purely objective method of a natural science? I think that there is.
Now, how do we understand this higher existence? It's often embraced by our religious feelings and our tendency to idealize. But the higher existence has two aspects. It has an essence as well as qualities. When we try to grasp it through our emotions, we're always looking at it from a subjective standpoint. Our focus is always on what we feel and think. Is there a way to grasp the higher using the purely objective approach of natural science? I believe there is. [Pg 2]
Plato, in a wonderful allegory, speaks of some men living in such a condition that they were practically reduced to be the denizens of a shadow world. They were chained, and perceived but the shadows of themselves and all real objects projected on a wall, towards which their faces were turned. All movements to them were but movements on the surface, all shapes but the shapes of outlines with no substantiality.
Plato, in a brilliant allegory, describes men living in a condition where they were essentially reduced to being inhabitants of a shadow world. They were chained and could only see the shadows of themselves and all real objects projected on a wall in front of them. For them, all movements were just surface movements, and all shapes were merely outlines without any substance.
Plato uses this illustration to portray the relation between true being and the illusions of the sense world. He says that just as a man liberated from his chains could learn and discover that the world was solid and real, and could go back and tell his bound companions of this greater higher reality, so the philosopher who has been liberated, who has gone into the thought of the ideal world, into the world of ideas greater and more real than the things of sense, can come and tell his fellow men of that which is more true than the visible sun—more noble than Athens, the visible state.
Plato uses this example to illustrate the relationship between true existence and the illusions of the sensory world. He explains that just as a man freed from his chains can learn and realize that the world is solid and real, and can return to share this greater, higher reality with his imprisoned friends, the philosopher who has been liberated and has ventured into the realm of the ideal world—into ideas that are greater and more real than sensory objects—can come back and inform others about what is truer than the visible sun and more significant than Athens, the physical city.
Now, I take Plato’s suggestion; but literally, not metaphorically. He imagines a world which is lower than this world, in that shadow figures and shadow motions are its constituents; and to it he contrasts the real world. As the real world is to this shadow world, so is the higher world to our world. I accept his analogy. As our world in three dimensions is to a shadow or plane world, so is the higher world to our three-dimensional world. That is, the higher world is four-dimensional; the higher being is, so far as its existence is concerned apart from its qualities, to be sought through the conception of an actual[Pg 3] existence spatially higher than that which we realise with our senses.
Now, I take Plato’s suggestion literally, not metaphorically. He envisions a world that is beneath our world, made up of shadow figures and shadow movements, and he compares it to the real world. Just as the real world relates to this shadow world, the higher world relates to our world. I accept his analogy. Our three-dimensional world is to a shadow or flat world what the higher world is to our three-dimensional world. In other words, the higher world is four-dimensional; the higher being, in terms of its existence apart from its qualities, is to be understood as an actual existence that is spatially higher than what we perceive with our senses.[Pg 3]
Here you will observe I necessarily leave out all that gives its charm and interest to Plato’s writings. All those conceptions of the beautiful and good which live immortally in his pages.
Here you will see I have to omit everything that adds charm and interest to Plato’s writings. All those ideas of beauty and goodness that live on forever in his texts.
All that I keep from his great storehouse of wealth is this one thing simply—a world spatially higher than this world, a world which can only be approached through the stocks and stones of it, a world which must be apprehended laboriously, patiently, through the material things of it, the shapes, the movements, the figures of it.
All I take from his vast wealth is just this one thing—another world that's beyond this one, a world that can only be reached through the materials of this world, a world that must be understood slowly and carefully, through its tangible things, its shapes, its movements, and its figures.
We must learn to realise the shapes of objects in this world of the higher man; we must become familiar with the movements that objects make in his world, so that we can learn something about his daily experience, his thoughts of material objects, his machinery.
We need to understand the shapes of objects in this world of the higher man; we must get to know the movements that objects make in his world, so we can learn something about his daily experiences, his thoughts on material objects, and his machinery.
The means for the prosecution of this enquiry are given in the conception of space itself.
The methods for carrying out this inquiry are found in the very idea of space itself.
It often happens that that which we consider to be unique and unrelated gives us, within itself, those relations by means of which we are able to see it as related to others, determining and determined by them.
It often happens that what we think of as unique and separate actually contains connections that allow us to see it as related to others, shaping and being shaped by them.
Thus, on the earth is given that phenomenon of weight by means of which Newton brought the earth into its true relation to the sun and other planets. Our terrestrial globe was determined in regard to other bodies of the solar system by means of a relation which subsisted on the earth itself.
Thus, on earth, we experience the phenomenon of weight, which allowed Newton to establish the true relationship between the earth, the sun, and other planets. Our planet's position in relation to the other bodies of the solar system was determined based on a connection that existed right here on earth.
And so space itself bears within it relations of which we can determine it as related to other space. For within space are given the conceptions of point and line, line and plane, which really involve the relation of space to a higher space.
And so space itself contains relationships that allow us to relate it to other spaces. Within space, we understand the concepts of point and line, and line and plane, which actually involve the connection of space to a higher dimension of space.
Where one segment of a straight line leaves off and[Pg 4] another begins is a point, and the straight line itself can be generated by the motion of the point.
Where one part of a straight line ends and another begins is a point, and the straight line itself can be created by the movement of that point.[Pg 4]
One portion of a plane is bounded from another by a straight line, and the plane itself can be generated by the straight line moving in a direction not contained in itself.
One part of a plane is separated from another by a straight line, and the plane itself can be formed by the straight line moving in a direction that isn’t part of itself.
Again, two portions of solid space are limited with regard to each other by a plane; and the plane, moving in a direction not contained in itself, can generate solid space.
Again, two solid volumes are restricted in relation to each other by a plane; and the plane, moving in a direction not found within itself, can create solid space.
Thus, going on, we may say that space is that which limits two portions of higher space from each other, and that our space will generate the higher space by moving in a direction not contained in itself.
Thus, moving forward, we can say that space is what separates two areas of higher space from one another, and that our space will create higher space by moving in a direction that isn't included within itself.
Another indication of the nature of four-dimensional space can be gained by considering the problem of the arrangement of objects.
Another indication of what four-dimensional space is like can be gained by looking at how objects are arranged.
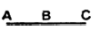
If I have a number of swords of varying degrees of brightness, I can represent them in respect of this quality by points arranged along a straight line.
If I have several swords with different levels of brightness, I can represent them based on this quality with points lined up along a straight line.

If I place a sword at A, fig. 1, and regard it as having a certain brightness, then the other swords can be arranged in a series along the line, as at A, B, C, etc., according to their degrees of brightness.
If I put a sword at A, fig. 1, and see it as having a certain brightness, then the other swords can be lined up in a sequence along the line, like at A, B, C, etc., based on their brightness levels.
If now I take account of another quality, say length, they can be arranged in a plane. Starting from A, B, C, I can find points to represent different degrees of length along such lines as AF, BD, CE, drawn from A and B and C. Points on these lines represent different degrees of length with the same degree of brightness. Thus the whole plane is occupied by points representing all conceivable varieties of brightness and length.
If I consider another quality, like length, they can be arranged in a plane. Starting from A, B, and C, I can find points to represent different degrees of length along the lines AF, BD, and CE, which are drawn from A, B, and C. Points on these lines represent different degrees of length with the same level of brightness. So the entire plane is filled with points representing every possible combination of brightness and length.
[Pg 5]
[Pg 5]

Bringing in a third quality, say sharpness, I can draw, as in fig. 3, any number of upright lines. Let distances along these upright lines represent degrees of sharpness, thus the points F and G will represent swords of certain definite degrees of the three qualities mentioned, and the whole of space will serve to represent all conceivable degrees of these three qualities.
Bringing in a third quality, like sharpness, I can draw, as in fig. 3, any number of vertical lines. Let the distances along these vertical lines represent levels of sharpness, so the points F and G will represent swords with specific degrees of the three qualities mentioned, and all of space will represent every possible degree of these three qualities.
If now I bring in a fourth quality, such as weight, and try to find a means of representing it as I did the other three qualities, I find a difficulty. Every point in space is taken up by some conceivable combination of the three qualities already taken.
If I now introduce a fourth quality, like weight, and try to find a way to represent it like the other three qualities, I encounter a challenge. Every point in space is occupied by some possible combination of the three qualities I've already considered.
To represent four qualities in the same way as that in which I have represented three, I should need another dimension of space.
To represent four qualities the same way I've represented three, I would need an additional dimension of space.
Thus we may indicate the nature of four-dimensional space by saying that it is a kind of space which would give positions representative of four qualities, as three-dimensional space gives positions representative of three qualities.
Thus we can describe four-dimensional space as a type of space that represents positions based on four qualities, just as three-dimensional space represents positions based on three qualities.
[Pg 6]
[Pg 6]
CHAPTER II
THE ANALOGY OF A PLANE WORLD
At the risk of some prolixity I will go fully into the experience of a hypothetical creature confined to motion on a plane surface. By so doing I shall obtain an analogy which will serve in our subsequent enquiries, because the change in our conception, which we make in passing from the shapes and motions in two dimensions to those in three, affords a pattern by which we can pass on still further to the conception of an existence in four-dimensional space.
At the risk of being a bit wordy, I will fully explore the experience of a hypothetical being limited to movement on a flat surface. By doing this, I will gain an analogy that will help in our later discussions, because the shift in our understanding, as we move from shapes and movements in two dimensions to those in three, provides a framework that we can use to extend our understanding to the idea of existence in four-dimensional space.
A piece of paper on a smooth table affords a ready image of a two-dimensional existence. If we suppose the being represented by the piece of paper to have no knowledge of the thickness by which he projects above the surface of the table, it is obvious that he can have no knowledge of objects of a similar description, except by the contact with their edges. His body and the objects in his world have a thickness of which however, he has no consciousness. Since the direction stretching up from the table is unknown to him he will think of the objects of his world as extending in two dimensions only. Figures are to him completely bounded by their lines, just as solid objects are to us by their surfaces. He cannot conceive of approaching the centre of a circle, except by breaking through the circumference, for the circumference encloses the centre in the directions in which motion is possible to[Pg 7] him. The plane surface over which he slips and with which he is always in contact will be unknown to him; there are no differences by which he can recognise its existence.
A piece of paper on a smooth table gives a clear image of a two-dimensional existence. If we assume the being represented by the piece of paper has no awareness of the thickness of his existence above the table's surface, it's clear he wouldn't understand objects like him, except through contact with their edges. His body and the objects in his world have a thickness that he isn’t aware of. Since the direction rising from the table is unknown to him, he will perceive the objects in his world as only extending in two dimensions. To him, figures are completely defined by their lines, just as solid objects are defined for us by their surfaces. He can’t imagine moving toward the center of a circle without breaking through the edge, because the edge confines the center in the directions he can move. The flat surface he moves across and is always touching will be a mystery to him; there are no differences he can use to recognize its existence.
But for the purposes of our analogy this representation is deficient.
But for our analogy, this representation is lacking.
A being as thus described has nothing about him to push off from, the surface over which he slips affords no means by which he can move in one direction rather than another. Placed on a surface over which he slips freely, he is in a condition analogous to that in which we should be if we were suspended free in space. There is nothing which he can push off from in any direction known to him.
A being like this has nothing to push against; the surface he slides over doesn't provide any way for him to move in one direction instead of another. When placed on a surface that allows him to slide freely, he's in a situation similar to what we would experience if we were floating freely in space. There's nothing he can push against in any direction he understands.
Let us therefore modify our representation. Let us suppose a vertical plane against which particles of thin matter slip, never leaving the surface. Let these particles possess an attractive force and cohere together into a disk; this disk will represent the globe of a plane being. He must be conceived as existing on the rim.
Let’s change our description. Let’s imagine a vertical plane where tiny particles slide, never leaving the surface. Let these particles have an attractive force and stick together to form a disk; this disk will represent the surface of a flat being. We should think of it as existing on the edge.

Let 1 represent this vertical disk of flat matter and 2 the plane being on it, standing upon its rim as we stand on the surface of our earth. The direction of the attractive force of his matter will give the creature a knowledge of up and down, determining for him one direction in his plane space. Also, since he can move along the surface of his earth, he will have the sense of a direction parallel to its surface, which we may call forwards and backwards.
Let 1 represent this vertical disk of flat matter and 2 the plane on it, standing on its edge like we stand on the surface of our Earth. The direction of the attractive force of this matter will give the creature a sense of up and down, defining one direction in its flat space. Also, since it can move along the surface of its Earth, it will have a sense of direction parallel to the surface, which we can refer to as forwards and backwards.
He will have no sense of right and left—that is, of the direction which we recognise as extending out from the plane to our right and left.
He won’t have any sense of right and left—that is, of the direction we recognize as extending out from the plane to our right and left.
The distinction of right and left is the one that we must suppose to be absent, in order to project ourselves into the condition of a plane being.
The difference between right and left is something we need to imagine as being missing so we can envision what it's like to be a flat being.
[Pg 8]
[Pg 8]
Let the reader imagine himself, as he looks along the plane, fig. 4, to become more and more identified with the thin body on it, till he finally looks along parallel to the surface of the plane earth, and up and down, losing the sense of the direction which stretches right and left. This direction will be an unknown dimension to him.
Let the reader picture themselves as they gaze across the plane, fig. 4, becoming increasingly connected to the slender body on it, until they finally look parallel to the surface of the flat earth, and up and down, losing the sense of direction that extends to the sides. This direction will be an unfamiliar dimension to them.
Our space conceptions are so intimately connected with those which we derive from the existence of gravitation that it is difficult to realise the condition of a plane being, without picturing him as in material surroundings with a definite direction of up and down. Hence the necessity of our somewhat elaborate scheme of representation, which, when its import has been grasped, can be dispensed with for the simpler one of a thin object slipping over a smooth surface, which lies in front of us.
Our ideas about space are so closely linked to what we understand from gravity that it's hard to imagine a being in a flat form without visualizing it in a physical environment, with a clear notion of up and down. This is why we have a somewhat complex way of representing this idea, which, once understood, can be replaced with the simpler image of a thin object sliding over a smooth surface in front of us.
It is obvious that we must suppose some means by which the plane being is kept in contact with the surface on which he slips. The simplest supposition to make is that there is a transverse gravity, which keeps him to the plane. This gravity must be thought of as different to the attraction exercised by his matter, and as unperceived by him.
It’s clear that we have to assume there’s some way for the plane being to stay in contact with the surface it’s sliding on. The easiest assumption is that there’s a sideways gravity that holds him to the plane. This gravity should be seen as different from the pull of his mass and something he doesn’t notice.
At this stage of our enquiry I do not wish to enter into the question of how a plane being could arrive at a knowledge of the third dimension, but simply to investigate his plane consciousness.
At this point in our investigation, I don't want to delve into how a being from a flat world could come to understand the third dimension; I just want to explore their flat world consciousness.
It is obvious that the existence of a plane being must be very limited. A straight line standing up from the surface of his earth affords a bar to his progress. An object like a wheel which rotates round an axis would be unknown to him, for there is no conceivable way in which he can get to the centre without going through the circumference. He would have spinning disks, but could not get to the centre of them. The plane being can represent the motion from any one point of his space[Pg 9] to any other, by means of two straight lines drawn at right angles to each other.
It's clear that a being existing in a two-dimensional plane would have very limited experiences. A straight line extending from the surface of his world would block his movement. An object like a wheel that rotates around an axis would be completely foreign to him, as there's no way for him to reach the center without passing through the outer edge. He could observe spinning disks but would be unable to access their centers. This two-dimensional being can represent movement from one point in his space to another using two straight lines drawn at right angles to each other.[Pg 9]

Let AX and AY be two such axes. He can accomplish the translation from A to B by going along AX to C, and then from C along CB parallel to AY.
Let AX and AY be two such axes. He can complete the move from A to B by traveling along AX to C, and then from C along CB parallel to AY.
The same result can of course be obtained by moving to D along AY and then parallel to AX from D to B, or of course by any diagonal movement compounded by these axial movements.
The same result can definitely be achieved by moving to D along AY and then parallel to AX from D to B, or, of course, by any diagonal movement combined with these axial movements.
By means of movements parallel to these two axes he can proceed (except for material obstacles) from any one point of his space to any other.
By moving parallel to these two axes, he can go from any point in his space to any other point (unless there are physical obstacles).

If now we suppose a third line drawn out from A at right angles to the plane it is evident that no motion in either of the two dimensions he knows will carry him in the least degree in the direction represented by AZ.
If we now imagine a third line extending from A at a right angle to the plane, it's clear that no movement in either of the two dimensions he understands will take him even a little in the direction indicated by AZ.
The lines AZ and AX determine a plane. If he could be taken off his plane, and transferred to the plane AXZ, he would be in a world exactly like his own. From every line in his world there goes off a space world exactly like his own.
The lines AZ and AX define a plane. If he could be removed from his plane and moved to the plane AXZ, he would find himself in a world just like his own. From every line in his world, there's a corresponding space world that's identical to his.

From every point in his world a line can be drawn parallel to AZ in the direction unknown to him. If we suppose the square in fig. 7 to be a geometrical square from every point of it, inside as well as on the contour, a straight line can be drawn parallel to AZ. The assemblage of these lines constitute a solid figure, of which the square in the plane is the base. If we consider the square to represent an object in the plane[Pg 10] being’s world then we must attribute to it a very small thickness, for every real thing must possess all three dimensions. This thickness he does not perceive, but thinks of this real object as a geometrical square. He thinks of it as possessing area only, and no degree of solidity. The edges which project from the plane to a very small extent he thinks of as having merely length and no breadth—as being, in fact, geometrical lines.
From every point in his world, a line can be drawn parallel to AZ in a direction that is unknown to him. If we assume the square in fig. 7 is a geometrical square, then from every point within it, as well as along its edges, a straight line can be drawn parallel to AZ. The collection of these lines forms a solid figure, with the square in the plane serving as the base. If we think of the square as representing an object in the being's world, we must give it a very small thickness because every real thing must have all three dimensions. He doesn’t perceive this thickness, but instead thinks of this real object as a geometrical square. He sees it as having area only, without any solidity. The edges that extend slightly out of the plane are considered to have only length and no width—essentially, they are viewed as geometrical lines.
With the first step in the apprehension of a third dimension there would come to a plane being the conviction that he had previously formed a wrong conception of the nature of his material objects. He had conceived them as geometrical figures of two dimensions only. If a third dimension exists, such figures are incapable of real existence. Thus he would admit that all his real objects had a certain, though very small thickness in the unknown dimension, and that the conditions of his existence demanded the supposition of an extended sheet of matter, from contact with which in their motion his objects never diverge.
With the first step in understanding a third dimension, a flat being would realize that he had previously misunderstood the nature of his material objects. He had thought of them as just two-dimensional shapes. If there is a third dimension, such shapes can't truly exist. Therefore, he would accept that all his real objects have a certain, albeit very small, thickness in this unknown dimension, and that his existence requires the assumption of an extended sheet of matter, with which his objects never separate during their movement.
Analogous conceptions must be formed by us on the supposition of a four-dimensional existence. We must suppose a direction in which we can never point extending from every point of our space. We must draw a distinction between a geometrical cube and a cube of real matter. The cube of real matter we must suppose to have an extension in an unknown direction, real, but so small as to be imperceptible by us. From every point of a cube, interior as well as exterior, we must imagine that it is possible to draw a line in the unknown direction. The assemblage of these lines would constitute a higher solid. The lines going off in the unknown direction from the face of a cube would constitute a cube starting from that face. Of this cube all that we should see in our space would be the face.
We need to form similar ideas based on the assumption of a four-dimensional existence. We have to imagine a direction that extends from every point in our space, but that we can never actually point to. We should differentiate between a geometric cube and a cube made of real matter. The real matter cube is thought to extend in an unknown direction—one that's real but so small that we can't perceive it. From every point of a cube, both inside and outside, we need to envision that we can draw a line in this unknown direction. The collection of these lines would create a higher-dimensional solid. The lines extending from the face of a cube would create a new cube starting from that face. All we would be able to see in our three-dimensional space would be the face of that cube.
[Pg 11]
[Pg 11]
Again, just as the plane being can represent any motion in his space by two axes, so we can represent any motion in our three-dimensional space by means of three axes. There is no point in our space to which we cannot move by some combination of movements on the directions marked out by these axes.
Again, just like the plane can represent any movement in its space with two axes, we can represent any movement in our three-dimensional space using three axes. There's no point in our space that we can't reach by combining movements along the directions defined by these axes.
On the assumption of a fourth dimension we have to suppose a fourth axis, which we will call AW. It must be supposed to be at right angles to each and every one of the three axes AX, AY, AZ. Just as the two axes, AX, AZ, determine a plane which is similar to the original plane on which we supposed the plane being to exist, but which runs off from it, and only meets it in a line; so in our space if we take any three axes such as AX, AY, and AW, they determine a space like our space world. This space runs off from our space, and if we were transferred to it we should find ourselves in a space exactly similar to our own.
Assuming there's a fourth dimension, we need to consider a fourth axis, which we will call AW. This axis would be at right angles to all three of the existing axes AX, AY, and AZ. Just as the two axes, AX and AZ, define a plane that is similar to the original plane we imagined, but diverges from it and only intersects at a line; in our space, if we take any three axes like AX, AY, and AW, they create a space similar to our own world. This space diverges from ours, and if we were to be transferred there, we would find ourselves in a space that is exactly like our own.
We must give up any attempt to picture this space in its relation to ours, just as a plane being would have to give up any attempt to picture a plane at right angles to his plane.
We must stop trying to imagine this space in relation to ours, just like a being in one plane would have to stop trying to visualize a plane that’s at right angles to their plane.
Such a space and ours run in different directions from the plane of AX and AY. They meet in this plane but have nothing else in common, just as the plane space of AX and AY and that of AX and AZ run in different directions and have but the line AX in common.
Such a space and ours move in different directions from the plane of AX and AY. They intersect in this plane but have nothing else in common, just like the plane space of AX and AY and that of AX and AZ, which also go in different directions and share only the line AX.
Omitting all discussion of the manner on which a plane being might be conceived to form a theory of a three-dimensional existence, let us examine how, with the means at his disposal, he could represent the properties of three-dimensional objects.
Omitting any discussion about how one might conceive of a plane being to form a theory of a three-dimensional existence, let’s look at how, with the tools he has, he could represent the properties of three-dimensional objects.

There are two ways in which the plane being can think of one of our solid bodies. He can think of the cube, fig. 8, as composed of a number of sections parallel to[Pg 12] his plane, each lying in the third dimension a little further off from his plane than the preceding one. These sections he can represent as a series of plane figures lying in his plane, but in so representing them he destroys the coherence of them in the higher figure. The set of squares, A, B, C, D, represents the section parallel to the plane of the cube shown in figure, but they are not in their proper relative positions.
There are two ways in which a being in a two-dimensional world can think about one of our solid objects. They can imagine the cube, fig. 8, as made up of several sections that are parallel to[Pg 12] their plane, with each section positioned a little further away in the third dimension than the one before it. They can depict these sections as a series of flat shapes lying in their plane, but in doing so, they lose the connection between them in the higher structure. The set of squares, A, B, C, D, represents the section parallel to the plane of the cube illustrated in the figure, but they aren't in their correct relative positions.
The plane being can trace out a movement in the third dimension by assuming discontinuous leaps from one section to another. Thus, a motion along the edge of the cube from left to right would be represented in the set of sections in the plane as the succession of the corners of the sections A, B, C, D. A point moving from A through BCD in our space must be represented in the plane as appearing in A, then in B, and so on, without passing through the intervening plane space.
The plane can show movement in three dimensions by making jumps from one section to another. So, moving along the edge of the cube from left to right would be shown in the sections of the plane as a sequence of the corners of the sections A, B, C, D. A point moving from A through BCD in our space would need to be represented in the plane as appearing in A, then in B, and so forth, without going through the space in between.
In these sections the plane being leaves out, of course, the extension in the third dimension; the distance between any two sections is not represented. In order to realise this distance the conception of motion can be employed.
In these sections, the plane leaves out, of course, the extension in the third dimension; the distance between any two sections isn’t represented. To understand this distance, we can use the idea of motion.

Let fig. 9 represent a cube passing transverse to the plane. It will appear to the plane being as a square object, but the matter of which this object is composed will be continually altering. One material particle takes the place of another, but it does not come from anywhere or go anywhere in the space which the plane being knows.
Let fig. 9 represent a cube moving across the plane. It will look like a square to the plane, but the material that makes up this object is constantly changing. One particle replaces another, but it doesn't come from or go anywhere in the space that the plane is aware of.
The analogous manner of representing a higher solid in our case, is to conceive it as composed of a number of[Pg 13] sections, each lying a little further off in the unknown direction than the preceding.
The similar way of representing a higher solid in our case is to think of it as made up of several [Pg 13] sections, each located a bit farther away in the unknown direction than the one before.

We can represent these sections as a number of solids. Thus the cubes A, B, C, D, may be considered as the sections at different intervals in the unknown dimension of a higher cube. Arranged thus their coherence in the higher figure is destroyed, they are mere representations.
We can represent these sections as several solid shapes. So the cubes A, B, C, D can be seen as sections at different intervals in the unknown dimension of a higher cube. When arranged this way, their connection in the higher structure is lost; they are just representations.
A motion in the fourth dimension from A through B, C, etc., would be continuous, but we can only represent it as the occupation of the positions A, B, C, etc., in succession. We can exhibit the results of the motion at different stages, but no more.
A movement in the fourth dimension from A to B, C, and so on, would be continuous, but we can only show it by occupying the positions A, B, C, etc., one after the other. We can display the results of the movement at different stages, but that’s it.
In this representation we have left out the distance between one section and another; we have considered the higher body merely as a series of sections, and so left out its contents. The only way to exhibit its contents is to call in the aid of the conception of motion.
In this representation, we’ve excluded the distance between each section; we’ve regarded the higher body simply as a series of sections, leaving out its contents. The only way to show its contents is by invoking the idea of motion.

If a higher cube passes transverse to our space, it will appear as a cube isolated in space, the part that has not come into our space and the part that has passed through will not be visible. The gradual passing through our space would appear as the change of the matter of the cube before us. One material particle in it is succeeded by another, neither coming nor going in any direction we can point to. In this manner, by the duration of the figure, we can exhibit the higher dimensionality of it; a cube of our matter, under the circumstances supposed, namely, that it has a motion transverse to our space, would instantly disappear. A higher cube would last till it had passed transverse to our space by its whole distance of extension in the fourth dimension.
If a higher cube passes through our space, it will look like a cube floating in space, with the part that hasn't entered our space and the part that has gone through being invisible. As it gradually moves through our space, it will seem like the matter of the cube is changing before our eyes. One particle in it is replaced by another, without any clear direction of movement we can identify. In this way, by observing how long the figure lasts, we can show its higher dimensionality; a cube made of our matter, in this scenario where it moves across our space, would disappear instantly. A higher cube would remain until it had completely passed through our space, covering its full distance in the fourth dimension.
[Pg 14]
[Pg 14]
As the plane being can think of the cube as consisting of sections, each like a figure he knows, extending away from his plane, so we can think of a higher solid as composed of sections, each like a solid which we know, but extending away from our space.
As the plane can think of the cube as made up of sections, each resembling a familiar shape and extending beyond his plane, we can think of a higher solid as made up of sections, each resembling a solid that we know but extending beyond our space.
Thus, taking a higher cube, we can look on it as starting from a cube in our space and extending in the unknown dimension.
Thus, if we take a larger cube, we can think of it as starting from a cube in our space and extending into the unknown dimension.

Take the face A and conceive it to exist as simply a face, a square with no thickness. From this face the cube in our space extends by the occupation of space which we can see.
Take the face A and imagine it as just a face, a square with no depth. From this face, the cube in our space expands by filling the space that we can see.
But from this face there extends equally a cube in the unknown dimension. We can think of the higher cube, then, by taking the set of sections A, B, C, D, etc., and considering that from each of them there runs a cube. These cubes have nothing in common with each other, and of each of them in its actual position all that we can have in our space is an isolated square. It is obvious that we can take our series of sections in any manner we please. We can take them parallel, for instance, to any one of the three isolated faces shown in the figure. Corresponding to the three series of sections at right angles to each other, which we can make of the cube in space, we must conceive of the higher cube, as composed of cubes starting from squares parallel to the faces of the cube, and of these cubes all that exist in our space are the isolated squares from which they start.
But from this face, there extends a cube in the unknown dimension. We can think of the higher cube by looking at the set of sections A, B, C, D, etc., and considering that each of them has a cube extending from it. These cubes are completely unrelated to each other, and all we can see in our space from each one in its actual position is an isolated square. It's clear that we can arrange our series of sections in any way we want. For example, we can align them parallel to any one of the three isolated faces shown in the figure. Corresponding to the three series of sections that are at right angles to each other, which we can make of the cube in space, we have to imagine the higher cube as being made up of cubes starting from squares that are parallel to the faces of the cube. All that exists in our space from these cubes are the isolated squares from which they originate.
[Pg 15]
[Pg 15]
CHAPTER III
THE SIGNIFICANCE OF A FOUR-DIMENSIONAL
EXISTENCE
Having now obtained the conception of a four-dimensional space, and having formed the analogy which, without any further geometrical difficulties, enables us to enquire into its properties, I will refer the reader, whose interest is principally in the mechanical aspect, to Chapters VI. and VII. In the present chapter I will deal with the general significance of the enquiry, and in the next with the historical origin of the idea.
Having now grasped the concept of four-dimensional space, and drawn the analogy that allows us to explore its properties without any additional geometric challenges, I will direct readers, particularly those interested in the mechanical aspect, to Chapters VI and VII. In this chapter, I will address the overall significance of the inquiry, while in the next chapter, I'll discuss the historical origin of the idea.
First, with regard to the question of whether there is any evidence that we are really in four-dimensional space, I will go back to the analogy of the plane world.
First, regarding whether there's any evidence that we actually exist in four-dimensional space, I’ll reference the analogy of the plane world.
A being in a plane world could not have any experience of three-dimensional shapes, but he could have an experience of three-dimensional movements.
A being in a flat world couldn't experience three-dimensional shapes, but they could experience three-dimensional movements.
We have seen that his matter must be supposed to have an extension, though a very small one, in the third dimension. And thus, in the small particles of his matter, three-dimensional movements may well be conceived to take place. Of these movements he would only perceive the resultants. Since all movements of an observable size in the plane world are two-dimensional, he would only perceive the resultants in two dimensions of the small three-dimensional movements. Thus, there would be phenomena which he could not explain by his[Pg 16] theory of mechanics—motions would take place which he could not explain by his theory of motion. Hence, to determine if we are in a four-dimensional world, we must examine the phenomena of motion in our space. If movements occur which are not explicable on the suppositions of our three-dimensional mechanics, we should have an indication of a possible four-dimensional motion, and if, moreover, it could be shown that such movements would be a consequence of a four-dimensional motion in the minute particles of bodies or of the ether, we should have a strong presumption in favour of the reality of the fourth dimension.
We have established that his matter must have some extension, even if it's very small, in the third dimension. Therefore, within the tiny particles of his matter, three-dimensional movements can be imagined. He would only perceive the outcomes of these movements. Since all observable movements in our two-dimensional world are flat, he would only see the results in two dimensions of those small three-dimensional movements. Consequently, there would be phenomena that he couldn't explain with his theory of mechanics—motions would happen that his motion theory couldn’t account for. Thus, to figure out whether we exist in a four-dimensional world, we need to look at the motion phenomena in our space. If movements happen that can't be explained by our three-dimensional mechanics, it would indicate a possible four-dimensional motion. Moreover, if it could be demonstrated that such movements result from four-dimensional motion in the tiny particles of bodies or in the ether, we would have strong evidence supporting the existence of the fourth dimension.
By proceeding in the direction of finer and finer subdivision, we come to forms of matter possessing properties different to those of the larger masses. It is probable that at some stage in this process we should come to a form of matter of such minute subdivision that its particles possess a freedom of movement in four dimensions. This form of matter I speak of as four-dimensional ether, and attribute to it properties approximating to those of a perfect liquid.
By moving towards smaller and smaller divisions, we encounter forms of matter that have different properties than the larger masses. It's likely that at some point in this process, we will reach a form of matter so finely divided that its particles can move freely in four dimensions. I refer to this form of matter as four-dimensional ether, and I attribute to it properties similar to those of a perfect liquid.
Deferring the detailed discussion of this form of matter to Chapter VI., we will now examine the means by which a plane being would come to the conclusion that three-dimensional movements existed in his world, and point out the analogy by which we can conclude the existence of four-dimensional movements in our world. Since the dimensions of the matter in his world are small in the third direction, the phenomena in which he would detect the motion would be those of the small particles of matter.
Deferring the detailed discussion of this form of matter to Chapter VI, we will now look at how a flat being would realize that three-dimensional movements existed in its world and highlight the analogy that allows us to conclude the presence of four-dimensional movements in our world. Since the dimensions of matter in its world are limited in the third direction, the phenomena it would notice to detect motion would involve small particles of matter.
Suppose that there is a ring in his plane. We can imagine currents flowing round the ring in either of two opposite directions. These would produce unlike effects, and give rise to two different fields of influence. If the[Pg 17] ring with a current in it in one direction be taken up and turned over, and put down again on the plane, it would be identical with the ring having a current in the opposite direction. An operation of this kind would be impossible to the plane being. Hence he would have in his space two irreconcilable objects, namely, the two fields of influence due to the two rings with currents in them in opposite directions. By irreconcilable objects in the plane I mean objects which cannot be thought of as transformed one into the other by any movement in the plane.
Imagine there's a ring in his plane. We can picture currents flowing around the ring in either of two opposite directions. These would create different effects and lead to two distinct fields of influence. If the[Pg 17] ring with a current in one direction is picked up, flipped over, and placed back down on the plane, it would be the same as the ring with a current flowing in the opposite direction. Such a transformation would be impossible for the being in the plane. Therefore, he would have two conflicting objects in his space, specifically, the two fields of influence from the rings with currents in opposite directions. By conflicting objects in the plane, I mean objects that cannot be viewed as transformed into one another by any movement within the plane.
Instead of currents flowing in the rings we can imagine a different kind of current. Imagine a number of small rings strung on the original ring. A current round these secondary rings would give two varieties of effect, or two different fields of influence, according to its direction. These two varieties of current could be turned one into the other by taking one of the rings up, turning it over, and putting it down again in the plane. This operation is impossible to the plane being, hence in this case also there would be two irreconcilable fields in the plane. Now, if the plane being found two such irreconcilable fields and could prove that they could not be accounted for by currents in the rings, he would have to admit the existence of currents round the rings—that is, in rings strung on the primary ring. Thus he would come to admit the existence of a three-dimensional motion, for such a disposition of currents is in three dimensions.
Instead of currents flowing in the rings, we can think of a different type of current. Picture a number of small rings connected to the original ring. A current around these smaller rings would create two types of effects or two different fields of influence, depending on its direction. These two types of current could be transformed into one another by lifting one of the rings, flipping it over, and placing it back down in the same plane. This action is impossible for beings existing in that plane, so there would be two conflicting fields in the plane as well. Now, if a being in the plane discovered two such conflicting fields and could show that they couldn't be explained by currents in the rings, they would have to accept the existence of currents around the rings—that is, in the rings connected to the main ring. By doing so, they would begin to recognize the existence of three-dimensional motion, because this arrangement of currents exists in three dimensions.
Now in our space there are two fields of different properties, which can be produced by an electric current flowing in a closed circuit or ring. These two fields can be changed one into the other by reversing the currents, but they cannot be changed one into the other by any turning about of the rings in our space; for the disposition of the field with regard to the ring itself is different when we[Pg 18] turn the ring, over and when we reverse the direction of the current in the ring.
Now in our space, there are two fields with different properties, which can be created by an electric current flowing in a closed circuit or loop. These two fields can be transformed into one another by reversing the currents, but they can't be switched one into the other just by turning the loops in our space. This is because the arrangement of the field in relation to the loop itself changes when we turn the loop over and when we reverse the direction of the current in the loop. [Pg 18]
As hypotheses to explain the differences of these two fields and their effects we can suppose the following kinds of space motions:—First, a current along the conductor; second, a current round the conductor—that is, of rings of currents strung on the conductor as an axis. Neither of these suppositions accounts for facts of observation.
As hypotheses to explain the differences between these two fields and their effects, we can consider the following types of motion in space: first, a current flowing along the conductor; second, a current circulating around the conductor—specifically, rings of current aligned with the conductor as an axis. Neither of these assumptions explains the observed facts.
Hence we have to make the supposition of a four-dimensional motion. We find that a four-dimensional rotation of the nature explained in a subsequent chapter, has the following characteristics:—First, it would give us two fields of influence, the one of which could be turned into the other by taking the circuit up into the fourth dimension, turning it over, and putting it down in our space again, precisely as the two kinds of fields in the plane could be turned one into the other by a reversal of the current in our space. Second, it involves a phenomenon precisely identical with that most remarkable and mysterious feature of an electric current, namely that it is a field of action, the rim of which necessarily abuts on a continuous boundary formed by a conductor. Hence, on the assumption of a four-dimensional movement in the region of the minute particles of matter, we should expect to find a motion analogous to electricity.
Therefore, we need to assume a four-dimensional motion. We discover that a four-dimensional rotation, as explained in a later chapter, has the following characteristics: First, it would create two fields of influence, one of which could be transformed into the other by taking the circuit into the fourth dimension, flipping it over, and placing it back in our space, just like how the two types of fields in a plane can be changed into one another by reversing the current in our space. Second, it involves a phenomenon that is exactly the same as that intriguing and mysterious aspect of an electric current: it is a field of action whose edge must touch a continuous boundary formed by a conductor. Therefore, if we assume a four-dimensional movement in the realm of tiny particles of matter, we should expect to see a motion similar to electricity.
Now, a phenomenon of such universal occurrence as electricity cannot be due to matter and motion in any very complex relation, but ought to be seen as a simple and natural consequence of their properties. I infer that the difficulty in its theory is due to the attempt to explain a four-dimensional phenomenon by a three-dimensional geometry.
Now, a phenomenon as universally present as electricity can't be just a result of matter and motion in any overly complicated way, but should be viewed as a straightforward and natural result of their properties. I conclude that the challenge in its theory comes from trying to explain a four-dimensional phenomenon using a three-dimensional framework.
In view of this piece of evidence we cannot disregard that afforded by the existence of symmetry. In this connection I will allude to the simple way of producing[Pg 19] the images of insects, sometimes practised by children. They put a few blots of ink in a straight line on a piece of paper, fold the paper along the blots, and on opening it the lifelike presentment of an insect is obtained. If we were to find a multitude of these figures, we should conclude that they had originated from a process of folding over; the chances against this kind of reduplication of parts is too great to admit of the assumption that they had been formed in any other way.
Considering this evidence, we can't ignore the significance of symmetry. In this context, I want to mention the simple method of creating images of insects that children sometimes use. They place a few ink blobs in a straight line on a piece of paper, fold the paper along the blobs, and when they unfold it, they get a lifelike representation of an insect. If we were to find many of these figures, we would conclude that they came from a process of folding over; the odds against this kind of duplication of parts are too high to believe they were created any other way.
The production of the symmetrical forms of organised beings, though not of course due to a turning over of bodies of any appreciable size in four-dimensional space, can well be imagined as due to a disposition in that manner of the smallest living particles from which they are built up. Thus, not only electricity, but life, and the processes by which we think and feel, must be attributed to that region of magnitude in which four-dimensional movements take place.
The creation of symmetrical forms in organized beings, while not actually the result of rotating large bodies in four-dimensional space, can be envisioned as arising from the arrangement of the smallest living particles that make them up. Therefore, it follows that electricity, as well as life and the processes through which we think and feel, should be connected to the realm of scale where four-dimensional movements occur.
I do not mean, however, that life can be explained as a four-dimensional movement. It seems to me that the whole bias of thought, which tends to explain the phenomena of life and volition, as due to matter and motion in some peculiar relation, is adopted rather in the interests of the explicability of things than with any regard to probability.
I don’t mean to say that life can be understood merely as a four-dimensional movement. It seems to me that the overall tendency in thought, which seeks to explain life and free will as caused by matter and motion in a specific way, is more about making things understandable than about considering what’s likely or probable.
Of course, if we could show that life were a phenomenon of motion, we should be able to explain a great deal that is at present obscure. But there are two great difficulties in the way. It would be necessary to show that in a germ capable of developing into a living being, there were modifications of structure capable of determining in the developed germ all the characteristics of its form, and not only this, but of determining those of all the descendants of such a form in an infinite series. Such a complexity of mechanical relations, undeniable though it be, cannot[Pg 20] surely be the best way of grouping the phenomena and giving a practical account of them. And another difficulty is this, that no amount of mechanical adaptation would give that element of consciousness which we possess, and which is shared in to a modified degree by the animal world.
Of course, if we could demonstrate that life is a phenomenon of motion, we could explain a lot of what is currently unclear. But there are two major challenges to this. First, we would need to show that within a germ capable of developing into a living being, there are structural modifications that dictate all the characteristics of its form, and not just that, but also dictate those of all its descendants in an infinite series. Such a complex set of mechanical relationships, although undeniable, cannot surely be the best way to categorize these phenomena and provide a practical explanation for them. The second challenge is that no amount of mechanical adaptation would create the element of consciousness that we have, which is also shared to a varying extent by the animal kingdom.
In those complex structures which men build up and direct, such as a ship or a railway train (and which, if seen by an observer of such a size that the men guiding them were invisible, would seem to present some of the phenomena of life) the appearance of animation is not due to any diffusion of life in the material parts of the structure, but to the presence of a living being.
In those intricate systems that people create and control, like a ship or a train (and which, if viewed by someone small enough that the operators were unseen, would seem to display some signs of life), the look of movement doesn't come from any spread of life within the materials of the structure, but rather from the presence of a living individual.
The old hypothesis of a soul, a living organism within the visible one, appears to me much more rational than the attempt to explain life as a form of motion. And when we consider the region of extreme minuteness characterised by four-dimensional motion the difficulty of conceiving such an organism alongside the bodily one disappears. Lord Kelvin supposes that matter is formed from the ether. We may very well suppose that the living organisms directing the material ones are co-ordinate with them, not composed of matter, but consisting of etherial bodies, and as such capable of motion through the ether, and able to originate material living bodies throughout the mineral.
The old idea of a soul, a living entity within the visible one, seems much more reasonable to me than trying to explain life as just a form of motion. When we look at the world of tiny particles characterized by four-dimensional motion, the challenge of imagining such an organism existing alongside the physical one fades away. Lord Kelvin suggests that matter is made up of ether. We can also imagine that the living organisms that guide the material ones are aligned with them, not made of matter, but made of etheric bodies, and as such, able to move through the ether and capable of creating material living beings out of minerals.
Hypotheses such as these find no immediate ground for proof or disproof in the physical world. Let us, therefore, turn to a different field, and, assuming that the human soul is a four-dimensional being, capable in itself of four dimensional movements, but in its experiences through the senses limited to three dimensions, ask if the history of thought, of these productivities which characterise man, correspond to our assumption. Let us pass in review those steps by which man, presumably a four-dimensional[Pg 21] being, despite his bodily environment, has come to recognise the fact of four-dimensional existence.
Hypotheses like these don't have immediate evidence for proof or disproof in the physical world. So, let's shift to a different area and assume that the human soul is a four-dimensional entity, able in itself to move in four dimensions, but limited to three dimensions in its sensory experiences. We should consider whether the history of thought and the creative outputs that define humanity align with this assumption. Let's review the steps through which humans, supposedly four-dimensional beings, have recognized the existence of four-dimensional reality despite their physical surroundings.
Deferring this enquiry to another chapter, I will here recapitulate the argument in order to show that our purpose is entirely practical and independent of any philosophical or metaphysical considerations.
Deferring this inquiry to another chapter, I will summarize the argument here to show that our goal is completely practical and not tied to any philosophical or metaphysical ideas.
If two shots are fired at a target, and the second bullet hits it at a different place to the first, we suppose that there was some difference in the conditions under which the second shot was fired from those affecting the first shot. The force of the powder, the direction of aim, the strength of the wind, or some condition must have been different in the second case, if the course of the bullet was not exactly the same as in the first case. Corresponding to every difference in a result there must be some difference in the antecedent material conditions. By tracing out this chain of relations we explain nature.
If two shots are fired at a target, and the second bullet hits it in a different spot than the first, we assume that there was some difference in the conditions under which the second shot was fired compared to the first. The force of the gunpowder, the direction of aim, the strength of the wind, or some other factor must have been different in the second case if the path of the bullet wasn't exactly the same as in the first. For every difference in the outcome, there must be some difference in the earlier material conditions. By tracing this chain of relationships, we explain nature.
But there is also another mode of explanation which we apply. If we ask what was the cause that a certain ship was built, or that a certain structure was erected, we might proceed to investigate the changes in the brain cells of the men who designed the works. Every variation in one ship or building from another ship or building is accompanied by a variation in the processes that go on in the brain matter of the designers. But practically this would be a very long task.
But there's also another way we explain things. If we ask why a particular ship was built or why a certain structure was constructed, we might look into the changes in the brain cells of the designers. Every difference between one ship or building and another is linked to differences in the brain processes of the designers. However, practically speaking, this would take a very long time.
A more effective mode of explaining the production of the ship or building would be to enquire into the motives, plans, and aims of the men who constructed them. We obtain a cumulative and consistent body of knowledge much more easily and effectively in the latter way.
A better way to explain how the ship or building was made is to look into the reasons, designs, and goals of the people who built them. We can gather a solid and coherent understanding much more easily and effectively this way.
Sometimes we apply the one, sometimes the other mode of explanation.
Sometimes we use one way of explaining, and sometimes we use another.
But it must be observed that the method of explanation founded on aim, purpose, volition, always presupposes[Pg 22] a mechanical system on which the volition and aim works. The conception of man as willing and acting from motives involves that of a number of uniform processes of nature which he can modify, and of which he can make application. In the mechanical conditions of the three-dimensional world, the only volitional agency which we can demonstrate is the human agency. But when we consider the four-dimensional world the conclusion remains perfectly open.
But we need to recognize that the method of explanation based on intention, purpose, and will always assumes[Pg 22] a mechanical system where will and intention operate. The idea of humans as willing and acting based on motives involves the existence of several consistent natural processes that they can change and apply. In the mechanical conditions of the three-dimensional world, the only form of will we can demonstrate is human action. However, when we think about the four-dimensional world, the conclusion remains completely open.
The method of explanation founded on purpose and aim does not, surely, suddenly begin with man and end with him. There is as much behind the exhibition of will and motive which we see in man as there is behind the phenomena of movement; they are co-ordinate, neither to be resolved into the other. And the commencement of the investigation of that will and motive which lies behind the will and motive manifested in the three-dimensional mechanical field is in the conception of a soul—a four-dimensional organism, which expresses its higher physical being in the symmetry of the body, and gives the aims and motives of human existence.
The way we explain things based on purpose and intention doesn’t just start and stop with humanity. There’s just as much behind the display of will and motivation in humans as there is behind the movements we observe; they exist together and can’t be simplified into one another. The beginning of exploring the will and motivation that underlie the expressions we see in the physical, three-dimensional world lies in the idea of a soul—a four-dimensional being that represents its higher physical form through the body’s symmetry, providing the aims and motivations of human life.
Our primary task is to form a systematic knowledge of the phenomena of a four-dimensional world and find those points in which this knowledge must be called in to complete our mechanical explanation of the universe. But a subsidiary contribution towards the verification of the hypothesis may be made by passing in review the history of human thought, and enquiring if it presents such features as would be naturally expected on this assumption.
Our main goal is to create a structured understanding of the phenomena in a four-dimensional world and identify the points where this knowledge is needed to enhance our mechanical explanation of the universe. Additionally, we can help verify this hypothesis by reviewing the history of human thought and examining whether it shows characteristics we would expect based on this assumption.
[Pg 23]
[Pg 23]
CHAPTER IV
THE FIRST CHAPTER IN THE HISTORY
OF FOUR SPACE
Parmenides, and the Asiatic thinkers with whom he is in close affinity, propound a theory of existence which is in close accord with a conception of a possible relation between a higher and a lower dimensional space. This theory, prior and in marked contrast to the main stream of thought, which we shall afterwards describe, forms a closed circle by itself. It is one which in all ages has had a strong attraction for pure intellect, and is the natural mode of thought for those who refrain from projecting their own volition into nature under the guise of causality.
Parmenides, along with the Asian thinkers he's closely linked to, presents a theory of existence that aligns closely with the idea of a possible relationship between higher and lower dimensions of space. This theory, which stands apart from the mainstream ideas we'll discuss later, creates a self-contained framework. Throughout history, it has deeply appealed to those who value pure intellect and is the natural way of thinking for those who avoid imposing their own will on nature under the pretense of causality.
According to Parmenides of the school of Elea the all is one, unmoving and unchanging. The permanent amid the transient—that foothold for thought, that solid ground for feeling on the discovery of which depends all our life—is no phantom; it is the image amidst deception of true being, the eternal, the unmoved, the one. Thus says Parmenides.
According to Parmenides from the Eleatic school, everything is one, unchanging, and motionless. The constant amidst the temporary—this anchor for thought, this firm foundation for feeling upon which our entire existence relies—is not an illusion; it represents the reality amid the lies of true existence, the eternal, the unchanging, the singular. This is what Parmenides asserts.
But how explain the shifting scene, these mutations of things!
But how do we explain the changing scene, these transformations of things!
“Illusion,” answers Parmenides. Distinguishing between truth and error, he tells of the true doctrine of the one—the false opinion of a changing world. He is no less memorable for the manner of his advocacy than for[Pg 24] the cause he advocates. It is as if from his firm foothold of being he could play with the thoughts under the burden of which others laboured, for from him springs that fluency of supposition and hypothesis which forms the texture of Plato’s dialectic.
“Illusion,” Parmenides replies. He distinguishes between truth and falsehood, explaining the true idea of the one—contrasting it with the mistaken belief in a changing world. He is just as memorable for how he argues as for the position he defends.[Pg 24] It’s as if from his solid understanding of existence he could manipulate the ideas that others struggled under, for his thoughts give rise to the fluidity of assumption and theory that makes up the fabric of Plato’s dialectic.
Can the mind conceive a more delightful intellectual picture than that of Parmenides, pointing to the one, the true, the unchanging, and yet on the other hand ready to discuss all manner of false opinion, forming a cosmogony too, false “but mine own” after the fashion of the time?
Can the mind imagine a more enjoyable intellectual image than that of Parmenides, highlighting the one, the true, the unchanging, while at the same time being open to discussing all kinds of false beliefs, even creating a false cosmogony “but my own” in the style of the era?
In support of the true opinion he proceeded by the negative way of showing the self-contradictions in the ideas of change and motion. It is doubtful if his criticism, save in minor points, has ever been successfully refuted. To express his doctrine in the ponderous modern way we must make the statement that motion is phenomenal, not real.
In support of his genuine viewpoint, he demonstrated the contradictions in the concepts of change and motion by arguing against them. It's uncertain if his critique, except for a few minor aspects, has ever been effectively disproven. To put his theory in today's heavy style, we would say that motion is just an appearance, not something real.
Let us represent his doctrine.
Let's represent his doctrine.
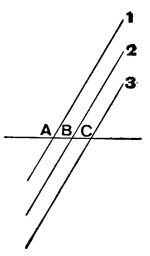
Imagine a sheet of still water into which a slanting stick is being lowered with a motion vertically downwards. Let 1, 2, 3 (Fig. 13), be three consecutive positions of the stick. A, B, C, will be three consecutive positions of the meeting of the stick, with the surface of the water. As the stick passes down, the meeting will move from A on to B and C.
Imagine a flat surface of water where a tilted stick is being lowered straight down. Let 1, 2, 3 (Fig. 13) represent three consecutive positions of the stick. A, B, C, will be three consecutive points where the stick meets the surface of the water. As the stick moves down, the point of contact will shift from A to B and then to C.
Suppose now all the water to be removed except a film. At the meeting of the film and the stick there will be an interruption of the film. If we suppose the film to have a property, like that of a soap bubble, of closing up round any penetrating object, then as the stick goes vertically downwards the interruption in the film will move on.
Suppose now all the water is removed except for a thin film. At the point where the film meets the stick, there will be a disruption in the film. If we assume the film has a property, like that of a soap bubble, of sealing around any object that penetrates it, then as the stick moves straight down, the disruption in the film will shift accordingly.
[Pg 25]
[Pg 25]

If we pass a spiral through the film the intersection will give a point moving in a circle shown by the dotted lines in the figure. Suppose now the spiral to be still and the film to move vertically upwards, the whole spiral will be represented in the film of the consecutive positions of the point of intersection. In the film the permanent existence of the spiral is experienced as a time series—the record of traversing the spiral is a point moving in a circle. If now we suppose a consciousness connected with the film in such a way that the intersection of the spiral with the film gives rise to a conscious experience, we see that we shall have in the film a point moving in a circle, conscious of its motion, knowing nothing of that real spiral the record of the successive intersections of which by the film is the motion of the point.
If we pass a spiral through the film, the intersection will create a point that moves in a circle, as shown by the dotted lines in the figure. Now, suppose the spiral is still, and the film is moving vertically upwards; the entire spiral will be represented in the film through the different positions of the intersection point. In the film, the continuous presence of the spiral is experienced as a sequence over time—the record of moving along the spiral appears as a point that moves in a circle. If we assume there is a consciousness connected to the film in such a way that the intersection of the spiral with the film produces a conscious experience, we can see that in the film, there will be a point moving in a circle, aware of its own motion, yet unaware of the actual spiral whose successive intersections with the film create this movement.
It is easy to imagine complicated structures of the nature of the spiral, structures consisting of filaments, and to suppose also that these structures are distinguishable from each other at every section. If we consider the intersections of these filaments with the film as it passes to be the atoms constituting a filmar universe, we shall have in the film a world of apparent motion; we shall have bodies corresponding to the filamentary structure, and the positions of these structures with regard to one another will give rise to bodies in the film moving amongst one another. This mutual motion is apparent merely. The reality is of permanent structures stationary, and all the relative motions accounted for by one steady movement of the film as a whole.
It’s easy to picture complex spiral-like structures made of filaments and to assume that these structures can be distinguished from each other at every point. If we think of where these filaments intersect with the film as the atoms making up a film universe, we’ll see a world of seeming motion in the film. We’ll identify bodies that correspond to the filament structures, and their positions relative to each other will create the illusion of movement among them. This apparent motion is just an illusion. The reality is of fixed structures that remain still, with all the relative movements explained by a single, steady motion of the film as a whole.
[Pg 26]
[Pg 26]
Thus we can imagine a plane world, in which all the variety of motion is the phenomenon of structures consisting of filamentary atoms traversed by a plane of consciousness. Passing to four dimensions and our space, we can conceive that all things and movements in our world are the reading off of a permanent reality by a space of consciousness. Each atom at every moment is not what it was, but a new part of that endless line which is itself. And all this system successively revealed in the time which is but the succession of consciousness, separate as it is in parts, in its entirety is one vast unity. Representing Parmenides’ doctrine thus, we gain a firmer hold on it than if we merely let his words rest, grand and massive, in our minds. And we have gained the means also of representing phases of that Eastern thought to which Parmenides was no stranger. Modifying his uncompromising doctrine, let us suppose, to go back to the plane of consciousness and the structure of filamentary atoms, that these structures are themselves moving—are acting, living. Then, in the transverse motion of the film, there would be two phenomena of motion, one due to the reading off in the film of the permanent existences as they are in themselves, and another phenomenon of motion due to the modification of the record of the things themselves, by their proper motion during the process of traversing them.
So, we can imagine a flat world where all the different types of movement are just the result of structures made up of thin atoms crossed by a plane of awareness. When we move to four dimensions and consider our space, we can see that everything and every movement in our world is just how a consciousness space interprets a constant reality. Every atom, at every moment, isn’t what it was before; it’s just a new part of that endless line that it represents. All of this system, revealed over time—which is just the flow of consciousness—though divided into parts, is, in its entirety, one huge unity. By presenting Parmenides’ ideas like this, we can grasp them more firmly than if we simply pondered his grand and substantial words. We also find a way to express aspects of the Eastern thought that Parmenides was familiar with. Adjusting his absolute doctrine, let’s assume, returning to the conscious plane and the structure of thin atoms, that these structures are actually moving—acting, living. In that case, in the sideways motion of the film, there would be two types of movement: one from interpreting the permanent existences as they are in themselves, and another type of movement from the changes in the record of things themselves, influenced by their own motion as they pass through.
Thus a conscious being in the plane would have, as it were, a two-fold experience. In the complete traversing of the structure, the intersection of which with the film gives his conscious all, the main and principal movements and actions which he went through would be the record of his higher self as it existed unmoved and unacting. Slight modifications and deviations from these movements and actions would represent the activity and self-determination of the complete being, of his higher self.
Thus, a conscious being in the plane would have, in a way, a two-fold experience. By fully exploring the structure, the intersection of which with the film provides all of his awareness, the main and primary movements and actions he went through would record his higher self as it existed unmoved and unacting. Minor changes and deviations from these movements and actions would represent the activity and self-determination of the complete being, of his higher self.
It is admissible to suppose that the consciousness in[Pg 27] the plane has a share in that volition by which the complete existence determines itself. Thus the motive and will, the initiative and life, of the higher being, would be represented in the case of the being in the film by an initiative and a will capable, not of determining any great things or important movements in his existence, but only of small and relatively insignificant activities. In all the main features of his life his experience would be representative of one state of the higher being whose existence determines his as the film passes on. But in his minute and apparently unimportant actions he would share in that will and determination by which the whole of the being he really is acts and lives.
It is reasonable to assume that the consciousness in[Pg 27] this realm contributes to the will through which the entire existence shapes itself. Therefore, the motivation and will, the initiative and life of a higher being, would be reflected in the case of a being in the film by an initiative and will that are not capable of defining great or significant events in their life, but only of minor and relatively trivial actions. In all the key aspects of their life, their experiences would represent a state of the higher being that influences their existence as the film unfolds. However, in their small and seemingly insignificant actions, they would be participating in the will and determination through which the entirety of their true being acts and lives.
An alteration of the higher being would correspond to a different life history for him. Let us now make the supposition that film after film traverses these higher structures, that the life of the real being is read off again and again in successive waves of consciousness. There would be a succession of lives in the different advancing planes of consciousness, each differing from the preceding, and differing in virtue of that will and activity which in the preceding had not been devoted to the greater and apparently most significant things in life, but the minute and apparently unimportant. In all great things the being of the film shares in the existence of his higher self as it is at any one time. In the small things he shares in that volition by which the higher being alters and changes, acts and lives.
A change in the higher self would mean a different life history for that being. Now, let’s assume that film after film explores these higher structures, with the life of the real being being revealed repeatedly in successive waves of consciousness. There would be a series of lives at different levels of consciousness, each one distinct from the last, differing because that will and activity in the previous lives had not focused on the greater and seemingly most important aspects of life, but rather on the small and seemingly trivial ones. In all significant matters, the being in the film is connected to the existence of his higher self at any given moment. In the small matters, he is part of the will through which the higher self evolves, changes, acts, and lives.
Thus we gain the conception of a life changing and developing as a whole, a life in which our separation and cessation and fugitiveness are merely apparent, but which in its events and course alters, changes, develops; and the power of altering and changing this whole lies in the will and power the limited being has of directing, guiding, altering himself in the minute things of his existence.
Thus we understand life as something that changes and evolves as a whole, a life where our separations, endings, and fleeting moments are just an illusion. In reality, life unfolds, transforms, and grows; and the ability to change and influence this whole is found in the will and power that each individual has to direct, guide, and modify themselves in the small aspects of their existence.
[Pg 28]
[Pg 28]
Transferring our conceptions to those of an existence in a higher dimensionality traversed by a space of consciousness, we have an illustration of a thought which has found frequent and varied expression. When, however, we ask ourselves what degree of truth there lies in it, we must admit that, as far as we can see, it is merely symbolical. The true path in the investigation of a higher dimensionality lies in another direction.
Transferring our ideas to those of a higher-dimensional existence explored by a space of consciousness, we have an example of a notion that has been expressed in many ways. However, when we consider how true this idea is, we have to acknowledge that, as far as we can tell, it is simply symbolic. The real approach to exploring higher dimensionality goes in a different direction.
The significance of the Parmenidean doctrine lies in this that here, as again and again, we find that those conceptions which man introduces of himself, which he does not derive from the mere record of his outward experience, have a striking and significant correspondence to the conception of a physical existence in a world of a higher space. How close we come to Parmenides’ thought by this manner of representation it is impossible to say. What I want to point out is the adequateness of the illustration, not only to give a static model of his doctrine, but one capable as it were, of a plastic modification into a correspondence into kindred forms of thought. Either one of two things must be true—that four-dimensional conceptions give a wonderful power of representing the thought of the East, or that the thinkers of the East must have been looking at and regarding four-dimensional existence.
The importance of the Parmenidean doctrine is that it repeatedly shows us that the ideas people have about themselves, which don't come solely from their external experiences, have a remarkable and meaningful connection to the idea of physical existence in a higher-dimensional world. It's impossible to measure just how closely this representation aligns with Parmenides' thinking. What I want to highlight is that this illustration serves not only as a static model of his doctrine but also has the potential to be dynamically reshaped into related forms of thought. One of two things must be true: either four-dimensional concepts provide an incredible way to express Eastern thought, or Eastern thinkers were contemplating and perceiving four-dimensional existence.
Coming now to the main stream of thought we must dwell in some detail on Pythagoras, not because of his direct relation to the subject, but because of his relation to investigators who came later.
Coming now to the main stream of thought, we need to focus in detail on Pythagoras, not because of his direct connection to the topic, but because of his influence on later researchers.
Pythagoras invented the two-way counting. Let us represent the single-way counting by the posits aa, ab, ac, ad, using these pairs of letters instead of the numbers 1, 2, 3, 4. I put an a in each case first for a reason which will immediately appear.
Pythagoras came up with two-way counting. Let’s show single-way counting using the pairs aa, ab, ac, ad, using these letter pairs instead of the numbers 1, 2, 3, 4. I placed an a first in each case for a reason that will soon become clear.
We have a sequence and order. There is no conception of distance necessarily involved. The difference[Pg 29] between the posits is one of order not of distance—only when identified with a number of equal material things in juxtaposition does the notion of distance arise.
We have a sequence and order. There’s no idea of distance that is necessarily involved. The difference[Pg 29] between the points is one of order, not distance—only when linked with a number of equal material things side by side does the idea of distance come up.
Now, besides the simple series I can have, starting from aa, ba, ca, da, from ab, bb, cb, db, and so on, and forming a scheme:
Now, aside from the basic combinations I can create, starting with aa, ba, ca, da, and including ab, bb, cb, db, and so on, I can develop a structure:
| da | db | dc | dd |
| ca | cb | cc | cd |
| ba | bb | bc | bd |
| aa | ab | ac | ad |
This complex or manifold gives a two-way order. I can represent it by a set of points, if I am on my guard against assuming any relation of distance.
This complex or manifold provides a two-way order. I can represent it as a set of points, as long as I’m careful not to assume any kind of distance relationship.

Pythagoras studied this two-fold way of counting in reference to material bodies, and discovered that most remarkable property of the combination of number and matter that bears his name.
Pythagoras examined this dual method of counting concerning physical objects and found that incredible property of the link between numbers and matter that is named after him.
The Pythagorean property of an extended material system can be exhibited in a manner which will be of use to us afterwards, and which therefore I will employ now instead of using the kind of figure which he himself employed.
The Pythagorean property of an extended material system can be shown in a way that will be useful to us later, so I'll use this method now instead of the type of figure he used.
Consider a two-fold field of points arranged in regular rows. Such a field will be presupposed in the following argument.
Consider a two-dimensional grid of points arranged in regular rows. This grid will be assumed in the following argument.

It is evident that in fig. 16 four of the points determine a square, which square we may take as the unit of measurement for areas. But we can also measure areas in another way.
It is clear that in fig. 16 four of the points form a square, which we can use as the standard unit for measuring areas. However, there is also another method to measure areas.
Fig. 16 (1) shows four points determining a square.
Fig. 16 (1) shows four points that define a square.
But four squares also meet in a point, fig. 16 (2).
But four squares also meet at a point, fig. 16 (2).
Hence a point at the corner of a square belongs equally to four squares.
Hence, a point at the corner of a square belongs equally to four squares.
[Pg 30]
[Pg 30]
Thus we may say that the point value of the square shown is one point, for if we take the square in fig. 16 (1) it has four points, but each of these belong equally to four other squares. Hence one fourth of each of them belongs to the square (1) in fig. 16. Thus the point value of the square is one point.
Thus we can say that the point value of the square shown is one point, because if we take the square in fig. 16 (1), it has four points, but each of these points equally belongs to four other squares. Therefore, one fourth of each of them belongs to the square (1) in fig. 16. Thus, the point value of the square is one point.
The result of counting the points is the same as that arrived at by reckoning the square units enclosed.
The outcome of tallying the points is the same as calculating the square units enclosed.
Hence, if we wish to measure the area of any square we can take the number of points it encloses, count these as one each, and take one-fourth of the number of points at its corners.
Hence, if we want to measure the area of any square, we can count the number of points it contains, consider each point as one, and take one-fourth of the number of points at its corners.

Now draw a diagonal square as shown in fig. 17. It contains one point and the four corners count for one point more; hence its point value is 2. The value is the measure of its area—the size of this square is two of the unit squares.
Now draw a diagonal square as shown in fig. 17. It has one point, and the four corners add one more point; so its point value is 2. The value reflects its area—the size of this square is two unit squares.
Looking now at the sides of this figure we see that there is a unit square on each of them—the two squares contain no points, but have four corner points each, which gives the point value of each as one point.
Looking at the sides of this figure now, we see that there is a unit square on each of them—neither square contains any points, but each has four corner points, giving the point value of each as one point.
Hence we see that the square on the diagonal is equal to the squares on the two sides; or as it is generally expressed, the square on the hypothenuse is equal to the sum of the squares on the sides.
Thus, we see that the square on the diagonal is equal to the squares on the two sides; or as it is commonly stated, the square on the hypotenuse is equal to the sum of the squares on the other two sides.
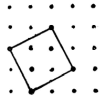
Noticing this fact we can proceed to ask if it is always true. Drawing the square shown in fig. 18, we can count the number of its points. There are five altogether. There are four points inside the square on the diagonal, and hence, with the four points at its corners the point value is 5—that is, the area is 5. Now the squares on the sides are respectively of the area 4 and 1. Hence in this case also the square[Pg 31] on the diagonal is equal to the sum of the square on the sides. This property of matter is one of the first great discoveries of applied mathematics. We shall prove afterwards that it is not a property of space. For the present it is enough to remark that the positions in which the points are arranged is entirely experimental. It is by means of equal pieces of some material, or the same piece of material moved from one place to another, that the points are arranged.
Noticing this fact, we can ask if it’s always true. By drawing the square shown in fig. 18, we can count the number of its points. There are five in total. There are four points inside the square along the diagonal, so with the four points at its corners, the point value is 5—that is, the area is 5. Now, the squares on the sides have areas of 4 and 1, respectively. So in this case, the square on the diagonal equals the sum of the squares on the sides. This property of matter is one of the first great discoveries of applied mathematics. We will prove later that it’s not a property of space. For now, it’s enough to note that the arrangement of the points is entirely experimental. The points are arranged using equal pieces of some material, or the same piece of material moved from one place to another.
Pythagoras next enquired what the relation must be so that a square drawn slanting-wise should be equal to one straight-wise. He found that a square whose side is five can be placed either rectangularly along the lines of points, or in a slanting position. And this square is equivalent to two squares of sides 4 and 3.
Pythagoras then asked what the relationship must be for a square drawn at an angle to be equal to one drawn straight. He discovered that a square with a side length of five can be oriented either at a right angle along the axes of points or at a diagonal. This square is equivalent to two squares with side lengths of 4 and 3.
Here he came upon a numerical relation embodied in a property of matter. Numbers immanent in the objects produced the equality so satisfactory for intellectual apprehension. And he found that numbers when immanent in sound—when the strings of a musical instrument were given certain definite proportions of length—were no less captivating to the ear than the equality of squares was to the reason. What wonder then that he ascribed an active power to number!
Here he discovered a numerical relationship present in a property of matter. The numbers inherent in the objects created an equality that was very satisfying for understanding. He also found that numbers present in sound—when the strings of a musical instrument were at specific lengths—were just as appealing to the ear as the equality of squares was to reason. It's no surprise, then, that he attributed an active power to numbers!
We must remember that, sharing like ourselves the search for the permanent in changing phenomena, the Greeks had not that conception of the permanent in matter that we have. To them material things were not permanent. In fire solid things would vanish; absolutely disappear. Rock and earth had a more stable existence, but they too grew and decayed. The permanence of matter, the conservation of energy, were unknown to them. And that distinction which we draw so readily between the fleeting and permanent causes of sensation, between a sound and a material object, for instance, had[Pg 32] not the same meaning to them which it has for us. Let us but imagine for a moment that material things are fleeting, disappearing, and we shall enter with a far better appreciation into that search for the permanent which, with the Greeks, as with us, is the primary intellectual demand.
We need to remember that, just like us, the Greeks were also searching for what was permanent in a world that kept changing, but they didn’t have the same understanding of permanence in matter that we do. To them, material things weren’t permanent. In fire, solid objects could completely vanish; they would totally disappear. Rocks and soil seemed more stable, but they too grew and decayed. They didn’t know about the permanence of matter or the conservation of energy. The distinction we easily make between the temporary and the permanent causes of perception—like between a sound and a physical object—didn’t hold the same meaning for them as it does for us. If we could just imagine for a moment that material things are fleeting and can disappear, we would gain a much deeper understanding of that search for permanence which, like for the Greeks, is the fundamental intellectual pursuit for us as well.
What is that which amid a thousand forms is ever the same, which we can recognise under all its vicissitudes, of which the diverse phenomena are the appearances?
What is it that, despite countless forms, always remains the same, that we can recognize through all its changes, of which the various phenomena are just its appearances?
To think that this is number is not so very wide of the mark. With an intellectual apprehension which far outran the evidences for its application, the atomists asserted that there were everlasting material particles, which, by their union, produced all the varying forms and states of bodies. But in view of the observed facts of nature as then known, Aristotle, with perfect reason, refused to accept this hypothesis.
To think that this number isn't too far off. With an understanding that went beyond the evidence supporting its use, the atomists claimed that there were eternal material particles that, when combined, created all the different forms and states of matter. However, based on the natural facts known at the time, Aristotle had every reason to reject this idea.
He expressly states that there is a change of quality, and that the change due to motion is only one of the possible modes of change.
He clearly states that there's a change in quality, and that the change caused by motion is just one of the possible ways change can happen.
With no permanent material world about us, with the fleeting, the unpermanent, all around we should, I think, be ready to follow Pythagoras in his identification of number with that principle which subsists amidst all changes, which in multitudinous forms we apprehend immanent in the changing and disappearing substance of things.
With no lasting material world around us, with everything being fleeting and temporary, I believe we should be open to following Pythagoras in his idea that number represents that principle that exists through all changes, which we perceive in various forms within the shifting and vanishing substance of things.
And from the numerical idealism of Pythagoras there is but a step to the more rich and full idealism of Plato. That which is apprehended by the sense of touch we put as primary and real, and the other senses we say are merely concerned with appearances. But Plato took them all as valid, as giving qualities of existence. That the qualities were not permanent in the world as given to the senses forced him to attribute to them a different[Pg 33] kind of permanence. He formed the conception of a world of ideas, in which all that really is, all that affects us and gives the rich and wonderful wealth of our experience, is not fleeting and transitory, but eternal. And of this real and eternal we see in the things about us the fleeting and transient images.
And from Pythagoras's numerical idealism, it’s just a short step to Plato's richer and fuller idealism. We consider what we can touch as primary and real, while we say the other senses only deal with appearances. But Plato accepted all the senses as valid, seeing them as aspects of existence. The fact that these qualities aren’t permanent in the world as experienced through our senses led him to assign them a different kind of permanence. He developed the idea of a world of forms, where everything that truly exists, everything that influences us and provides the incredible richness of our experiences, is not temporary but eternal. What we see around us are just fleeting and transient images of this real and eternal essence.[Pg 33]
And this world of ideas was no exclusive one, wherein was no place for the innermost convictions of the soul and its most authoritative assertions. Therein existed justice, beauty—the one, the good, all that the soul demanded to be. The world of ideas, Plato’s wonderful creation preserved for man, for his deliberate investigation and their sure development, all that the rude incomprehensible changes of a harsh experience scatters and destroys.
And this world of ideas wasn’t exclusive; it had room for the deepest beliefs of the soul and its strongest truths. In this world, there was justice, beauty—the one, the good, everything the soul needed to be. The world of ideas, Plato’s amazing creation set aside for people, for their thoughtful exploration and growth, held onto everything that the rough, confusing changes of a harsh reality scatter and ruin.
Plato believed in the reality of ideas. He meets us fairly and squarely. Divide a line into two parts, he says; one to represent the real objects in the world, the other to represent the transitory appearances, such as the image in still water, the glitter of the sun on a bright surface, the shadows on the clouds.
Plato believed in the reality of ideas. He confronts us directly. He suggests dividing a line into two sections: one representing the actual objects in the world, and the other representing fleeting appearances, like the reflection in still water, the shimmer of the sun on a bright surface, or the shadows on the clouds.

| Real things: e.g., the sun. |
Appearances: e.g., the reflection of the sun. |
Take another line and divide it into two parts, one representing our ideas, the ordinary occupants of our minds, such as whiteness, equality, and the other representing our true knowledge, which is of eternal principles, such as beauty, goodness.
Take another line and split it into two parts, one showing our ideas, the everyday thoughts we have, like whiteness and equality, and the other showing our true knowledge, which is about eternal principles, like beauty and goodness.

| Eternal principles, as beauty. |
Appearances in the mind, as whiteness, equality |
Then as A is to B, so is A1 to B1
Then as A is to B, so is A1 to B1
That is, the soul can proceed, going away from real[Pg 34] things to a region of perfect certainty, where it beholds what is, not the scattered reflections; beholds the sun, not the glitter on the sands; true being, not chance opinion.
That is, the soul can move away from real[Pg 34] things to a place of complete certainty, where it sees what truly exists, not just scattered reflections; sees the sun, not the shine on the sand; true existence, not random opinion.
Now, this is to us, as it was to Aristotle, absolutely inconceivable from a scientific point of view. We can understand that a being is known in the fulness of his relations; it is in his relations to his circumstances that a man’s character is known; it is in his acts under his conditions that his character exists. We cannot grasp or conceive any principle of individuation apart from the fulness of the relations to the surroundings.
Now, this is to us, as it was to Aristotle, completely unimaginable from a scientific perspective. We can understand that a person is defined by the entirety of their relationships; a person's character is revealed in relation to their circumstances; it is through their actions under specific conditions that their character is formed. We can't understand or conceive of any principle of individuality apart from the totality of their connections to their environment.
But suppose now that Plato is talking about the higher man—the four-dimensional being that is limited in our external experience to a three-dimensional world. Do not his words begin to have a meaning? Such a being would have a consciousness of motion which is not as the motion he can see with the eyes of the body. He, in his own being, knows a reality to which the outward matter of this too solid earth is flimsy superficiality. He too knows a mode of being, the fulness of relations, in which can only be represented in the limited world of sense, as the painter unsubstantially portrays the depths of woodland, plains, and air. Thinking of such a being in man, was not Plato’s line well divided?
But let's consider that Plato is discussing the higher man—the four-dimensional being that is constrained in our external experience to a three-dimensional world. Don’t his words start to make sense? Such a being would have a perception of movement that isn’t the same as the motion he can see with his physical eyes. He understands a reality in his own existence that makes the tangible matter of this overly solid earth seem flimsy and superficial. He also knows a state of being, the fullness of relationships, which can only be represented in the limited world of our senses, much like how a painter inadequately depicts the depths of forests, fields, and sky. When thinking of such a being in man, wasn’t Plato’s distinction quite insightful?
It is noteworthy that, if Plato omitted his doctrine of the independent origin of ideas, he would present exactly the four-dimensional argument; a real thing as we think it is an idea. A plane being’s idea of a square object is the idea of an abstraction, namely, a geometrical square. Similarly our idea of a solid thing is an abstraction, for in our idea there is not the four-dimensional thickness which is necessary, however slight, to give reality. The argument would then run, as a shadow is to a solid object, so is the solid object to the reality. Thus A and B´ would be identified.
It’s important to note that if Plato left out his belief in the independent origin of ideas, he would present an argument that’s exactly four-dimensional; a real thing, as we think of it, is an idea. A two-dimensional being’s idea of a square object is just the concept of an abstraction, which is a geometrical square. Likewise, our idea of a solid object is also an abstraction because in our concept, there’s no four-dimensional thickness necessary, however minimal, to make it real. The argument would go like this: just as a shadow relates to a solid object, a solid object relates to reality. Therefore, A and B’ would be seen as the same.
[Pg 35]
[Pg 35]
In the allegory which I have already alluded to, Plato in almost as many words shows forth the relation between existence in a superficies and in solid space. And he uses this relation to point to the conditions of a higher being.
In the allegory I mentioned before, Plato almost explicitly explains the connection between existing on a surface and in solid space. He uses this connection to highlight the conditions for a higher existence.
He imagines a number of men prisoners, chained so that they look at the wall of a cavern in which they are confined, with their backs to the road and the light. Over the road pass men and women, figures and processions, but of all this pageant all that the prisoners behold is the shadow of it on the wall whereon they gaze. Their own shadows and the shadows of the things in the world are all that they see, and identifying themselves with their shadows related as shadows to a world of shadows, they live in a kind of dream.
He envisions a group of men who are prisoners, chained up so they can only face the wall of a cave where they are trapped, their backs turned to the path and the light. As people and groups walk along the path, the prisoners can only see the shadows of this spectacle on the wall they’re staring at. All they perceive are their own shadows and the shadows of objects in the world; by identifying themselves with their shadows, which are merely reflections of a shadowy world, they exist in a sort of dream.
Plato imagines one of their number to pass out from amongst them into the real space world, and then returning to tell them of their condition.
Plato imagines one of them stepping out into the real world and then coming back to tell everyone about their situation.
Here he presents most plainly the relation between existence in a plane world and existence in a three-dimensional world. And he uses this illustration as a type of the manner in which we are to proceed to a higher state from the three-dimensional life we know.
Here he clearly shows the connection between living in a flat world and living in a three-dimensional world. He uses this example to illustrate how we should move toward a higher state from the three-dimensional life we understand.
It must have hung upon the weight of a shadow which path he took!—whether the one we shall follow toward the higher solid and the four-dimensional existence, or the one which makes ideas the higher realities, and the direct perception of them the contact with the truer world.
It must have depended on the weight of a shadow which path he chose!—whether it was the one we will take towards a more solid and four-dimensional existence, or the one that makes ideas the higher realities, and directly perceiving them the connection with the truer world.
Passing on to Aristotle, we will touch on the points which most immediately concern our enquiry.
Passing on to Aristotle, we will discuss the points that are most relevant to our investigation.
Just as a scientific man of the present day in reviewing the speculations of the ancient world would treat them with a curiosity half amused but wholly respectful, asking of each and all wherein lay their[Pg 36] relation to fact, so Aristotle, in discussing the philosophy of Greece as he found it, asks, above all other things: “Does this represent the world? In this system is there an adequate presentation of what is?”
Just like a modern scientist would look back at the theories of the ancient world with a mix of amusement and respect, questioning how each one relates to reality, Aristotle, when discussing the philosophy of Greece as he encountered it, asks above all else: “Does this accurately depict the world? Is this system a sufficient representation of what truly exists?”[Pg 36]
He finds them all defective, some for the very reasons which we esteem them most highly, as when he criticises the Atomic theory for its reduction of all change to motion. But in the lofty march of his reason he never loses sight of the whole; and that wherein our views differ from his lies not so much in a superiority of our point of view, as in the fact which he himself enunciates—that it is impossible for one principle to be valid in all branches of enquiry. The conceptions of one method of investigation are not those of another; and our divergence lies in our exclusive attention to the conceptions useful in one way of apprehending nature rather than in any possibility we find in our theories of giving a view of the whole transcending that of Aristotle.
He sees all of them as flawed, some for the very reasons we value them most, like when he critiques the Atomic theory for reducing all change to motion. Yet, in the grand scheme of his reasoning, he never loses sight of the big picture; our differing views from his aren’t so much about having a superior perspective, but rather in the fact he himself states—that it's impossible for one principle to apply across all areas of inquiry. The ideas from one method of investigation aren't the same as those from another, and our disagreement stems from our exclusive focus on the concepts that are useful in one way of understanding nature, rather than any capability we think our theories have in providing a view of the whole that goes beyond Aristotle's.
He takes account of everything; he does not separate matter and the manifestation of matter; he fires all together in a conception of a vast world process in which everything takes part—the motion of a grain of dust, the unfolding of a leaf, the ordered motion of the spheres in heaven—all are parts of one whole which he will not separate into dead matter and adventitious modifications.
He considers everything together; he doesn't separate matter from its physical form; he views all of it as part of a huge global process where everything plays a role—the movement of a speck of dust, the opening of a leaf, the organized motion of celestial bodies—all are aspects of one unified whole that he refuses to divide into lifeless matter and random changes.
And just as our theories, as representative of actuality, fall before his unequalled grasp of fact, so the doctrine of ideas fell. It is not an adequate account of existence, as Plato himself shows in his “Parmenides”; it only explains things by putting their doubles beside them.
And just as our theories, which represent reality, fail against his unmatched understanding of facts, so the doctrine of ideas also crumbled. It doesn’t fully account for existence, as Plato himself demonstrates in his “Parmenides”; it merely explains things by placing their counterparts next to them.
For his own part Aristotle invented a great marching definition which, with a kind of power of its own, cleaves its way through phenomena to limiting conceptions on[Pg 37] either hand, towards whose existence all experience points.
For his part, Aristotle created a strong definition that, with its own kind of force, cuts through appearances to reach fundamental concepts on[Pg 37] either side, towards which all experience leads.
In Aristotle’s definition of matter and form as the constituent of reality, as in Plato’s mystical vision of the kingdom of ideas, the existence of the higher dimensionality is implicitly involved.
In Aristotle's definition of matter and form as the building blocks of reality, similar to Plato's mystical view of the realm of ideas, the presence of a higher dimensionality is implicitly included.
Substance according to Aristotle is relative, not absolute. In everything that is there is the matter of which it is composed, the form which it exhibits; but these are indissolubly connected, and neither can be thought without the other.
Substance, according to Aristotle, is relative, not absolute. In everything that exists, there is the matter it’s made of and the form it shows; however, these two are inseparably linked, and neither can be considered without the other.
The blocks of stone out of which a house is built are the material for the builder; but, as regards the quarrymen, they are the matter of the rocks with the form he has imposed on them. Words are the final product of the grammarian, but the mere matter of the orator or poet. The atom is, with us, that out of which chemical substances are built up, but looked at from another point of view is the result of complex processes.
The blocks of stone that make up a house are the builder's materials; however, for the quarrymen, they are just the raw rocks that the builder has shaped. Words are the final output of the grammarian, but they are simply the raw materials for the orator or poet. An atom is what we use to build chemical substances, but from another perspective, it's the outcome of complex processes.
Nowhere do we find finality. The matter in one sphere is the matter, plus form, of another sphere of thought. Making an obvious application to geometry, plane figures exist as the limitation of different portions of the plane by one another. In the bounding lines the separated matter of the plane shows its determination into form. And as the plane is the matter relatively to determinations in the plane, so the plane itself exists in virtue of the determination of space. A plane is that wherein formless space has form superimposed on it, and gives an actuality of real relations. We cannot refuse to carry this process of reasoning a step farther back, and say that space itself is that which gives form to higher space. As a line is the determination of a plane, and a plane of a solid, so solid space itself is the determination of a higher space.
Nowhere do we find finality. What exists in one area is the substance, plus shape, of another way of thinking. To make a clear point about geometry, flat shapes are created by the boundaries that separate different parts of the plane from each other. In these lines, the distinct substance of the plane demonstrates its shaping into form. Just as the plane serves as the substance relative to the shapes within it, the plane itself exists because of the shaping of space. A plane is where unshaped space has shape added to it, creating real relationships. We can’t avoid taking this reasoning a step further back and asserting that space itself is what shapes higher space. Just as a line defines a plane, and a plane defines a solid, solid space itself is the form of a higher space.
As a line by itself is inconceivable without that plane[Pg 38] which it separates, so the plane is inconceivable without the solids which it limits on either hand. And so space itself cannot be positively defined. It is the negation of the possibility of movement in more than three dimensions. The conception of space demands that of a higher space. As a surface is thin and unsubstantial without the substance of which it is the surface, so matter itself is thin without the higher matter.
As a line by itself is unthinkable without the plane[Pg 38] it divides, the plane can't be imagined without the solids it boundaries on either side. Thus, space itself can't be defined definitively. It's the absence of the ability to move in more than three dimensions. Understanding space requires the idea of a higher space. Just as a surface feels insubstantial without the material it represents, matter alone feels lacking without the higher matter.
Just as Aristotle invented that algebraical method of representing unknown quantities by mere symbols, not by lines necessarily determinate in length as was the habit of the Greek geometers, and so struck out the path towards those objectifications of thought which, like independent machines for reasoning, supply the mathematician with his analytical weapons, so in the formulation of the doctrine of matter and form, of potentiality and actuality, of the relativity of substance, he produced another kind of objectification of mind—a definition which had a vital force and an activity of its own.
Just like Aristotle created that algebraic way of showing unknown quantities with just symbols, instead of rigid line lengths like the Greek geometers used to do, he paved the way for thought to be treated as if it were independent reasoning machines, giving mathematicians their analytical tools. In defining concepts like matter and form, potentiality and actuality, and the relativity of substance, he developed another kind of conceptual framework—a definition that had its own energy and effectiveness.
In none of his writings, as far as we know, did he carry it to its legitimate conclusion on the side of matter, but in the direction of the formal qualities he was led to his limiting conception of that existence of pure form which lies beyond all known determination of matter. The unmoved mover of all things is Aristotle’s highest principle. Towards it, to partake of its perfection all things move. The universe, according to Aristotle, is an active process—he does not adopt the illogical conception that it was once set in motion and has kept on ever since. There is room for activity, will, self-determination, in Aristotle’s system, and for the contingent and accidental as well. We do not follow him, because we are accustomed to find in nature infinite series, and do not feel obliged to pass on to a belief in the ultimate limits to which they seem to point.
In none of his writings, as far as we know, did he take it to its true conclusion regarding matter, but when it comes to its formal qualities, he arrived at his limiting idea of a pure form that exists beyond all known determinations of matter. The unmoved mover of everything is Aristotle’s highest principle. Everything moves towards it in order to share in its perfection. According to Aristotle, the universe is an active process—he doesn’t accept the illogical idea that it was set in motion once and has been moving ever since. There’s room for activity, will, and self-determination in Aristotle’s system, as well as for the contingent and accidental. We don’t follow him because we tend to see infinite series in nature and don’t feel the need to believe in the ultimate limits they seem to suggest.
[Pg 39]
[Pg 39]
But apart from the pushing to the limit, as a relative principle this doctrine of Aristotle’s as to the relativity of substance is irrefragible in its logic. He was the first to show the necessity of that path of thought which when followed leads to a belief in a four-dimensional space.
But aside from the extremes, this principle of Aristotle’s regarding the relativity of substance is undeniable in its logic. He was the first to demonstrate the necessity of that line of thinking which, when pursued, leads to a belief in four-dimensional space.
Antagonistic as he was to Plato in his conception of the practical relation of reason to the world of phenomena, yet in one point he coincided with him. And in this he showed the candour of his intellect. He was more anxious to lose nothing than to explain everything. And that wherein so many have detected an inconsistency, an inability to free himself from the school of Plato, appears to us in connection with our enquiry as an instance of the acuteness of his observation. For beyond all knowledge given by the senses Aristotle held that there is an active intelligence, a mind not the passive recipient of impressions from without, but an active and originative being, capable of grasping knowledge at first hand. In the active soul Aristotle recognised something in man not produced by his physical surroundings, something which creates, whose activity is a knowledge underived from sense. This, he says, is the immortal and undying being in man.
As much as he opposed Plato's views on the practical relationship between reason and the world of appearances, he agreed with him on one point. This showed the openness of his intellect. He was more focused on not missing anything than on explaining everything. What many see as a contradiction or an inability to break free from Plato's ideas actually reflects his sharp observation in relation to our inquiry. Aristotle believed that beyond all knowledge gained through the senses, there exists an active intelligence—a mind that isn't just a passive receiver of outside impressions but is an active and creative force capable of understanding knowledge firsthand. In the active soul, Aristotle recognized something in humans that isn't shaped by their physical environment, something that creates, with an activity that comes from knowledge independent of the senses. This, he stated, is the immortal and eternal aspect of humanity.
Thus we see that Aristotle was not far from the recognition of the four-dimensional existence, both without and within man, and the process of adequately realising the higher dimensional figures to which we shall come subsequently is a simple reduction to practice of his hypothesis of a soul.
Thus we see that Aristotle was close to recognizing the four-dimensional existence, both outside and inside of man, and the process of properly understanding the higher dimensional figures that we will discuss later is simply putting into practice his idea of a soul.
The next step in the unfolding of the drama of the recognition of the soul as connected with our scientific conception of the world, and, at the same time, the recognition of that higher of which a three-dimensional world presents the superficial appearance, took place many centuries later. If we pass over the intervening time[Pg 40] without a word it is because the soul was occupied with the assertion of itself in other ways than that of knowledge. When it took up the task in earnest of knowing this material world in which it found itself, and of directing the course of inanimate nature, from that most objective aim came, reflected back as from a mirror, its knowledge of itself.
The next step in the unfolding drama of recognizing the soul’s connection to our scientific view of the world, and at the same time understanding that higher aspect which the three-dimensional world only superficially shows, happened many centuries later. If we skip over the time in between[Pg 40] without mentioning it, it's because the soul was focused on asserting itself in ways other than through knowledge. When it seriously took on the task of understanding the material world it inhabited and influencing the course of inanimate nature, its knowledge of itself was reflected back like in a mirror from that most objective goal.
[Pg 41]
[Pg 41]
CHAPTER V
THE SECOND CHAPTER IN THE HISTORY
OF FOUR SPACE
Lobatchewsky, Bolyai, and Gauss Before entering on a description of the work of Lobatchewsky and Bolyai it will not be out of place to give a brief account of them, the materials for which are to be found in an article by Franz Schmidt in the forty-second volume of the Mathematische Annalen, and in Engel’s edition of Lobatchewsky.
Lobachevsky, Bolyai, and Gauss Before diving into the work of Lobatchewsky and Bolyai, it’s worth providing a brief overview of them, which can be found in an article by Franz Schmidt in the forty-second volume of the Mathematische Annalen, and in Engel’s edition of Lobatchewsky.
Lobatchewsky was a man of the most complete and wonderful talents. As a youth he was full of vivacity, carrying his exuberance so far as to fall into serious trouble for hazing a professor, and other freaks. Saved by the good offices of the mathematician Bartels, who appreciated his ability, he managed to restrain himself within the bounds of prudence. Appointed professor at his own University, Kasan, he entered on his duties under the regime of a pietistic reactionary, who surrounded himself with sycophants and hypocrites. Esteeming probably the interests of his pupils as higher than any attempt at a vain resistance, he made himself the tyrant’s right-hand man, doing an incredible amount of teaching and performing the most varied official duties. Amidst all his activities he found time to make important contributions to science. His theory of parallels is most[Pg 42] closely connected with his name, but a study of his writings shows that he was a man capable of carrying on mathematics in its main lines of advance, and of a judgment equal to discerning what these lines were. Appointed rector of his University, he died at an advanced age, surrounded by friends, honoured, with the results of his beneficent activity all around him. To him no subject came amiss, from the foundations of geometry to the improvement of the stoves by which the peasants warmed their houses.
Lobatchewsky was an incredibly talented individual. As a young man, he was full of life, so much so that he got into serious trouble for hazing a professor and other antics. Fortunately, he was saved by the mathematician Bartels, who recognized his talent, and he managed to control himself. When he was appointed as a professor at his university in Kasan, he started his duties under a strict, religiously conservative head, who surrounded himself with flatterers and pretenders. Valuing the well-being of his students over any futile resistance, he became the tyrant’s right-hand man, teaching a great deal and taking on a variety of official responsibilities. Despite his many commitments, he still found time to make significant contributions to science. His theory of parallels is most[Pg 42] closely associated with him, but a look at his writings reveals that he was capable of advancing mathematics in key areas and had the insight to identify which areas were worth pursuing. After being appointed rector of his university, he died at an old age, surrounded by friends and respected, with the impact of his positive contributions evident all around him. No topic was off-limits for him, from the basics of geometry to improving the stoves that the peasants used to heat their homes.
He was born in 1793. His scientific work was unnoticed till, in 1867, Houel, the French mathematician, drew attention to its importance.
He was born in 1793. His scientific work went unnoticed until 1867, when Houel, the French mathematician, highlighted its significance.
Johann Bolyai de Bolyai was born in Klausenburg, a town in Transylvania, December 15th, 1802.
Johann Bolyai de Bolyai was born in Cluj-Napoca, a town in Transylvania, on December 15, 1802.
His father, Wolfgang Bolyai, a professor in the Reformed College of Maros Vasarhely, retained the ardour in mathematical studies which had made him a chosen companion of Gauss in their early student days at Göttingen.
His father, Wolfgang Bolyai, a professor at the Reformed College of Maros Vasarhely, maintained the passion for mathematics that had made him a favored peer of Gauss during their early student days at Göttingen.
He found an eager pupil in Johann. He relates that the boy sprang before him like a devil. As soon as he had enunciated a problem the child would give the solution and command him to go on further. As a thirteen-year-old boy his father sometimes sent him to fill his place when incapacitated from taking his classes. The pupils listened to him with more attention than to his father for they found him clearer to understand.
He found an eager student in Johann. He says that the boy would leap in front of him like a little devil. As soon as he stated a problem, the kid would provide the solution and urge him to continue. At thirteen, his father sometimes sent him to take his place when he was unable to teach his classes. The students paid more attention to him than to his father because they found him easier to understand.
In a letter to Gauss Wolfgang Bolyai writes:—
In a letter to Gauss, Wolfgang Bolyai writes:—
“My boy is strongly built. He has learned to recognise many constellations, and the ordinary figures of geometry. He makes apt applications of his notions, drawing for instance the positions of the stars with their constellations. Last winter in the country, seeing Jupiter he asked: ‘How is it that we can see him from here as well as from[Pg 43] the town? He must be far off.’ And as to three different places to which he had been he asked me to tell him about them in one word. I did not know what he meant, and then he asked me if one was in a line with the other and all in a row, or if they were in a triangle.
"My boy is well-built. He has learned to recognize many constellations and basic shapes in geometry. He applies his knowledge effectively, for example, by drawing the positions of the stars along with their constellations. Last winter in the countryside, seeing Jupiter, he asked, 'How can we see him from here just like from the town? He must be really far away.' He also asked me to describe three different places he'd been to in just one word. I didn’t understand what he meant, and then he asked me if they were lined up in a row or if they formed a triangle."
“He enjoys cutting paper figures with a pair of scissors, and without my ever having told him about triangles remarked that a right-angled triangle which he had cut out was half of an oblong. I exercise his body with care, he can dig well in the earth with his little hands. The blossom can fall and no fruit left. When he is fifteen I want to send him to you to be your pupil.”
“He loves cutting out paper shapes with scissors, and without me ever mentioning triangles, he pointed out that a right-angled triangle he had cut out was half of a rectangle. I take good care of his physical health; he can dig in the dirt really well with his tiny hands. The blossom can fall and no fruit remains. When he turns fifteen, I want to send him to you to be your student.”
In Johann’s autobiography he says:—
In Johann’s autobiography, he states:—
“My father called my attention to the imperfections and gaps in the theory of parallels. He told me he had gained more satisfactory results than his predecessors, but had obtained no perfect and satisfying conclusion. None of his assumptions had the necessary degree of geometrical certainty, although they sufficed to prove the eleventh axiom and appeared acceptable on first sight.
“My father pointed out the flaws and gaps in the theory of parallels. He told me he had achieved better results than those before him, but had not reached any perfect or satisfying conclusion. None of his assumptions had the required level of geometrical certainty, though they were enough to prove the eleventh axiom and seemed acceptable at first glance."
“He begged of me, anxious not without a reason, to hold myself aloof and to shun all investigation on this subject, if I did not wish to live all my life in vain.”
“He pleaded with me, clearly nervous for a reason, to keep my distance and avoid any inquiry into this topic, if I didn't want to waste my entire life.”
Johann, in the failure of his father to obtain any response from Gauss, in answer to a letter in which he asked the great mathematician to make of his son “an apostle of truth in a far land,” entered the Engineering School at Vienna. He writes from Temesvar, where he was appointed sub-lieutenant September, 1823:—
Johann, frustrated by his father's lack of response from Gauss after he requested the great mathematician to make his son “an apostle of truth in a far land,” enrolled in the Engineering School in Vienna. He writes from Temesvar, where he was appointed sub-lieutenant in September 1823:—
“Temesvar, November 3rd, 1823.
"Temesvar, November 3, 1823."
“Dear Good Father,
“Dear Good Father,”
“I have so overwhelmingly much to write about my discovery that I know no other way of checking myself than taking a quarter of a sheet only to write on. I want an answer to my four-sheet letter.
“I have so much to say about my discovery that I don't know how to rein myself in except to use just a quarter of a sheet to write on. I want a response to my four-sheet letter."
[Pg 44]
[Pg 44]
“I am unbroken in my determination to publish a work on Parallels, as soon as I have put my material in order and have the means.
“I am unwavering in my commitment to publish a work on Parallels, as soon as I have organized my material and have the resources.”
“At present I have not made any discovery, but the way I have followed almost certainly promises me the attainment of my object if any possibility of it exists.
“At the moment, I haven’t made any discoveries, but the path I’m on almost definitely holds the promise of achieving my goal if there’s any chance of it.”
“I have not got my object yet, but I have produced such stupendous things that I was overwhelmed myself, and it would be an eternal shame if they were lost. When you see them you will find that it is so. Now I can only say that I have made a new world out of nothing. Everything that I have sent you before is a house of cards in comparison with a tower. I am convinced that it will be no less to my honour than if I had already discovered it.”
“I haven't gotten what I wanted yet, but I've created such incredible things that I'm amazed myself, and it would be a huge shame if they were lost. When you see them, you'll understand what I mean. All I can say now is that I've built a new world from nothing. Everything I've sent you before is just a house of cards compared to a tower. I'm sure it will bring me as much honor as if I had already discovered it.”
The discovery of which Johann here speaks was published as an appendix to Wolfgang Bolyai’s Tentamen.
The discovery that Johann is talking about was published as an appendix to Wolfgang Bolyai’s Tentamen.
Sending the book to Gauss, Wolfgang writes, after an interruption of eighteen years in his correspondence:—
Sending the book to Gauss, Wolfgang writes after an eighteen-year break in their correspondence:—
“My son is first lieutenant of Engineers and will soon be captain. He is a fine youth, a good violin player, a skilful fencer, and brave, but has had many duels, and is wild even for a soldier. Yet he is distinguished—light in darkness and darkness in light. He is an impassioned mathematician with extraordinary capacities.... He will think more of your judgment on his work than that of all Europe.”
“My son is a first lieutenant in the Engineers and will soon be promoted to captain. He’s a great young man, an excellent violinist, a skilled fencer, and very brave, but he’s been in a lot of duels and is quite wild, even for a soldier. Still, he stands out—bringing light in dark times and darkness in bright ones. He’s a passionate mathematician with exceptional abilities... He values your opinion on his work more than that of all of Europe.”
Wolfgang received no answer from Gauss to this letter, but sending a second copy of the book received the following reply:—
Wolfgang didn't get a response from Gauss to this letter, but after sending a second copy of the book, he received the following reply:—
“You have rejoiced me, my unforgotten friend, by your letters. I delayed answering the first because I wanted to wait for the arrival of the promised little book.
“You have made me really happy, my unforgettable friend, with your letters. I put off replying to the first one because I wanted to wait for the arrival of the promised little book.
“Now something about your son’s work.
“Now, let’s talk about your son’s work.
[Pg 45]
[Pg 45]
“If I begin with saying that ‘I ought not to praise it,’ you will be staggered for a moment. But I cannot say anything else. To praise it is to praise myself, for the path your son has broken in upon and the results to which he has been led are almost exactly the same as my own reflections, some of which date from thirty to thirty-five years ago.
“If I start by saying that ‘I shouldn’t praise it,’ you might be shocked for a second. But I can’t say anything else. Praising it is like praising myself because the path your son has taken and the conclusions he has drawn are almost exactly the same as my own thoughts, some of which go back thirty to thirty-five years.”
“In fact I am astonished to the uttermost. My intention was to let nothing be known in my lifetime about my own work, of which, for the rest, but little is committed to writing. Most people have but little perception of the problem, and I have found very few who took any interest in the views I expressed to them. To be able to do that one must first of all have had a real live feeling of what is wanting, and as to that most men are completely in the dark.
“In fact, I’m completely astonished. My goal was to keep my work hidden during my lifetime, and, for the most part, only a little of it is actually written down. Most people have little understanding of the issue, and I’ve found very few who showed any interest in the ideas I shared with them. To do that, one must first have a genuine, living sense of what’s lacking, and when it comes to that, most people are totally in the dark."
“Still it was my intention to commit everything to writing in the course of time, so that at least it should not perish with me.
“Still, I intended to write everything down eventually, so that at least it wouldn’t be lost with me.”
“I am deeply surprised that this task can be spared me, and I am most of all pleased in this that it is the son of my old friend who has in so remarkable a manner preceded me.”
“I’m really surprised that I can be excused from this task, and what makes me happiest is that it’s the son of my old friend who has so impressively gone before me.”
The impression which we receive from Gauss’s inexplicable silence towards his old friend is swept away by this letter. Hence we breathe the clear air of the mountain tops. Gauss would not have failed to perceive the vast significance of his thoughts, sure to be all the greater in their effect on future ages from the want of comprehension of the present. Yet there is not a word or a sign in his writing to claim the thought for himself. He published no single line on the subject. By the measure of what he thus silently relinquishes, by such a measure of a world-transforming thought, we can appreciate his greatness.
The impression we get from Gauss’s puzzling silence towards his old friend is cleared up by this letter. Now we can breathe the fresh air of the mountain tops. Gauss surely recognized the immense importance of his thoughts, which would only become more significant for future generations due to their lack of understanding in the present. Yet there’s not a single word or hint in his writing to take credit for the idea. He didn’t publish a single line on the topic. By the scale of what he silently gave up, by the magnitude of a world-changing thought, we can truly understand his greatness.
[Pg 46]
[Pg 46]
It is a long step from Gauss’s serenity to the disturbed and passionate life of Johann Bolyai—he and Galois, the two most interesting figures in the history of mathematics. For Bolyai, the wild soldier, the duellist, fell at odds with the world. It is related of him that he was challenged by thirteen officers of his garrison, a thing not unlikely to happen considering how differently he thought from every one else. He fought them all in succession—making it his only condition that he should be allowed to play on his violin for an interval between meeting each opponent. He disarmed or wounded all his antagonists. It can be easily imagined that a temperament such as his was one not congenial to his military superiors. He was retired in 1833.
It’s a huge leap from Gauss’s calmness to the tumultuous and passionate life of Johann Bolyai—he and Galois are the two most fascinating figures in the history of mathematics. Bolyai, the wild soldier and duelist, was at odds with the world. It’s said that he was challenged by thirteen officers from his unit, which isn’t surprising given how differently he viewed things compared to everyone else. He fought them all one after another—his only condition was that he could play his violin for a bit between matches. He either disarmed or injured all his opponents. One can easily imagine that a personality like his wouldn’t sit well with his military superiors. He was retired in 1833.
His epoch-making discovery awoke no attention. He seems to have conceived the idea that his father had betrayed him in some inexplicable way by his communications with Gauss, and he challenged the excellent Wolfgang to a duel. He passed his life in poverty, many a time, says his biographer, seeking to snatch himself from dissipation and apply himself again to mathematics. But his efforts had no result. He died January 27th, 1860, fallen out with the world and with himself.
His groundbreaking discovery went unnoticed. He seemed to believe that his father had somehow betrayed him through his conversations with Gauss, leading him to challenge the accomplished Wolfgang to a duel. He lived in poverty, often trying, as his biographer notes, to pull himself away from a life of excess and refocus on mathematics. But his attempts were in vain. He died on January 27th, 1860, alienated from the world and from himself.
Metageometry
The theories which are generally connected with the names of Lobatchewsky and Bolyai bear a singular and curious relation to the subject of higher space.
The theories usually associated with the names of Lobatchewsky and Bolyai have a unique and interesting connection to the topic of higher dimensions.
In order to show what this relation is, I must ask the reader to be at the pains to count carefully the sets of points by which I shall estimate the volumes of certain figures.
To explain this relationship, I need the reader to take the time to carefully count the sets of points that I'll use to estimate the volumes of specific figures.
[Pg 47]
[Pg 47]
No mathematical processes beyond this simple one of counting will be necessary.
No mathematical processes beyond this simple act of counting will be required.

Let us suppose we have before us in fig. 19 a plane covered with points at regular intervals, so placed that every four determine a square.
Let’s say we have in fig. 19 a flat surface filled with dots at regular intervals, arranged so that every four points can form a square.
Now it is evident that as four points determine a square, so four squares meet in a point.
Now it's clear that just as four points define a square, four squares meet at a point.

Thus, considering a point inside a square as belonging to it, we may say that a point on the corner of a square belongs to it and to three others equally: belongs a quarter of it to each square.
Thus, if we consider a point within a square as part of it, we can say that a point located at a corner of a square is part of that square and also three others equally: it belongs a quarter of the area to each square.
Thus the square ACDE (fig. 21) contains one point, and has four points at the four corners. Since one-fourth of each of these four belongs to the square, the four together count as one point, and the point value of the square is two points—the one inside and the four at the corner make two points belonging to it exclusively.
Thus the square ACDE (fig. 21) contains one point and has four points at the corners. Since one-fourth of each of these four points belongs to the square, together they count as one point. So, the total point value of the square is two points—the one inside and the four at the corners make two points that belong to it exclusively.


Now the area of this square is two unit squares, as can be seen by drawing two diagonals in fig. 22.
Now the area of this square is two unit squares, as you can see by drawing two diagonals in fig. 22.
We also notice that the square in question is equal to the sum of the squares on the sides AB, BC, of the right-angled triangle ABC. Thus we recognise the proposition that the square on the hypothenuse is equal to the sum of the squares on the two sides of a right-angled triangle.
We also see that the square in question is equal to the sum of the squares on the sides AB and BC of the right-angled triangle ABC. Therefore, we acknowledge the principle that the square on the hypotenuse is equal to the sum of the squares on the two sides of a right-angled triangle.
Now suppose we set ourselves the question of determining the whereabouts in the ordered system of points,[Pg 48] the end of a line would come when it turned about a point keeping one extremity fixed at the point.
Now let's ask ourselves where, in the organized system of points,[Pg 48] the end of a line would land if it rotated around a point while keeping one end fixed at that point.
We can solve this problem in a particular case. If we can find a square lying slantwise amongst the dots which is equal to one which goes regularly, we shall know that the two sides are equal, and that the slanting side is equal to the straight-way side. Thus the volume and shape of a figure remaining unchanged will be the test of its having rotated about the point, so that we can say that its side in its first position would turn into its side in the second position.
We can solve this problem in a specific case. If we can find a square tilted among the dots that is equal to one that is oriented normally, we will know that the two sides are equal, and that the tilted side is equal to the straight side. Therefore, the volume and shape of a figure staying the same will be the test of its rotation around that point, allowing us to say that its side in the first position would become its side in the second position.
Now, such a square can be found in the one whose side is five units in length.
Now, you can find a square whose side is five units long.

| 9 points interior | 9 |
| 4 at the corners | 1 |
| 4 sides with 3 on each side, considered as 1½ on each side, because belonging equally to two squares | 6 |
The total is 16. There are 9 points in the square on BC.
The total is 16. There are 9 points in the square on BC.
[Pg 49]
[Pg 49]
In the square on AC there are—
In the square on AC there are—
| 24 points inside | 24 |
| 4 at the corners | 1 |
or 25 altogether.
or 25 in total.
Hence we see again that the square on the hypothenuse is equal to the squares on the sides.
Hence we see again that the square on the hypotenuse is equal to the squares on the sides.
Now take the square AFHG, which is larger than the square on AB. It contains 25 points.
Now take the square AFHG, which is larger than the square on AB. It contains 25 points.
| 16 inside | 16 |
| 16 on the sides, counting as | 8 |
| 4 on the corners | 1 |
making 25 altogether.
making 25 in total.
If two squares are equal we conclude the sides are equal. Hence, the line AF turning round A would move so that it would after a certain turning coincide with AC.
If two squares are equal, we conclude that their sides are equal. Therefore, the line AF, rotating around A, would move in such a way that after a certain rotation, it would line up with AC.
This is preliminary, but it involves all the mathematical difficulties that will present themselves.
This is just the beginning, but it includes all the mathematical challenges that will come up.
There are two alterations of a body by which its volume is not changed.
There are two ways a body can be altered without changing its volume.
One is the one we have just considered, rotation, the other is what is called shear.
One is the one we just looked at, rotation; the other is what's called shear.
Consider a book, or heap of loose pages. They can be slid so that each one slips over the preceding one, and the whole assumes the shape b in fig. 24.
Consider a book or a stack of loose pages. They can be arranged so that each one slides over the one before it, and the whole takes on the shape b in fig. 24.

This deformation is not shear alone, but shear accompanied by rotation.
This deformation isn't just shear; it's shear combined with rotation.
Shear can be considered as produced in another way.
Shear can be thought of as created in a different way.
[Pg 50]
[Pg 50]
This compression and expansion along two lines at right angles is what is called shear; it is equivalent to the sliding illustrated above, combined with a turning round.
This squeezing and stretching along two lines that meet at a right angle is referred to as shear; it’s like the sliding shown above, mixed with a twisting motion.

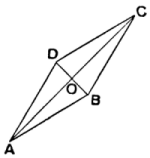
In pure shear a body is compressed and extended in two directions at right angles to each other, so that its volume remains unchanged.
In pure shear, a body is compressed and stretched in two directions at right angles to each other, so its volume stays the same.
Now we know that our material bodies resist shear—shear does violence to the internal arrangement of their particles, but they turn as wholes without such internal resistance.
Now we know that our physical bodies resist shear—shear disrupts the internal arrangement of their particles, but they move as a whole without that internal resistance.
But there is an exception. In a liquid shear and rotation take place equally easily, there is no more resistance against a shear than there is against a rotation.
But there is an exception. In a liquid, shear and rotation happen just as easily; there's no more resistance to shear than there is to rotation.
Now, suppose all bodies were to be reduced to the liquid state, in which they yield to shear and to rotation equally easily, and then were to be reconstructed as solids, but in such a way that shear and rotation had interchanged places.
Now, imagine if all objects were turned into a liquid state, where they respond to shear and rotation with equal ease, and then were reformed as solids, but in a way that shear and rotation swapped their roles.
That is to say, let us suppose that when they had become solids again they would shear without offering any internal resistance, but a rotation would do violence to their internal arrangement.
That is to say, let's assume that when they solidified again they would slide past each other without putting up any internal resistance, but spinning would disrupt their internal structure.
That is, we should have a world in which shear would have taken the place of rotation.
That is, we should have a world where shear has replaced rotation.
[Pg 51]
[Pg 51]
A shear does not alter the volume of a body: thus an inhabitant living in such a world would look on a body sheared as we look on a body rotated. He would say that it was of the same shape, but had turned a bit round.
A shear doesn't change the volume of a body: so, someone living in such a world would view a sheared body the same way we see a rotated body. They would say it has the same shape but has been turned a little.
Let us imagine a Pythagoras in this world going to work to investigate, as is his wont.
Let’s picture a Pythagoras in today’s world heading to work to explore, as he usually does.

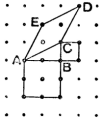
Fig. 27 represents a square unsheared. Fig. 28 represents a square sheared. It is not the figure into which the square in fig. 27 would turn, but the result of shear on some square not drawn. It is a simple slanting placed figure, taken now as we took a simple slanting placed square before. Now, since bodies in this world of shear offer no internal resistance to shearing, and keep their volume when sheared, an inhabitant accustomed to them would not consider that they altered their shape under shear. He would call ACDE as much a square as the square in fig. 27. We will call such figures shear squares. Counting the dots in ACDE, we find—
Fig. 27 shows an unsheared square. Fig. 28 shows a sheared square. It's not the shape that the square in fig. 27 would become, but rather the outcome of shearing a different square that isn't illustrated. It’s a straightforward slanted figure, just like the simple slanted square we looked at before. Since objects in this shearing world don’t offer any internal resistance to shearing and maintain their volume when sheared, someone used to these shapes wouldn't think their form changed during shear. They would think of ACDE as equally a square as the one in fig. 27. We'll refer to these shapes as shear squares. By counting the dots in ACDE, we find—
| 2 inside | = | 2 |
| 4 at corners | = | 1 |
or a total of 3.
or a total of 3.
Now, the square on the side AB has 4 points, that on BC has 1 point. Here the shear square on the hypothenuse has not 5 points but 3; it is not the sum of the squares on the sides, but the difference.
Now, the square on the side AB has 4 points, while the one on BCE has 1 point. Here, the shear square on the hypotenuse has not 5 points but 3; it's not the sum of the squares on the sides, but the difference.
[Pg 52]
[Pg 52]

Shear square on hypothenuse—
Square on hypotenuse—
| 7 internal | 7 |
| 4 at corners | 1 |
| 8 |

Square on one side—which the reader can draw for himself—
Square on one side—which the reader can sketch for themselves—
| 4 internal | 4 |
| 8 on sides | 4 |
| 4 at corners | 1 |
| 9 |
and the square on the other side is 1. Hence in this case again the difference is equal to the shear square on the hypothenuse, 9 - 1 = 8.
and the square on the other side is 1. So in this case, once again the difference is equal to the shear square on the hypotenuse, 9 - 1 = 8.
Thus in a world of shear the square on the hypothenuse would be equal to the difference of the squares on the sides of a right-angled triangle.
Thus in a world of shear, the square on the hypotenuse would be equal to the difference of the squares on the sides of a right-angled triangle.
In fig. 29 bis another shear square is drawn on which the above relation can be tested.
In fig. 29 bis, another shear square is drawn where the relation mentioned above can be tested.
What now would be the position a line on turning by shear would take up?
What would be the position of a line when it turns due to shear?
We must settle this in the same way as previously with our turning.
We need to resolve this just like we did before with our turning.
Since a body sheared remains the same, we must find two equal bodies, one in the straight way, one in the slanting way, which have the same volume. Then the side of one will by turning become the side of the other, for the two figures are each what the other becomes by a shear turning.
Since a sheared body remains the same, we need to find two equal bodies: one that is straight and one that is slanted, which have the same volume. Then the side of one will, by rotating, become the side of the other, because the two shapes are each what the other turns into through a shear rotation.
[Pg 53]
[Pg 53]
We can solve the problem in a particular case—
We can solve the problem in a specific situation—

In the figure ACDE (fig. 30) there are—
In the figure ACDE (__A_TAG_PLACEHOLDER_0__) there are—
| 15 inside | 15 |
| 4 at corners | 1 |
a total of 16.
a total of 16.
Now in the square ABGF, there are 16—
Now in the square ABGF, there are 16—
| 9 inside | 9 |
| 12 on sides | 6 |
| 4 at corners | 1 |
| 16 |
Hence the square on AB would, by the shear turning, become the shear square ACDE.
Hence the square on AB would, by the sheer turning, become the sheer square ACDE.
And hence the inhabitant of this world would say that the line AB turned into the line AC. These two lines would be to him two lines of equal length, one turned a little way round from the other.
And so, the person living in this world would say that the line AB became the line AC. To them, these two lines would be two lines of equal length, one slightly rotated compared to the other.
That is, putting shear in place of rotation, we get a different kind of figure, as the result of the shear rotation, from what we got with our ordinary rotation. And as a consequence we get a position for the end of a line of invariable length when it turns by the shear rotation, different from the position which it would assume on turning by our rotation.
That is, replacing rotation with shear, we get a different type of shape as a result of the shear rotation compared to what we obtained with regular rotation. Consequently, we find a position for the end of a line of fixed length when it turns by the shear rotation, which is different from the position it would take when turning with our regular rotation.
A real material rod in the shear world would, on turning about A, pass from the position AB to the position AC. We say that its length alters when it becomes AC, but this transformation of AB would seem to an inhabitant of the shear world like a turning of AB without altering in length.
A real material rod in the shear world would, when turning around A, move from position AB to position AC. We say that its length changes when it becomes AC, but this transformation of AB would appear to someone from the shear world as just a rotation of AB without any change in length.
If now we suppose a communication of ideas that takes place between one of ourselves and an inhabitant of the[Pg 54] shear world, there would evidently be a difference between his views of distance and ours.
If we imagine a conversation happening between one of us and a person from the[Pg 54] shear world, it’s clear that their perceptions of distance would be different from ours.
We should say that his line AB increased in length in turning to AC. He would say that our line AF (fig. 23) decreased in length in turning to AC. He would think that what we called an equal line was in reality a shorter one.
We should note that his line AB got longer when turning to AC. He would argue that our line AF (fig. 23) got shorter when turning to AC. He would believe that what we considered an equal line was actually a shorter one.
We should say that a rod turning round would have its extremities in the positions we call at equal distances. So would he—but the positions would be different. He could, like us, appeal to the properties of matter. His rod to him alters as little as ours does to us.
We can say that a rod rotating would have its ends in locations we describe as equidistant. So would he—but those locations would be different. He could, like us, refer to the properties of matter. His rod changes for him just as little as ours does for us.
Now, is there any standard to which we could appeal, to say which of the two is right in this argument? There is no standard.
Now, is there any standard we could refer to in order to determine which of the two is correct in this argument? There is no standard.
We should say that, with a change of position, the configuration and shape of his objects altered. He would say that the configuration and shape of our objects altered in what we called merely a change of position. Hence distance independent of position is inconceivable, or practically distance is solely a property of matter.
We should note that changing the position of his objects changed their configuration and shape. He would argue that our objects’ configuration and shape also changed with what we referred to simply as a change in position. Therefore, distance that exists independently of position is unimaginable, or essentially, distance is only a characteristic of matter.
There is no principle to which either party in this controversy could appeal. There is nothing to connect the definition of distance with our ideas rather than with his, except the behaviour of an actual piece of matter.
There’s no principle that either side in this dispute can refer to. There’s nothing linking the definition of distance to our ideas instead of his, except for how a real piece of matter acts.
For the study of the processes which go on in our world the definition of distance given by taking the sum of the squares is of paramount importance to us. But as a question of pure space without making any unnecessary assumptions the shear world is just as possible and just as interesting as our world.
For studying the processes happening in our world, the definition of distance, based on the sum of the squares, is extremely important to us. However, when considering pure space without any unnecessary assumptions, the sheer concept of other worlds is just as possible and just as fascinating as our own.
It was the geometry of such conceivable worlds that Lobatchewsky and Bolyai studied.
It was the geometry of these imagined worlds that Lobatchewsky and Bolyai explored.
This kind of geometry has evidently nothing to do directly with four-dimensional space.
This type of geometry clearly has nothing to do directly with four-dimensional space.
[Pg 55]
[Pg 55]
But a connection arises in this way. It is evident that, instead of taking a simple shear as I have done, and defining it as that change of the arrangement of the particles of a solid which they will undergo without offering any resistance due to their mutual action, I might take a complex motion, composed of a shear and a rotation together, or some other kind of deformation.
But a connection comes about in this way. It’s clear that, instead of using a simple shear as I have, and defining it as the change in the arrangement of the particles of a solid that happens without any resistance from their interaction, I could use a complex motion that combines a shear and a rotation, or some other form of deformation.
Let us suppose such an alteration picked out and defined as the one which means simple rotation, then the type, according to which all bodies will alter by this rotation, is fixed.
Let’s assume that such a change is identified and defined as one that represents a straightforward rotation; then the way all objects will change due to this rotation is established.
Looking at the movements of this kind, we should say that the objects were altering their shape as well as rotating. But to the inhabitants of that world they would seem to be unaltered, and our figures in their motions would seem to them to alter.
Looking at these kinds of movements, we would say that the objects were changing their shape as well as rotating. But to the people living in that world, they would appear unchanged, and our figures in their motions would seem to them to be altering.
In such a world the features of geometry are different. We have seen one such difference in the case of our illustration of the world of shear, where the square on the hypothenuse was equal to the difference, not the sum, of the squares on the sides.
In this kind of world, the characteristics of geometry are different. We've observed one such difference in our example of the world of shear, where the square on the hypotenuse equals the difference, not the sum, of the squares on the sides.
In our illustration we have the same laws of parallel lines as in our ordinary rotation world, but in general the laws of parallel lines are different.
In our illustration, we have the same laws of parallel lines as in our usual rotating world, but overall, the laws of parallel lines are different.
In one of these worlds of a different constitution of matter through one point there can be two parallels to a given line, in another of them there can be none, that is, although a line be drawn parallel to another it will meet it after a time.
In one of these worlds with a different arrangement of matter, it's possible for two parallel lines to exist in relation to a given line. In another world, however, that's not the case; even if a line is drawn parallel to another, it will eventually intersect it.
Now it was precisely in this respect of parallels that Lobatchewsky and Bolyai discovered these different worlds. They did not think of them as worlds of matter, but they discovered that space did not necessarily mean that our law of parallels is true. They made the distinction between laws of space and laws of matter,[Pg 56] although that is not the form in which they stated their results.
Now, it was specifically in the area of parallels that Lobatchewsky and Bolyai uncovered these different realities. They didn’t view them as physical worlds, but they realized that space didn't necessarily mean our law of parallels was accurate. They recognized the difference between the laws of space and the laws of matter,[Pg 56] even though that isn’t exactly how they expressed their findings.
The way in which they were led to these results was the following. Euclid had stated the existence of parallel lines as a postulate—putting frankly this unproved proposition—that one line and only one parallel to a given straight line can be drawn, as a demand, as something that must be assumed. The words of his ninth postulate are these: “If a straight line meeting two other straight lines makes the interior angles on the same side of it equal to two right angles, the two straight lines will never meet.”
The way they arrived at these conclusions was as follows. Euclid had declared the existence of parallel lines as a postulate—stating this unproven idea directly—asserting that one and only one line parallel to a given straight line can be drawn, as a requirement, something that must be taken for granted. The wording of his ninth postulate is: “If a straight line that crosses two other straight lines creates interior angles on the same side that equal two right angles, the two straight lines will never intersect.”
The mathematicians of later ages did not like this bald assumption, and not being able to prove the proposition they called it an axiom—the eleventh axiom.
The mathematicians of later times didn't agree with this straightforward assumption, and since they couldn't prove the proposition, they labeled it an axiom—the eleventh axiom.
Many attempts were made to prove the axiom; no one doubted of its truth, but no means could be found to demonstrate it. At last an Italian, Sacchieri, unable to find a proof, said: “Let us suppose it not true.” He deduced the results of there being possibly two parallels to one given line through a given point, but feeling the waters too deep for the human reason, he devoted the latter half of his book to disproving what he had assumed in the first part.
Many attempts were made to prove the axiom; no one doubted its truth, but no one could find a way to demonstrate it. Finally, an Italian named Sacchieri, unable to find a proof, said, “Let’s assume it’s not true.” He reasoned the consequences of possibly having two parallels to one given line through a specific point, but feeling the topic was too complex for human understanding, he dedicated the second half of his book to disproving what he had assumed in the first part.
Then Bolyai and Lobatchewsky with firm step entered on the forbidden path. There can be no greater evidence of the indomitable nature of the human spirit, or of its manifest destiny to conquer all those limitations which bind it down within the sphere of sense than this grand assertion of Bolyai and Lobatchewsky.
Then Bolyai and Lobatchewsky confidently stepped onto the forbidden path. There is no clearer evidence of the unwavering nature of the human spirit, or of its destined journey to overcome all the limitations that hold it within the realm of the senses, than this bold declaration from Bolyai and Lobatchewsky.

Take a line AB and a point C. We say and see and know that through C can only be drawn one line parallel to AB.
Take a line AB and a point C. We say, see, and know that only one line can be drawn through C that is parallel to AB.
But Bolyai said: “I will draw two.” Let CD be parallel[Pg 57] to AB, that is, not meet AB however far produced, and let lines beyond CD also not meet AB; let there be a certain region between CD and CE, in which no line drawn meets AB. CE and CD produced backwards through C will give a similar region on the other side of C.
But Bolyai said: “I will draw two.” Let CD be parallel[Pg 57] to AB, meaning it won’t intersect AB, no matter how far extended, and let lines beyond CD also not intersect AB; there should be a certain area between CD and CE, where no line drawn will intersect AB. When CE and CD are extended backwards through C, it will create a similar area on the other side of C.

Nothing so triumphantly, one may almost say so insolently, ignoring of sense had ever been written before. Men had struggled against the limitations of the body, fought them, despised them, conquered them. But no one had ever thought simply as if the body, the bodily eyes, the organs of vision, all this vast experience of space, had never existed. The age-long contest of the soul with the body, the struggle for mastery, had come to a culmination. Bolyai and Lobatchewsky simply thought as if the body was not. The struggle for dominion, the strife and combat of the soul were over; they had mastered, and the Hungarian drew his line.
Nothing so triumphantly, or you could even say so arrogantly, dismissing common sense had ever been written before. People had fought against the limits of the body, battled them, looked down on them, and overcome them. But no one had ever thought as if the body, the physical eyes, the organs of sight, and all this vast experience of space didn't exist. The age-old struggle of the soul against the body, the fight for control, had reached a peak. Bolyai and Lobatchewsky simply thought as if the body didn’t matter. The fight for power, the conflict and struggle of the soul were finished; they had overcome, and the Hungarian drew his line.
Can we point out any connection, as in the case of Parmenides, between these speculations and higher space? Can we suppose it was any inner perception by the soul of a motion not known to the senses, which resulted in this theory so free from the bonds of sense? No such supposition appears to be possible.
Can we identify any link, like in the case of Parmenides, between these ideas and higher space? Could we suggest it was some inner awareness by the soul of a movement that senses can’t detect, which led to this theory so unrestrained by sensory experience? That kind of assumption doesn’t seem feasible.
Practically, however, metageometry had a great influence in bringing the higher space to the front as a working hypothesis. This can be traced to the tendency the mind has to move in the direction of least resistance. The results of the new geometry could not be neglected, the problem of parallels had occupied a place too prominent in the development of mathematical thought for its final solution to be neglected. But this utter independence of all mechanical considerations, this perfect cutting loose[Pg 58] from the familiar intuitions, was so difficult that almost any other hypothesis was more easy of acceptance, and when Beltrami showed that the geometry of Lobatchewsky and Bolyai was the geometry of shortest lines drawn on certain curved surfaces, the ordinary definitions of measurement being retained, attention was drawn to the theory of a higher space. An illustration of Beltrami’s theory is furnished by the simple consideration of hypothetical beings living on a spherical surface.
Practically, though, metageometry had a significant impact on bringing higher dimensions into play as a working idea. This can be traced back to how our minds tend to follow the path of least resistance. The results from this new geometry couldn’t be ignored; the issue of parallels had been too important in the evolution of mathematical thinking for its final solution to be overlooked. However, this complete independence from all mechanical considerations, this total break from familiar intuitions, was so challenging that nearly any other idea was easier to accept. When Beltrami demonstrated that the geometries of Lobatchewsky and Bolyai represented the shortest lines on certain curved surfaces while keeping the usual definitions of measurement, it sparked interest in the concept of higher dimensions. An example of Beltrami’s theory can be seen in the simple idea of hypothetical beings living on a spherical surface.[Pg 58]

Let ABCD be the equator of a globe, and AP, BP, meridian lines drawn to the pole, P. The lines AB, AP, BP would seem to be perfectly straight to a person moving on the surface of the sphere, and unconscious of its curvature. Now AP and BP both make right angles with AB. Hence they satisfy the definition of parallels. Yet they meet in P. Hence a being living on a spherical surface, and unconscious of its curvature, would find that parallel lines would meet. He would also find that the angles in a triangle were greater than two right angles. In the triangle PAB, for instance, the angles at A and B are right angles, so the three angles of the triangle PAB are greater than two right angles.
Let ABCD be the equator of a globe, and AP, BP, meridian lines drawn to the pole, P. The lines AB, AP, BP would seem perfectly straight to someone moving on the surface of the sphere, unaware of its curvature. Now AP and BP both form right angles with AB. Thus, they fit the definition of parallel lines. Yet they intersect at P. Therefore, a being living on a spherical surface, not knowing about its curvature, would discover that parallel lines intersect. They would also find that the angles in a triangle are more than two right angles. In the triangle PAB, for example, the angles at A and B are right angles, making the three angles of triangle PAB greater than two right angles.
Now in one of the systems of metageometry (for after Lobatchewsky had shown the way it was found that other systems were possible besides his) the angles of a triangle are greater than two right angles.
Now in one of the systems of metageometry (because after Lobatchewsky demonstrated the concept, it was discovered that other systems were possible beyond his) the angles of a triangle are greater than two right angles.
Thus a being on a sphere would form conclusions about his space which are the same as he would form if he lived on a plane, the matter in which had such properties as are presupposed by one of these systems of geometry. Beltrami also discovered a certain surface on which there could be drawn more than one “straight” line through a[Pg 59] point which would not meet another given line. I use the word straight as equivalent to the line having the property of giving the shortest path between any two points on it. Hence, without giving up the ordinary methods of measurement, it was possible to find conditions in which a plane being would necessarily have an experience corresponding to Lobatchewsky’s geometry. And by the consideration of a higher space, and a solid curved in such a higher space, it was possible to account for a similar experience in a space of three dimensions.
So, a being on a sphere would draw conclusions about their space that are the same as what they would conclude if they lived on a flat plane, assuming the matter had the properties defined by these geometric systems. Beltrami also found a surface where more than one "straight" line could be drawn through a[Pg 59] point that wouldn't intersect another given line. I use the word straight to mean a line that represents the shortest distance between any two points on it. Therefore, without abandoning standard measurement methods, it was possible to identify conditions under which a being on a plane would have an experience that matched Lobatchewsky’s geometry. Additionally, by considering a higher-dimensional space and a solid curved in that higher space, it was feasible to explain a similar experience in three-dimensional space.
Now, it is far more easy to conceive of a higher dimensionality to space than to imagine that a rod in rotating does not move so that its end describes a circle. Hence, a logical conception having been found harder than that of a four dimensional space, thought turned to the latter as a simple explanation of the possibilities to which Lobatchewsky had awakened it. Thinkers became accustomed to deal with the geometry of higher space—it was Kant, says Veronese, who first used the expression of “different spaces”—and with familiarity the inevitableness of the conception made itself felt.
Now, it's much easier to understand the idea of higher dimensions in space than to picture a rotating rod that doesn’t move in such a way that its end traces a circle. Therefore, since grasping a logical concept proved to be tougher than envisioning four-dimensional space, thoughts shifted to the latter as a straightforward explanation of the possibilities Lobatchewsky had introduced. Thinkers became used to working with the geometry of higher dimensions—it was Kant, according to Veronese, who first coined the term "different spaces"—and with that familiarity, the necessity of the concept became evident.
From this point it is but a small step to adapt the ordinary mechanical conceptions to a higher spatial existence, and then the recognition of its objective existence could be delayed no longer. Here, too, as in so many cases, it turns out that the order and connection of our ideas is the order and connection of things.
From this point, it’s just a small leap to adjust the usual mechanical ideas to a higher spatial reality, and then acknowledging its objective existence can’t be postponed any longer. Here, like in so many situations, it becomes clear that the arrangement and connection of our thoughts reflects the arrangement and connection of things.
What is the significance of Lobatchewsky’s and Bolyai’s work?
What is the importance of Lobatchewsky’s and Bolyai’s work?
It must be recognised as something totally different from the conception of a higher space; it is applicable to spaces of any number of dimensions. By immersing the conception of distance in matter to which it properly belongs, it promises to be of the greatest aid in analysis for the effective distance of any two particles is the[Pg 60] product of complex material conditions and cannot be measured by hard and fast rules. Its ultimate significance is altogether unknown. It is a cutting loose from the bonds of sense, not coincident with the recognition of a higher dimensionality, but indirectly contributory thereto.
It needs to be seen as something completely different from the idea of a higher space; it applies to spaces of any number of dimensions. By grounding the concept of distance in the matter it truly relates to, it promises to be immensely helpful in analysis since the effective distance between any two particles is the[Pg 60] result of complex material conditions and can't be measured by strict rules. Its ultimate significance is entirely unknown. It represents a break from the limits of perception, not directly linked to the acknowledgment of a higher dimensionality, but still contributing to it in an indirect way.
Thus, finally, we have come to accept what Plato held in the hollow of his hand; what Aristotle’s doctrine of the relativity of substance implies. The vast universe, too, has its higher, and in recognising it we find that the directing being within us no longer stands inevitably outside our systematic knowledge.
Thus, finally, we have come to accept what Plato held in the hollow of his hand; what Aristotle’s doctrine of the relativity of substance implies. The vast universe, too, has its higher levels, and by recognizing it, we find that the guiding presence within us no longer stands inevitably outside our organized understanding.
[Pg 61]
[Pg 61]
CHAPTER VI
THE HIGHER WORLD
It is indeed strange, the manner in which we must begin to think about the higher world.
It’s really odd how we need to start thinking about the higher world.
Those simplest objects analogous to those which are about us on every side in our daily experience such as a door, a table, a wheel are remote and uncognisable in the world of four dimensions, while the abstract ideas of rotation, stress and strain, elasticity into which analysis resolves the familiar elements of our daily experience are transferable and applicable with no difficulty whatever. Thus we are in the unwonted position of being obliged to construct the daily and habitual experience of a four-dimensional being, from a knowledge of the abstract theories of the space, the matter, the motion of it; instead of, as in our case, passing to the abstract theories from the richness of sensible things.
Those simplest objects similar to those around us in our everyday lives, like a door, a table, or a wheel, are distant and hard to grasp in the realm of four dimensions. Meanwhile, the abstract concepts of rotation, stress and strain, and elasticity that analysis breaks familiar elements of our daily experience into are easy to transfer and apply. Therefore, we find ourselves in the unusual position of having to build the everyday and routine experience of a four-dimensional being from an understanding of the abstract theories of space, matter, and motion, rather than the other way around, as we do, where we move from the richness of tangible things to the abstract theories.
What would a wheel be in four dimensions? What the shafting for the transmission of power which a four-dimensional being would use.
What would a wheel look like in four dimensions? What kind of mechanism would a four-dimensional being use to transfer power?
The four-dimensional wheel, and the four-dimensional shafting are what will occupy us for these few pages. And it is no futile or insignificant enquiry. For in the attempt to penetrate into the nature of the higher, to grasp within our ken that which transcends all analogies, because what we know are merely partial views of it, the purely material and physical path affords a means of approach[Pg 62] pursuing which we are in less likelihood of error than if we use the more frequently trodden path of framing conceptions which in their elevation and beauty seem to us ideally perfect.
The four-dimensional wheel and the four-dimensional shafting are what we'll focus on for the next few pages. This isn't a pointless or unimportant inquiry. As we try to understand the nature of the higher dimensions and grasp what goes beyond our usual analogies—since what we know is just incomplete views of it—the purely material and physical approach gives us a way in that is less likely to lead us astray than if we choose the more commonly taken route of creating ideas that seem ideally perfect in their grandeur and beauty.[Pg 62]
For where we are concerned with our own thoughts, the development of our own ideals, we are as it were on a curve, moving at any moment in a direction of tangency. Whither we go, what we set up and exalt as perfect, represents not the true trend of the curve, but our own direction at the present—a tendency conditioned by the past, and by a vital energy of motion essential but only true when perpetually modified. That eternal corrector of our aspirations and ideals, the material universe draws sublimely away from the simplest things we can touch or handle to the infinite depths of starry space, in one and all uninfluenced by what we think or feel, presenting unmoved fact to which, think it good or think it evil, we can but conform, yet out of all that impassivity with a reference to something beyond our individual hopes and fears supporting us and giving us our being.
When it comes to our own thoughts and the development of our ideals, we’re like we're on a curve, moving in a direction that seems to just touch it at any moment. Where we go and what we elevate as perfect doesn't truly reflect the curve's actual path; instead, it shows our current direction—a tendency shaped by the past and driven by a vital energy that is essential, yet only accurate when constantly adjusted. That constant corrector of our aspirations and ideals, the material universe, draws us magnificently from the simplest things we can touch to the infinite depths of starry space, unaffected by our thoughts or feelings, presenting us with unchanging facts to which, whether we view them positively or negatively, we can only adapt. Yet, from all that indifference, there's something beyond our individual hopes and fears that supports us and gives us our existence.
And to this great being we come with the question: “You, too, what is your higher?”
And to this great being, we come with the question: “You, too, what’s your higher?”
Or to put it in a form which will leave our conclusions in the shape of no barren formula, and attacking the problem on its most assailable side: “What is the wheel and the shafting of the four-dimensional mechanic?”
Or to express it in a way that keeps our conclusions from being just an empty formula, and tackling the problem from its most vulnerable angle: “What are the wheel and the shafting of the four-dimensional mechanic?”
In entering on this enquiry we must make a plan of procedure. The method which I shall adopt is to trace out the steps of reasoning by which a being confined to movement in a two-dimensional world could arrive at a conception of our turning and rotation, and then to apply an analogous process to the consideration of the higher movements. The plane being must be imagined as no abstract figure, but as a real body possessing all three[Pg 63] dimensions. His limitation to a plane must be the result of physical conditions.
In starting this investigation, we need to outline a plan. The approach I will take is to follow the reasoning steps that a being limited to movement in a two-dimensional world would use to understand our concepts of turning and rotation, and then apply a similar process to explore the more complex movements. The being in the plane should not be seen as an abstract figure, but as a real entity that has all three dimensions. Their restriction to a plane should stem from physical conditions.
We will therefore think of him as of a figure cut out of paper placed on a smooth plane. Sliding over this plane, and coming into contact with other figures equally thin as he in the third dimension, he will apprehend them only by their edges. To him they will be completely bounded by lines. A “solid” body will be to him a two-dimensional extent, the interior of which can only be reached by penetrating through the bounding lines.
We will therefore think of him as a figure cut out of paper placed on a flat surface. Sliding over this surface and coming into contact with other similarly thin figures in the third dimension, he will perceive them only by their edges. To him, they will be completely defined by lines. A “solid” body will appear to him as a two-dimensional shape, the inside of which can only be accessed by passing through the bounding lines.
Now such a plane being can think of our three-dimensional existence in two ways.
Now, such a being that exists in a plane can think about our three-dimensional reality in two ways.
First, he can think of it as a series of sections, each like the solid he knows of extending in a direction unknown to him, which stretches transverse to his tangible universe, which lies in a direction at right angles to every motion which he made.
First, he can see it as a series of parts, each one like a solid object extending in a direction he doesn’t know, stretching across his physical universe, which is at a right angle to every movement he makes.
Secondly, relinquishing the attempt to think of the three-dimensional solid body in its entirety he can regard it as consisting of a number of plane sections, each of them in itself exactly like the two-dimensional bodies he knows, but extending away from his two-dimensional space.
Secondly, by giving up trying to envision the three-dimensional solid as a whole, he can view it as made up of several flat sections, each of which is just like the two-dimensional shapes he understands, but stretching out beyond his two-dimensional space.
A square lying in his space he regards as a solid bounded by four lines, each of which lies in his space.
A square in his area is seen as a solid shape surrounded by four lines, each of which is positioned in his area.
A square standing at right angles to his plane appears to him as simply a line in his plane, for all of it except the line stretches in the third dimension.
A square that stands at right angles to his plane looks to him like just a line in his plane, because everything except that line extends into the third dimension.
He can think of a three-dimensional body as consisting of a number of such sections, each of which starts from a line in his space.
He can see a three-dimensional object as made up of several sections, each beginning from a line in his space.
Now, since in his world he can make any drawing or model which involves only two dimensions, he can represent each such upright section as it actually is, and can represent a turning from a known into the unknown dimension as a turning from one to another of his known dimensions.
Now, since in his world he can create any drawing or model that involves only two dimensions, he can accurately depict each upright section as it exists, and can show a shift from a known dimension to an unknown one as a transition from one of his known dimensions to another.
[Pg 64]
[Pg 64]
To see the whole he must relinquish part of that which he has, and take the whole portion by portion.
To see the whole picture, he must let go of some of what he has and take the complete thing piece by piece.

Consider now a plane being in front of a square, fig. 34. The square can turn about any point in the plane—say the point A. But it cannot turn about a line, as AB. For, in order to turn about the line AB, the square must leave the plane and move in the third dimension. This motion is out of his range of observation, and is therefore, except for a process of reasoning, inconceivable to him.
Consider now a square in front of a plane, fig. 34. The square can rotate around any point in the plane—let's say point A. However, it can't rotate around a line, like AB. To rotate around the line AB, the square would need to leave the plane and move into the third dimension. This motion is beyond its ability to perceive, and is therefore, aside from reasoning, unimaginable to it.
Rotation will therefore be to him rotation about a point. Rotation about a line will be inconceivable to him.
Rotation will therefore be to him rotation around a point. Rotation around a line will be unimaginable to him.
The result of rotation about a line he can apprehend. He can see the first and last positions occupied in a half-revolution about the line AC. The result of such a half revolution is to place the square ABCD on the left hand instead of on the right hand of the line AC. It would correspond to a pulling of the whole body ABCD through the line AC, or to the production of a solid body which was the exact reflection of it in the line AC. It would be as if the square ABCD turned into its image, the line AB acting as a mirror. Such a reversal of the positions of the parts of the square would be impossible in his space. The occurrence of it would be a proof of the existence of a higher dimensionality.
He can understand the result of rotating around a line. He can see the first and last positions taken during a half-turn around the line AC. This half turn moves the square ABCD to the left side instead of the right side of the line AC. It would be like pulling the entire square ABCD through the line AC or creating a solid shape that is the exact reflection of it across the line AC. It would be as if the square ABCD transformed into its image, with the line AB acting like a mirror. Such a reversal of the positions of the parts of the square would be impossible in his space. If it happened, it would prove the existence of a higher dimension.

Let him now, adopting the conception of a three-dimensional body as a series of sections lying, each removed a little farther than the preceding one, in direction at right angles to his plane, regard a cube, fig. 36, as a series of sections, each like the square which forms its base, all rigidly connected together.
Let him now, thinking of a three-dimensional object as a series of sections stacked a bit further away from the one before it, at right angles to his plane, look at a cube, fig. 36, as a series of sections, each like the square that makes up its base, all firmly connected together.
[Pg 65]
[Pg 65]
If now he turns the square about the point A in the plane of xy, each parallel section turns with the square he moves. In each of the sections there is a point at rest, that vertically over A. Hence he would conclude that in the turning of a three-dimensional body there is one line which is at rest. That is a three-dimensional turning in a turning about a line.
If he now rotates the square around point A in the plane of xy, each parallel section turns along with the square he moves. In each of the sections, there’s a point that remains stationary, directly above A. Therefore, he would conclude that when a three-dimensional object rotates, there is one line that stays still. That is the concept of three-dimensional rotation around a line.
In a similar way let us regard ourselves as limited to a three-dimensional world by a physical condition. Let us imagine that there is a direction at right angles to every direction in which we can move, and that we are prevented from passing in this direction by a vast solid, that against which in every movement we make we slip as the plane being slips against his plane sheet.
In the same way, let’s think of ourselves as confined to a three-dimensional world due to our physical condition. Imagine there’s a direction that’s perpendicular to every direction we can move in, and we’re blocked from moving in that direction by a massive solid object, against which we slide in every movement we make, just like a plane slips against its plane sheet.
We can then consider a four-dimensional body as consisting of a series of sections, each parallel to our space, and each a little farther off than the preceding on the unknown dimension.
We can think of a four-dimensional object as made up of a series of slices, each parallel to our three-dimensional space, and each slightly further away than the last along the unknown dimension.

Take the simplest four-dimensional body—one which begins as a cube, fig. 36, in our space, and consists of sections, each a cube like fig. 36, lying away from our space. If we turn the cube which is its base in our space about a line, if, e.g., in fig. 36 we turn the cube about the line AB, not only it but each of the parallel cubes moves about a line. The cube we see moves about the line AB, the cube beyond it about a line parallel to AB and so on. Hence the whole four-dimensional body moves about a plane, for the assemblage of these lines is our way of thinking about the plane which, starting from the line AB in our space, runs off in the unknown direction.
Take the simplest four-dimensional shape—one that starts as a cube, fig. 36, in our space, and is made up of sections, each a cube like fig. 36, positioned away from our space. If we rotate the base cube in our space around a line, if, for example, in fig. 36 we rotate the cube around the line AB, not just it but each of the parallel cubes moves around a line as well. The cube we see rotates around the line AB, the cube beyond it around a line parallel to AB, and so on. Therefore, the entire four-dimensional shape moves around a plane, since the collection of these lines represents our way of conceptualizing the plane that, starting from the line AB in our space, extends into the unknown direction.
[Pg 66]
[Pg 66]
In this case all that we see of the plane about which the turning takes place is the line AB.
In this case, all we see of the plane where the turning happens is the line AB.
But it is obvious that the axis plane may lie in our space. A point near the plane determines with it a three-dimensional space. When it begins to rotate round the plane it does not move anywhere in this three-dimensional space, but moves out of it. A point can no more rotate round a plane in three-dimensional space than a point can move round a line in two-dimensional space.
But it's clear that the axis plane can exist in our space. A point close to the plane defines a three-dimensional space with it. When it starts to rotate around the plane, it doesn’t stay within this three-dimensional space, but moves outside of it. A point can’t rotate around a plane in three-dimensional space any more than a point can move around a line in two-dimensional space.
We will now apply the second of the modes of representation to this case of turning about a plane, building up our analogy step by step from the turning in a plane about a point and that in space about a line, and so on.
We will now apply the second mode of representation to this case of turning in a plane, gradually building our analogy step by step from turning in a plane around a point to turning in space around a line, and so on.
In order to reduce our considerations to those of the greatest simplicity possible, let us realise how the plane being would think of the motion by which a square is turned round a line.
To simplify our thoughts as much as possible, let's understand how a flat being would perceive the motion of a square rotating around a line.
Let, fig. 34, ABCD be a square on his plane, and represent the two dimensions of his space by the axes Ax Ay.
Let, fig. 34, ABCD be a square on his plane, and represent the two dimensions of his space by the axes Ax Ay.
Now the motion by which the square is turned over about the line AC involves the third dimension.
Now the motion that flips the square over the line AC involves the third dimension.
He cannot represent the motion of the whole square in its turning, but he can represent the motions of parts of it. Let the third axis perpendicular to the plane of the paper be called the axis of z. Of the three axes x, y, z, the plane being can represent any two in his space. Let him then draw, in fig. 35, two axes, x and z. Here he has in his plane a representation of what exists in the plane which goes off perpendicularly to his space.
He can't show the movement of the whole square as it rotates, but he can show the movements of its parts. Let’s call the third axis that is perpendicular to the plane of the paper the axis of z. Of the three axes x, y, z, he can represent any two in his space. So, let him draw, in fig. 35, two axes, x and z. Here, he has a representation in his plane of what exists in the plane that extends out perpendicularly to his space.
In this representation the square would not be shown, for in the plane of xz simply the line AB of the square is contained.
In this representation, the square won't be shown, because in the xz plane, only the line AB of the square is present.
The plane being then would have before him, in fig. 35, the representation of one line AB of his square and two axes, x and z, at right angles. Now it would be obvious[Pg 67] to him that, by a turning such as he knows, by a rotation about a point, the line AB can turn round A, and occupying all the intermediate positions, such as AB1, come after half a revolution to lie as Ax produced through A.
The plane he had in front of him in fig. 35, showed the representation of one line AB of his square and two axes, x and z, at right angles. It would be clear[Pg 67] to him that, through a rotation he understands, by spinning around a point, the line AB can rotate around A, and while passing through all the intermediate positions, like AB1, after a half turn, it will align as Ax extended through A.
Again, just as he can represent the vertical plane through AB, so he can represent the vertical plane through A´B´, fig. 34, and in a like manner can see that the line A´B´ can turn about the point A´ till it lies in the opposite direction from that which it ran in at first.
Again, just as he can show the vertical plane through AB, he can also show the vertical plane through A'B', fig. 34, and similarly, he can observe that the line A'B' can rotate around the point A’ until it points in the opposite direction from where it started.
Now these two turnings are not inconsistent. In his plane, if AB turned about A, and A´B´ about A´, the consistency of the square would be destroyed, it would be an impossible motion for a rigid body to perform. But in the turning which he studies portion by portion there is nothing inconsistent. Each line in the square can turn in this way, hence he would realise the turning of the whole square as the sum of a number of turnings of isolated parts. Such turnings, if they took place in his plane, would be inconsistent, but by virtue of a third dimension they are consistent, and the result of them all is that the square turns about the line AC and lies in a position in which it is the mirror image of what it was in its first position. Thus he can realise a turning about a line by relinquishing one of his axes, and representing his body part by part.
Now, these two turns make sense together. In his plane, if AB rotates around A, and A'B' rotates around A’, it would mess up the consistency of the square, making it an impossible movement for a solid object. But in the way he examines the turns piece by piece, there’s nothing inconsistent about it. Each line in the square can rotate this way, so he can understand the rotation of the entire square as the sum of multiple turns of individual parts. Such rotations, if they happened in his plane, would be inconsistent, but thanks to a third dimension, they work together. The outcome is that the square rotates around the line AC and ends up in a position that is a mirror image of its original position. This way, he can comprehend a rotation around a line by letting go of one of his axes and representing his object part by part.
Let us apply this method to the turning of a cube so as to become the mirror image of itself. In our space we can construct three independent axes, x, y, z, shown in fig. 36. Suppose that there is a fourth axis, w, at right angles to each and every one of them. We cannot, keeping all three axes, x, y, z, represent w in our space; but if we relinquish one of our three axes we can let the fourth axis take its place, and we can represent what lies in the space, determined by the two axes we retain and the fourth axis.
Let's use this method to rotate a cube so that it becomes its own mirror image. In our space, we can create three independent axes, x, y, z, shown in fig. 36. Imagine there’s a fourth axis, w, that’s perpendicular to each of the three. We can't represent w in our space while maintaining all three axes, x, y, z; however, if we give up one of these three axes, we can let the fourth axis take its place and represent everything that exists in the space defined by the two remaining axes and the fourth axis.
[Pg 68]
[Pg 68]

Let us suppose that we let the y axis drop, and that we represent the w axis as occupying its direction. We have in fig. 37 a drawing of what we should then see of the cube. The square ABCD, remains unchanged, for that is in the plane of xz, and we still have that plane. But from this plane the cube stretches out in the direction of the y axis. Now the y axis is gone, and so we have no more of the cube than the face ABCD. Considering now this face ABCD, we see that it is free to turn about the line AB. It can rotate in the x to w direction about this line. In fig. 38 it is shown on its way, and it can evidently continue this rotation till it lies on the other side of the z axis in the plane of xz.
Let’s imagine that we let the y axis drop and represent the w axis in its place. In fig. 37, we have a drawing of what we would then see of the cube. The square ABCD remains the same because it’s in the xz plane, which still exists. But from this plane, the cube extends in the direction of the y axis. Now that the y axis is gone, all we have left of the cube is the face ABCD. Looking at this face ABCD, we can see that it can freely rotate around the line AB. It can spin in the x to w direction around this line. In fig. 38, it’s shown in motion, and it’s clear that it can keep rotating until it lies on the other side of the z axis in the xz plane.

We can also take a section parallel to the face ABCD, and then letting drop all of our space except the plane of that section, introduce the w axis, running in the old y direction. This section can be represented by the same drawing, fig. 38, and we see that it can rotate about the line on its left until it swings half way round and runs in the opposite direction to that which it ran in before. These turnings of the different sections are not inconsistent, and taken all together they will bring the cube from the position shown in fig. 36 to that shown in fig. 41.
We can also take a section parallel to the face ABCD, and then drop all of our space except for the plane of that section, introducing the w axis, which runs in the old y direction. This section can be shown in the same drawing, fig. 38, and we can see that it can rotate around the line on its left until it swings halfway around and goes in the opposite direction than it did before. These rotations of the different sections are not contradictory, and when combined, they will move the cube from the position shown in fig. 36 to the position shown in fig. 41.
Since we have three axes at our disposal in our space, we are not obliged to represent the w axis by any particular one. We may let any axis we like disappear, and let the fourth axis take its place.
Since we have three axes available in our space, we don't have to represent the w axis with any specific one. We can make any axis we choose disappear and let the fourth axis take its place.


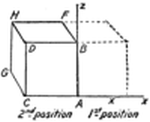
In fig. 36 suppose the z axis to go. We have then[Pg 69] simply the plane of xy and the square base of the cube ACEG, fig. 39, is all that could be seen of it. Let now the w axis take the place of the z axis and we have, in fig. 39 again, a representation of the space of xyw, in which all that exists of the cube is its square base. Now, by a turning of x to w, this base can rotate around the line AE, it is shown on its way in fig. 40, and finally it will, after half a revolution, lie on the other side of the y axis. In a similar way we may rotate sections parallel to the base of the xw rotation, and each of them comes to run in the opposite direction from that which they occupied at first.
In fig. 36, let's assume the z axis is extended. We then have[Pg 69] simply the plane of xy and the square base of the cube ACEG, fig. 39, is all that can be seen from it. Now, if the w axis replaces the z axis, we again have, in fig. 39, a representation of the space of xyw, where the only visible part of the cube is its square base. By turning x to w, this base can rotate around the line AE, as shown on its way in fig. 40, and after half a revolution, it will end up on the opposite side of the y axis. In a similar way, we can rotate sections parallel to the base of the xw rotation, and each of these sections will end up running in the opposite direction from their original position.
Thus again the cube comes from the position of fig. 36. to that of fig. 41. In this x to w turning, we see that it takes place by the rotations of sections parallel to the front face about lines parallel to AB, or else we may consider it as consisting of the rotation of sections parallel to the base about lines parallel to AE. It is a rotation of the whole cube about the plane ABEF. Two separate sections could not rotate about two separate lines in our space without conflicting, but their motion is consistent when we consider another dimension. Just, then, as a plane being can think of rotation about a line as a rotation about a number of points, these rotations not interfering as they would if they took place in his two-dimensional space, so we can think of a rotation about a[Pg 70] plane as the rotation of a number of sections of a body about a number of lines in a plane, these rotations not being inconsistent in a four-dimensional space as they are in three-dimensional space.
Thus again the cube moves from the position of fig. 36 to that of fig. 41. In this x to w rotation, we see that it happens through the spinning of sections parallel to the front face around lines parallel to AB, or we can also think of it as the rotation of sections parallel to the base around lines parallel to AE. It is a rotation of the entire cube around the plane ABEF. Two separate sections couldn't rotate around two separate lines in our space without conflicting, but their movement is consistent when we consider another dimension. Just as a two-dimensional being can think of rotation around a line as a rotation around multiple points—those rotations not interfering as they would if they occurred in their two-dimensional space—so we can think of a rotation about a plane as the rotation of multiple sections of a body around multiple lines in that plane, these rotations being consistent in four-dimensional space as they are not in three-dimensional space.
We are not limited to any particular direction for the lines in the plane about which we suppose the rotation of the particular sections to take place. Let us draw the section of the cube, fig. 36, through A, F, C, H, forming a sloping plane. Now since the fourth dimension is at right angles to every line in our space it is at right angles to this section also. We can represent our space by drawing an axis at right angles to the plane ACEG, our space is then determined by the plane ACEG, and the perpendicular axis. If we let this axis drop and suppose the fourth axis, w, to take its place, we have a representation of the space which runs off in the fourth dimension from the plane ACEG. In this space we shall see simply the section ACEG of the cube, and nothing else, for one cube does not extend to any distance in the fourth dimension.
We aren't restricted to any specific direction for the lines in the plane regarding the rotation of the specific sections. Let's draw the section of the cube, fig. 36, through A, F, C, H, creating a sloped plane. Since the fourth dimension is perpendicular to every line in our space, it is also perpendicular to this section. We can illustrate our space by drawing an axis that is perpendicular to the plane ACEG; our space is then defined by the plane ACEG and the perpendicular axis. If we let this axis drop and imagine the fourth axis, w, taking its place, we have a representation of a space that extends into the fourth dimension from the plane ACEG. In this space, we will only see the section ACEG of the cube and nothing else, since a cube does not extend into any distance in the fourth dimension.
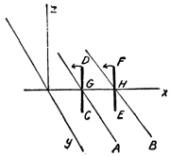
If, keeping this plane, we bring in the fourth dimension, we shall have a space in which simply this section of the cube exists and nothing else. The section can turn about the line AF, and parallel sections can turn about parallel lines. Thus in considering the rotation about a plane we can draw any lines we like and consider the rotation as taking place in sections about them.
If we take this flat surface and add the fourth dimension, we create a space where only this section of the cube exists, nothing more. This section can rotate around the line AF, and parallel sections can rotate around parallel lines. So, when we think about rotation around a flat surface, we can draw any lines we want and think of the rotation as happening in sections around those lines.
To bring out this point more clearly let us take two parallel lines, A and B, in the space of xyz, and let CD and EF be two rods running above and below the plane of xy, from these lines. If we[Pg 71] turn these rods in our space about the lines A and B, as the upper end of one, F, is going down, the lower end of the other, C, will be coming up. They will meet and conflict. But it is quite possible for these two rods each of them to turn about the two lines without altering their relative distances.
To clarify this point, let's consider two parallel lines, A and B, in the space of xyz, with CD and EF as two rods extending above and below the xy plane from these lines. If we[Pg 71] rotate these rods around the lines A and B, while the upper end of one, F, moves down, the lower end of the other, C, will move up. They will intersect and create tension. However, it is entirely possible for these two rods to rotate around the two lines without changing their relative distances.
To see this suppose the y axis to go, and let the w axis take its place. We shall see the lines A and B no longer, for they run in the y direction from the points G and H.
To visualize this, imagine the y axis disappearing and the w axis taking its place. We will no longer see the lines A and B, since they run in the y direction from the points G and H.

Fig. 43 is a picture of the two rods seen in the space of xzw. If they rotate in the direction shown by the arrows—in the z to w direction—they move parallel to one another, keeping their relative distances. Each will rotate about its own line, but their rotation will not be inconsistent with their forming part of a rigid body.
Fig. 43 shows a picture of the two rods in the space of xzw. If they rotate in the direction indicated by the arrows—in the z to w direction—they will move parallel to each other, maintaining their relative distances. Each rod will rotate around its own axis, but their rotation will still be consistent with them being part of a rigid body.
Now we have but to suppose a central plane with rods crossing it at every point, like CD and EF cross the plane of xy, to have an image of a mass of matter extending equal distances on each side of a diametral plane. As two of these rods can rotate round, so can all, and the whole mass of matter can rotate round its diametral plane.
Now we just need to imagine a central plane with rods crossing it at every point, like CD and EF intersect the plane of xy, to visualize a mass of matter extending equal distances on either side of a central plane. Just as two of these rods can rotate around, so can all of them, allowing the entire mass of matter to rotate around its central plane.
This rotation round a plane corresponds, in four dimensions, to the rotation round an axis in three dimensions. Rotation of a body round a plane is the analogue of rotation of a rod round an axis.
This rotation around a plane corresponds, in four dimensions, to the rotation around an axis in three dimensions. The rotation of a body around a plane is similar to the rotation of a rod around an axis.
In a plane we have rotation round a point, in three-space rotation round an axis line, in four-space rotation round an axis plane.
In a plane, we have rotation around a point; in three-dimensional space, rotation around an axis line; and in four-dimensional space, rotation around an axis plane.
The four-dimensional being’s shaft by which he transmits power is a disk rotating round its central[Pg 72] plane—the whole contour corresponds to the ends of an axis of rotation in our space. He can impart the rotation at any point and take it off at any other point on the contour, just as rotation round a line can in three-space be imparted at one end of a rod and taken off at the other end.
The four-dimensional being’s shaft, through which he transmits power, is a disk that rotates around its central[Pg 72] plane—the entire shape corresponds to the ends of an axis of rotation in our space. He can start the rotation at any point and stop it at any other point on the shape, just like how rotation around a line can be started at one end of a rod and stopped at the other end.
A four-dimensional wheel can easily be described from the analogy of the representation which a plane being would form for himself of one of our wheels.
A four-dimensional wheel can be easily explained by comparing it to how a being in two dimensions would perceive one of our wheels.
Suppose a wheel to move transverse to a plane, so that the whole disk, which I will consider to be solid and without spokes, came at the same time into contact with the plane. It would appear as a circular portion of plane matter completely enclosing another and smaller portion—the axle.
Suppose a wheel moves sideways across a flat surface, so that the entire disk, which I’ll treat as solid and without spokes, comes into contact with the surface all at once. It would look like a circular section of flat material completely surrounding another, smaller section—the axle.
This appearance would last, supposing the motion of the wheel to continue until it had traversed the plane by the extent of its thickness, when there would remain in the plane only the small disk which is the section of the axle. There would be no means obvious in the plane at first by which the axle could be reached, except by going through the substance of the wheel. But the possibility of reaching it without destroying the substance of the wheel would be shown by the continued existence of the axle section after that of the wheel had disappeared.
This appearance would last, assuming the wheel kept moving until it had crossed the surface by the thickness of the wheel. At that point, only the small disk, which is the axle's section, would be left on the surface. Initially, there wouldn't be a clear way to access the axle from the surface, except by cutting through the wheel itself. However, the fact that the axle section would still be present after the wheel had vanished would prove that it could be reached without damaging the wheel.
In a similar way a four-dimensional wheel moving transverse to our space would appear first as a solid sphere, completely surrounding a smaller solid sphere. The outer sphere would represent the wheel, and would last until the wheel has traversed our space by a distance equal to its thickness. Then the small sphere alone would remain, representing the section of the axle. The large sphere could move round the small one quite freely. Any line in space could be taken as an axis, and round this line the outer sphere could rotate, while the inner sphere remained still. But in all these directions of[Pg 73] revolution there would be in reality one line which remained unaltered, that is the line which stretches away in the fourth direction, forming the axis of the axle. The four-dimensional wheel can rotate in any number of planes, but all these planes are such that there is a line at right angles to them all unaffected by rotation in them.
In a similar way, a four-dimensional wheel moving across our space would first look like a solid sphere completely surrounding a smaller solid sphere. The outer sphere would represent the wheel and would exist until the wheel has moved a distance equal to its thickness through our space. Then, only the small sphere would remain, representing the axle section. The large sphere could freely rotate around the small one. Any line in space could be used as an axis, around which the outer sphere could rotate while the inner sphere stayed still. However, in all these directions of rotation, there would actually be one line that remains unchanged, which is the line extending in the fourth direction, forming the axle's axis. The four-dimensional wheel can spin in multiple planes, but all these planes have a line perpendicular to them that is unaffected by the rotation within those planes.
An objection is sometimes experienced as to this mode of reasoning from a plane world to a higher dimensionality. How artificial, it is argued, this conception of a plane world is. If any real existence confined to a superficies could be shown to exist, there would be an argument for one relative to which our three-dimensional existence is superficial. But, both on the one side and the other of the space we are familiar with, spaces either with less or more than three dimensions are merely arbitrary conceptions.
An objection sometimes arises regarding the reasoning from a flat world to a higher dimension. It's argued that this idea of a flat world is quite artificial. If any real existence limited to a two-dimensional surface could be demonstrated, it would provide an argument for a perspective from which our three-dimensional existence seems superficial. However, both beyond and beneath the space we know, dimensions with either less or more than three are simply arbitrary concepts.
In reply to this I would remark that a plane being having one less dimension than our three would have one-third of our possibilities of motion, while we have only one-fourth less than those of the higher space. It may very well be that there may be a certain amount of freedom of motion which is demanded as a condition of an organised existence, and that no material existence is possible with a more limited dimensionality than ours. This is well seen if we try to construct the mechanics of a two-dimensional world. No tube could exist, for unless joined together completely at one end two parallel lines would be completely separate. The possibility of an organic structure, subject to conditions such as this, is highly problematical; yet, possibly in the convolutions of the brain there may be a mode of existence to be described as two-dimensional.
In response to this, I would say that a plane, having one less dimension than our three, would have one-third of our movement possibilities, while we have only one-fourth less than those of a higher dimension. It’s quite possible that there’s a certain degree of freedom in motion that’s necessary for organized existence, and that no physical existence can occur with a lower dimensionality than ours. This is clearly illustrated if we try to create the mechanics of a two-dimensional world. No tube could exist because unless completely connected at one end, two parallel lines would remain entirely separate. The chance of having an organic structure under such conditions is very questionable; however, it’s possible that within the folds of the brain, there exists some mode of being that could be described as two-dimensional.
We have but to suppose the increase in surface and the diminution in mass carried on to a certain extent to find a region which, though without mobility of the[Pg 74] constituents, would have to be described as two-dimensional.
We just need to assume that the surface area increases and the mass decreases to a certain point to identify a region that, while having no movement of its components, would need to be described as two-dimensional.
But, however artificial the conception of a plane being may be, it is none the less to be used in passing to the conception of a greater dimensionality than ours, and hence the validity of the first part of this objection altogether disappears directly we find evidence for such a state of being.
But, no matter how artificial the idea of a plane being might be, it’s still useful in moving towards the idea of a higher dimensionality than our own, and so the validity of the first part of this objection completely disappears as soon as we find evidence for such a state of existence.
The second part of the objection has more weight. How is it possible to conceive that in a four-dimensional space any creatures should be confined to a three-dimensional existence?
The second part of the objection has more weight. How can we imagine that in a four-dimensional space, any beings would be limited to a three-dimensional existence?
In reply I would say that we know as a matter of fact that life is essentially a phenomenon of surface. The amplitude of the movements which we can make is much greater along the surface of the earth than it is up or down.
In response, I would say that we know for a fact that life is basically a surface phenomenon. The range of movements we can make is much greater along the surface of the earth than it is vertically.
Now we have but to conceive the extent of a solid surface increased, while the motions possible tranverse to it are diminished in the same proportion, to obtain the image of a three-dimensional world in four-dimensional space.
Now we just need to imagine the size of a solid surface increasing, while the movements possible across it are reduced by the same amount, to create the idea of a three-dimensional world in four-dimensional space.
And as our habitat is the meeting of air and earth on the world, so we must think of the meeting place of two as affording the condition for our universe. The meeting of what two? What can that vastness be in the higher space which stretches in such a perfect level that our astronomical observations fail to detect the slightest curvature?
And just as our environment is where air and earth come together in the world, we should consider that connection between the two as providing the setting for our universe. The connection of which two? What could that vastness be in the higher space that extends so perfectly flat that our astronomical observations can’t find even the tiniest curvature?
The perfection of the level suggests a liquid—a lake amidst what vast scenery!—whereon the matter of the universe floats speck-like.
The perfect flatness suggests a body of water—a lake surrounded by such vast scenery!—where the universe’s matter floats like tiny specks.
But this aspect of the problem is like what are called in mathematics boundary conditions.
But this aspect of the problem is similar to what are known in mathematics as boundary conditions.
We can trace out all the consequences of four-dimensional movements down to their last detail. Then, knowing[Pg 75] the mode of action which would be characteristic of the minutest particles, if they were free, we can draw conclusions from what they actually do of what the constraint on them is. Of the two things, the material conditions and the motion, one is known, and the other can be inferred. If the place of this universe is a meeting of two, there would be a one-sideness to space. If it lies so that what stretches away in one direction in the unknown is unlike what stretches away in the other, then, as far as the movements which participate in that dimension are concerned, there would be a difference as to which way the motion took place. This would be shown in the dissimilarity of phenomena, which, so far as all three-space movements are concerned, were perfectly symmetrical. To take an instance, merely, for the sake of precising our ideas, not for any inherent probability in it; if it could be shown that the electric current in the positive direction were exactly like the electric current in the negative direction, except for a reversal of the components of the motion in three-dimensional space, then the dissimilarity of the discharge from the positive and negative poles would be an indication of a one-sideness to our space. The only cause of difference in the two discharges would be due to a component in the fourth dimension, which directed in one direction transverse to our space, met with a different resistance to that which it met when directed in the opposite direction.
We can map out all the effects of four-dimensional movements down to the smallest detail. Then, by understanding how the tiniest particles would behave if they were free, we can infer what restrictions are acting on them based on their actual behavior. Of the two factors, the physical conditions and the movement, one is known, and the other can be deduced. If this universe is a convergence of two, there would be an asymmetry to space. If it is structured so that what extends in one direction in the unknown is different from what extends in the other, then, regarding the movements in that dimension, there would be a distinction in the direction of the motion. This would be evident in the differences in phenomena, which, for all three-dimensional movements, are completely symmetrical. To give an example, just to clarify our ideas, not because of any inherent likelihood; if it could be demonstrated that the electric current flowing in the positive direction is exactly the same as the current flowing in the negative direction, except for the reversal of the components of the movement in three-dimensional space, then the differences in discharge from the positive and negative poles would indicate an asymmetry in our space. The only reason for the differences in the two discharges would be due to a component in the fourth dimension, which, when directed in one transverse direction to our space, faced different resistance than when directed in the opposite direction.
[Pg 76]
[Pg 76]
CHAPTER VII
THE EVIDENCES FOR A FOURTH DIMENSION
The method necessarily to be employed in the search for the evidences of a fourth dimension, consists primarily in the formation of the conceptions of four-dimensional shapes and motions. When we are in possession of these it is possible to call in the aid of observation, without them we may have been all our lives in the familiar presence of a four-dimensional phenomenon without ever recognising its nature.
The method needed to search for evidence of a fourth dimension primarily involves developing an understanding of four-dimensional shapes and movements. Once we have that understanding, we can use observation to help us; without it, we might have spent our whole lives near a four-dimensional phenomenon without ever realizing what it was.
To take one of the conceptions we have already formed, the turning of a real thing into its mirror image would be an occurrence which it would be hard to explain, except on the assumption of a fourth dimension.
To take one of the ideas we've already developed, turning a real thing into its mirror image would be an event that's difficult to explain, unless we assume there's a fourth dimension.
We know of no such turning. But there exist a multitude of forms which show a certain relation to a plane, a relation of symmetry, which indicates more than an accidental juxtaposition of parts. In organic life the universal type is of right- and left-handed symmetry, there is a plane on each side of which the parts correspond. Now we have seen that in four dimensions a plane takes the place of a line in three dimensions. In our space, rotation about an axis is the type of rotation, and the origin of bodies symmetrical about a line as the earth is symmetrical about an axis can easily be explained. But where there is symmetry about a plane no simple physical motion, such as we[Pg 77] are accustomed to, suffices to explain it. In our space a symmetrical object must be built up by equal additions on each side of a central plane. Such additions about such a plane are as little likely as any other increments. The probability against the existence of symmetrical form in inorganic nature is overwhelming in our space, and in organic forms they would be as difficult of production as any other variety of configuration. To illustrate this point we may take the child’s amusement of making from dots of ink on a piece of paper a lifelike representation of an insect by simply folding the paper over. The dots spread out on a symmetrical line, and give the impression of a segmented form with antennæ and legs.
We’re not aware of any such turning. However, there are many forms that show a certain relationship to a plane, a relationship of symmetry, which suggests more than just an accidental arrangement of parts. In organic life, the universal type displays right- and left-handed symmetry, meaning there is a plane on which the parts correspond on both sides. We’ve observed that in four dimensions, a plane replaces a line in three dimensions. In our space, rotation around an axis is the primary type of rotation, and it’s easy to explain the origin of bodies that are symmetrical around a line, just like the Earth is symmetrical around an axis. But when it comes to symmetry around a plane, there’s no simple physical motion, like what we’re used to, that can explain it. In our space, a symmetrical object must be constructed by making equal additions on either side of a central plane. Such additions around that plane are just as unlikely as any other increments. The likelihood of symmetrical forms appearing in inorganic nature is extremely low in our space, and producing them in organic forms would be just as challenging as creating any other type of configuration. To illustrate this, we can think of a child's activity of making a lifelike representation of an insect by simply folding a piece of paper with dots of ink on it. The dots align along a symmetrical line and create the impression of a segmented form with antennae and legs.
Now seeing a number of such figures we should naturally infer a folding over. Can, then, a folding over in four-dimensional space account for the symmetry of organic forms? The folding cannot of course be of the bodies we see, but it may be of those minute constituents, the ultimate elements of living matter which, turned in one way or the other, become right- or left-handed, and so produce a corresponding structure.
Now that we see several of these figures, we should naturally conclude that there’s a folding over happening. So, can a folding over in four-dimensional space explain the symmetry of organic forms? The folding cannot be of the visible bodies, but it could involve those tiny components, the basic elements of living matter that, depending on their orientation, become right- or left-handed, thus creating a corresponding structure.
There is something in life not included in our conceptions of mechanical movement. Is this something a four-dimensional movement?
There’s something in life that isn’t captured by our ideas of mechanical movement. Is this something a four-dimensional movement?
If we look at it from the broadest point of view, there is something striking in the fact that where life comes in there arises an entirely different set of phenomena to those of the inorganic world.
If we look at it from the biggest perspective, it’s striking that where life exists, we see a completely different set of phenomena compared to the inorganic world.
The interest and values of life as we know it in ourselves, as we know it existing around us in subordinate forms, is entirely and completely different to anything which inorganic nature shows. And in living beings we have a kind of form, a disposition of matter which is entirely different from that shown in inorganic matter.[Pg 78] Right- and left-handed symmetry does not occur in the configurations of dead matter. We have instances of symmetry about an axis, but not about a plane. It can be argued that the occurrence of symmetry in two dimensions involves the existence of a three-dimensional process, as when a stone falls into water and makes rings of ripples, or as when a mass of soft material rotates about an axis. It can be argued that symmetry in any number of dimensions is the evidence of an action in a higher dimensionality. Thus considering living beings, there is an evidence both in their structure, and their different mode of activity, of a something coming in from without into the inorganic world.
The interests and values of life as we experience them in ourselves, and as they exist around us in simpler forms, are completely different from anything that inorganic nature presents. In living beings, we have a type of form and a arrangement of matter that is totally unlike that found in inorganic matter.[Pg 78] Right- and left-handed symmetry doesn't appear in the configurations of lifeless matter. We see examples of symmetry around an axis, but not around a plane. One could argue that symmetry in two dimensions implies a three-dimensional process, like when a stone drops into water and creates ripples, or when a mass of soft material spins around an axis. It's arguable that symmetry in any number of dimensions indicates action in a higher dimension. Therefore, when we consider living beings, there’s a clear indication in both their structure and their different ways of functioning that something is entering from outside into the inorganic world.
And the objections which will readily occur, such as those derived from the forms of twin crystals and the theoretical structure of chemical molecules, do not invalidate the argument; for in these forms too the presumable seat of the activity producing them lies in that very minute region in which we necessarily place the seat of a four-dimensional mobility.
And the objections that might come to mind, like those related to the shapes of twin crystals and the theoretical structure of chemical molecules, don't weaken the argument; because even in these cases, the likely source of the activity creating them is found in that tiny region where we must locate the source of a four-dimensional mobility.
In another respect also the existence of symmetrical forms is noteworthy. It is puzzling to conceive how two shapes exactly equal can exist which are not superposible. Such a pair of symmetrical figures as the two hands, right and left, show either a limitation in our power of movement, by which we cannot superpose the one on the other, or a definite influence and compulsion of space on matter, inflicting limitations which are additional to those of the proportions of the parts.
In another way, the existence of symmetrical shapes is interesting. It's confusing to think about how two identical shapes can exist that can't be placed on top of each other. For example, the two hands, right and left, illustrate either a limit to our ability to move, which prevents us from stacking one on the other, or a specific influence and restriction of space on matter, adding limitations beyond just the proportions of the individual parts.
We will, however, put aside the arguments to be drawn from the consideration of symmetry as inconclusive, retaining one valuable indication which they afford. If it is in virtue of a four-dimensional motion that symmetry exists, it is only in the very minute particles of bodies that that motion is to be found, for there is[Pg 79] no such thing as a bending over in four dimensions of any object of a size which we can observe. The region of the extremely minute is the one, then, which we shall have to investigate. We must look for some phenomenon which, occasioning movements of the kind we know, still is itself inexplicable as any form of motion which we know.
We will, however, set aside the arguments related to symmetry as inconclusive, while keeping one valuable insight they provide. If symmetry exists because of a four-dimensional motion, that motion can only be found in the very tiny particles of matter. There is no observable object that bends in four dimensions. Therefore, we need to explore the realm of the extremely small. We must search for some phenomenon that causes movements like those we understand, yet remains mysterious and can't be explained as any type of motion we know.
Now in the theories of the actions of the minute particles of bodies on one another, and in the motions of the ether, mathematicians have tacitly assumed that the mechanical principles are the same as those which prevail in the case of bodies which can be observed, it has been assumed without proof that the conception of motion being three-dimensional, holds beyond the region from observations in which it was formed.
Now, in the theories about how tiny particles of matter interact with each other and in the movements of the ether, mathematicians have quietly assumed that the same mechanical principles apply as those observed in larger bodies. It has been taken for granted, without proof, that the idea of motion being three-dimensional holds true beyond the area where it was initially observed.
Hence it is not from any phenomenon explained by mathematics that we can derive a proof of four dimensions. Every phenomenon that has been explained is explained as three-dimensional. And, moreover, since in the region of the very minute we do not find rigid bodies acting on each other at a distance, but elastic substances and continuous fluids such as ether, we shall have a double task.
Hence, we can't prove four dimensions based on any phenomenon explained by mathematics. Every explained phenomenon is described as three-dimensional. Additionally, in the realm of the very small, we don't see rigid bodies interacting at a distance; instead, we encounter elastic materials and continuous fluids like ether. Therefore, we have a dual challenge.
We must form the conceptions of the possible movements of elastic and liquid four-dimensional matter, before we can begin to observe. Let us, therefore, take the four-dimensional rotation about a plane, and enquire what it becomes in the case of extensible fluid substances. If four-dimensional movements exist, this kind of rotation must exist, and the finer portions of matter must exhibit it.
We need to develop our understanding of the potential movements of elastic and liquid four-dimensional matter before we can start observing. So, let's examine four-dimensional rotation around a plane and see how it applies to stretchable fluid substances. If four-dimensional movements are real, this type of rotation must also exist, and the finer parts of matter should show it.
Consider for a moment a rod of flexible and extensible material. It can turn about an axis, even if not straight; a ring of india rubber can turn inside out.
Consider for a moment a rod made of flexible and stretchable material. It can rotate around an axis, even if it isn't straight; a rubber ring can flip inside out.
What would this be in the case of four dimensions?
What would this look like in four dimensions?
[Pg 80]
[Pg 80]

Axis of x running towards the observer.
Let us consider a sphere of our three-dimensional matter having a definite thickness. To represent this thickness let us suppose that from every point of the sphere in fig. 44 rods project both ways, in and out, like D and F. We can only see the external portion, because the internal parts are hidden by the sphere.
Let’s take a look at a sphere made of our three-dimensional material that has a specific thickness. To show this thickness, let’s imagine that rods extend from every point of the sphere in fig. 44 directions, both inward and outward, like D and F. We can only see the outer part because the inner sections are concealed by the sphere.
In this sphere the axis of x is supposed to come towards the observer, the axis of z to run up, the axis of y to go to the right.
In this space, the axis of x is assumed to come towards the observer, the axis of z goes upwards, and the axis of y extends to the right.
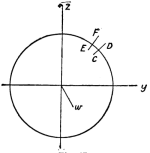
Now take the section determined by the zy plane. This will be a circle as shown in fig. 45. If we let drop the x axis, this circle is all we have of the sphere. Letting the w axis now run in the place of the old x axis we have the space yzw, and in this space all that we have of the sphere is the circle. Fig. 45 then represents all that there is of the sphere in the space of yzw. In this space it is evident that the rods CD and EF can turn round the circumference as an axis. If the matter of the spherical shell is sufficiently extensible to allow the particles C and E to become as widely separated as they would be in the positions D and F, then[Pg 81] the strip of matter represented by CD and EF and a multitude of rods like them can turn round the circular circumference.
Now take the section defined by the zy plane. This will be a circle as shown in fig. 45. If we drop the x axis, this circle is all we have of the sphere. With the w axis now taking the place of the old x axis, we have the space yzw, and in this space, all that we have of the sphere is the circle. Fig. 45 then represents everything that there is of the sphere in the yzw space. In this space, it’s clear that the rods CDs and EF can rotate around the circumference as an axis. If the material of the spherical shell is flexible enough to allow particles C and E to be as far apart as they would be in positions D and F, then[Pg 81] the strip of matter represented by CD (Compact Disc) and EF along with many other similar rods can rotate around the circular edge.
Thus this particular section of the sphere can turn inside out, and what holds for any one section holds for all. Hence in four dimensions the whole sphere can, if extensible turn inside out. Moreover, any part of it—a bowl-shaped portion, for instance—can turn inside out, and so on round and round.
Thus this specific part of the sphere can turn inside out, and what applies to any one part applies to all. Therefore, in four dimensions, the entire sphere can, if it can stretch, turn inside out. Additionally, any part of it—a bowl-shaped section, for example—can turn inside out, and so on, over and over.
This is really no more than we had before in the rotation about a plane, except that we see that the plane can, in the case of extensible matter, be curved, and still play the part of an axis.
This is basically the same as what we had before with rotation around a plane, except now we understand that the plane can be curved in the case of flexible materials and still act as an axis.
If we suppose the spherical shell to be of four-dimensional matter, our representation will be a little different. Let us suppose there to be a small thickness to the matter in the fourth dimension. This would make no difference in fig. 44, for that merely shows the view in the xyz space. But when the x axis is let drop, and the w axis comes in, then the rods CD and EF which represent the matter of the shell, will have a certain thickness perpendicular to the plane of the paper on which they are drawn. If they have a thickness in the fourth dimension they will show this thickness when looked at from the direction of the w axis.
If we assume the spherical shell is made of four-dimensional matter, our representation will look a bit different. Let's imagine there’s a small thickness to the matter in the fourth dimension. This wouldn’t change anything in fig. 44, as that just displays the view in the xyz space. But when we drop the x axis and bring in the w axis, the rods CD and EF, which represent the matter of the shell, will have some thickness that sticks out perpendicular to the plane of the paper where they are drawn. If they do have thickness in the fourth dimension, it will be visible when viewed from the direction of the w axis.
Supposing these rods, then, to be small slabs strung on the circumference of the circle in fig. 45, we see that there will not be in this case either any obstacle to their turning round the circumference. We can have a shell of extensible material or of fluid material turning inside out in four dimensions.
Supposing these rods are small slabs arranged around the edge of the circle in fig. 45, we see that there won't be any obstacle for them to rotate around the edge. We can have a shell made of flexible material or liquid turning inside out in four dimensions.
And we must remember that in four dimensions there is no such thing as rotation round an axis. If we want to investigate the motion of fluids in four dimensions we must take a movement about an axis in our space, and[Pg 82] find the corresponding movement about a plane in four space.
And we have to keep in mind that in four dimensions, there's no concept of rotating around an axis. If we want to study how fluids move in four dimensions, we need to take a movement around an axis in our three-dimensional space and find the equivalent movement around a plane in four-dimensional space.[Pg 82]
Now, of all the movements which take place in fluids, the most important from a physical point of view is vortex motion.
Now, among all the movements that occur in fluids, the most significant from a physical perspective is vortex motion.
A vortex is a whirl or eddy—it is shown in the gyrating wreaths of dust seen on a summer day; it is exhibited on a larger scale in the destructive march of a cyclone.
A vortex is a whirl or swirl—it’s seen in the spinning clouds of dust on a summer day; it’s displayed on a larger scale in the damaging path of a cyclone.
A wheel whirling round will throw off the water on it. But when this circling motion takes place in a liquid itself it is strangely persistent. There is, of course, a certain cohesion between the particles of water by which they mutually impede their motions. But in a liquid devoid of friction, such that every particle is free from lateral cohesion on its path of motion, it can be shown that a vortex or eddy separates from the mass of the fluid a certain portion, which always remain in that vortex.
A spinning wheel will splash off the water on it. But when this spinning happens in the liquid itself, it’s oddly persistent. There is, of course, a certain attraction between the water particles that slows down their movement. However, in a liquid without friction, where each particle can move freely without sticking to others, it can be demonstrated that a vortex or whirlpool pulls away a portion of the fluid that always stays in that vortex.
The shape of the vortex may alter, but it always consists of the same particles of the fluid.
The shape of the vortex may change, but it always contains the same particles of the fluid.
Now, a very remarkable fact about such a vortex is that the ends of the vortex cannot remain suspended and isolated in the fluid. They must always run to the boundary of the fluid. An eddy in water that remains half way down without coming to the top is impossible.
Now, a very interesting fact about such a vortex is that the ends of the vortex can't stay suspended and separate in the fluid. They always have to reach the edge of the fluid. An eddy in water that stays halfway down without surfacing is impossible.
The ends of a vortex must reach the boundary of a fluid—the boundary may be external or internal—a vortex may exist between two objects in the fluid, terminating one end on each object, the objects being internal boundaries of the fluid. Again, a vortex may have its ends linked together, so that it forms a ring. Circular vortex rings of this description are often seen in puffs of smoke, and that the smoke travels on in the ring is a proof that the vortex always consists of the same particles of air.
The ends of a vortex must reach the edge of a fluid—the edge can be external or internal—a vortex can exist between two objects in the fluid, with one end on each object, making the objects internal boundaries of the fluid. Additionally, a vortex can have its ends connected, forming a ring. Circular vortex rings like this are commonly seen in puffs of smoke, and the fact that the smoke continues to move along the ring proves that the vortex is made up of the same particles of air.
[Pg 83]
[Pg 83]
Let us now enquire what a vortex would be in a four-dimensional fluid.
Let’s now explore what a vortex would be like in a four-dimensional fluid.
We must replace the line axis by a plane axis. We should have therefore a portion of fluid rotating round a plane.
We need to change the line axis to a plane axis. So, we should have a section of fluid rotating around a plane.
We have seen that the contour of this plane corresponds with the ends of the axis line. Hence such a four-dimensional vortex must have its rim on a boundary of the fluid. There would be a region of vorticity with a contour. If such a rotation were started at one part of a circular boundary, its edges would run round the boundary in both directions till the whole interior region was filled with the vortex sheet.
We have seen that the shape of this plane matches the ends of the axis line. Therefore, this four-dimensional vortex must have its edge on the boundary of the fluid. There would be an area of swirling motion with a shape. If this rotation started at one point of a circular boundary, its edges would move around the boundary in both directions until the entire inner area was filled with the vortex layer.
A vortex in a three-dimensional liquid may consist of a number of vortex filaments lying together producing a tube, or rod of vorticity.
A vortex in a three-dimensional liquid can be made up of several vortex filaments grouped together, creating a tube or rod of vorticity.
In the same way we can have in four dimensions a number of vortex sheets alongside each other, each of which can be thought of as a bowl-shaped portion of a spherical shell turning inside out. The rotation takes place at any point not in the space occupied by the shell, but from that space to the fourth dimension and round back again.
In the same way, we can have multiple vortex sheets in four dimensions, each resembling a bowl-shaped part of a spherical shell turning inside out. The rotation happens at any point outside the space occupied by the shell, moving into the fourth dimension and then back again.
Is there anything analogous to this within the range of our observation?
Is there anything similar to this within our view?
An electric current answers this description in every respect. Electricity does not flow through a wire. Its effect travels both ways from the starting point along the wire. The spark which shows its passing midway in its circuit is later than that which occurs at points near its starting point on either side of it.
An electric current fits this description perfectly. Electricity doesn't flow through a wire. Its effect travels both ways from the starting point along the wire. The spark that shows its movement halfway in the circuit happens later than the sparks that occur at points close to its starting point on either side.
Moreover, it is known that the action of the current is not in the wire. It is in the region enclosed by the wire, this is the field of force, the locus of the exhibition of the effects of the current.
Moreover, it's understood that the flow of electricity isn't inside the wire. It's in the area surrounded by the wire; this is the field of force, where the effects of the current are displayed.
And the necessity of a conducting circuit for a current is[Pg 84] exactly that which we should expect if it were a four-dimensional vortex. According to Maxwell every current forms a closed circuit, and this, from the four-dimensional point of view, is the same as saying a vortex must have its ends on a boundary of the fluid.
And the need for a conducting circuit for a current is[Pg 84] exactly what we would expect if it were a four-dimensional vortex. According to Maxwell, every current creates a closed circuit, and from a four-dimensional perspective, this is the same as saying a vortex must have its ends on the boundary of the fluid.
Thus, on the hypothesis of a fourth dimension, the rotation of the fluid ether would give the phenomenon of an electric current. We must suppose the ether to be full of movement, for the more we examine into the conditions which prevail in the obscurity of the minute, the more we find that an unceasing and perpetual motion reigns. Thus we may say that the conception of the fourth dimension means that there must be a phenomenon which presents the characteristics of electricity.
Thus, based on the idea of a fourth dimension, the movement of the fluid ether would create the effect of an electric current. We have to assume that the ether is full of motion, as the more we investigate the conditions present in the tiny details, the more we discover that constant and ongoing motion exists. Therefore, we can say that the concept of the fourth dimension implies that there must be a phenomenon that displays the traits of electricity.
We know now that light is an electro-magnetic action, and that so far from being a special and isolated phenomenon this electric action is universal in the realm of the minute. Hence, may we not conclude that, so far from the fourth dimension being remote and far away, being a thing of symbolic import, a term for the explanation of dubious facts by a more obscure theory, it is really the most important fact within our knowledge. Our three-dimensional world is superficial. These processes, which really lie at the basis of all phenomena of matter, escape our observation by their minuteness, but reveal to our intellect an amplitude of motion surpassing any that we can see. In such shapes and motions there is a realm of the utmost intellectual beauty, and one to which our symbolic methods apply with a better grace than they do to those of three dimensions.
We now understand that light is an electromagnetic phenomenon, and rather than being a unique or isolated occurrence, this electrical action is universal at the microscopic level. Therefore, can we conclude that the fourth dimension isn’t distant or abstract, a term used to explain unclear facts through a more complex theory, but is actually the most significant fact we know? Our three-dimensional world is superficial. The processes that form the foundation of all material phenomena evade our perception due to their small size, yet they reveal to our intellect a range of motion that exceeds anything we can see. In these shapes and movements, there exists a realm of profound intellectual beauty, one that our symbolic methods describe more elegantly than those of three dimensions.
[Pg 85]
[Pg 85]
CHAPTER VIII
THE USE OF FOUR DIMENSIONS IN
THOUGHT
Having held before ourselves this outline of a conjecture of the world as four-dimensional, having roughly thrown together those facts of movement which we can see apply to our actual experience, let us pass to another branch of our subject.
Having laid out this idea of a four-dimensional world and loosely assembled the facts of movement that we observe in our actual experience, let's move on to another part of our topic.
The engineer uses drawings, graphical constructions, in a variety of manners. He has, for instance, diagrams which represent the expansion of steam, the efficiency of his valves. These exist alongside the actual plans of his machines. They are not the pictures of anything really existing, but enable him to think about the relations which exist in his mechanisms.
The engineer uses drawings and graphical designs in many ways. For example, he has diagrams that show the expansion of steam and the efficiency of his valves. These are alongside the actual plans of his machines. They aren't pictures of anything that exists in reality, but they help him think about the relationships within his mechanisms.
And so, besides showing us the actual existence of that world which lies beneath the one of visible movements, four-dimensional space enables us to make ideal constructions which serve to represent the relations of things, and throw what would otherwise be obscure into a definite and suggestive form.
And so, aside from demonstrating the real existence of that world beneath the one of visible movement, four-dimensional space allows us to create ideal representations that illustrate the relationships between things and clarify what would otherwise be unclear.
From amidst the great variety of instances which lies before me I will select two, one dealing with a subject of slight intrinsic interest, which however gives within a limited field a striking example of the method[Pg 86] of drawing conclusions and the use of higher space figures.[1]
From the wide range of examples in front of me, I will pick two, one that deals with a topic of little inherent interest but, within a limited scope, provides a striking illustration of the method[Pg 86] for drawing conclusions and using higher-dimensional figures.[1]
[1] It is suggestive also in another respect, because it shows very clearly that in our processes of thought there are in play faculties other than logical; in it the origin of the idea which proves to be justified is drawn from the consideration of symmetry, a branch of the beautiful.
[1] It also suggests something else because it clearly shows that our thinking involves more than just logical faculties; in it, the origin of the idea that turns out to be valid comes from the appreciation of symmetry, which is part of what we consider beautiful.
The other instance is chosen on account of the bearing it has on our fundamental conceptions. In it I try to discover the real meaning of Kant’s theory of experience.
The other example is selected because of its significance to our core ideas. In it, I attempt to uncover the true meaning of Kant’s theory of experience.
The investigation of the properties of numbers is much facilitated by the fact that relations between numbers are themselves able to be represented as numbers—e.g., 12, and 3 are both numbers, and the relation between them is 4, another number. The way is thus opened for a process of constructive theory, without there being any necessity for a recourse to another class of concepts besides that which is given in the phenomena to be studied.
The study of the properties of numbers is greatly helped by the fact that relationships between numbers can also be represented as numbers—e.g., 12 and 3 are both numbers, and their relationship is 4, which is another number. This allows for a constructive theory to be developed without needing to rely on a different class of concepts aside from those present in the phenomena being examined.
The discipline of number thus created is of great and varied applicability, but it is not solely as quantitative that we learn to understand the phenomena of nature. It is not possible to explain the properties of matter by number simply, but all the activities of matter are energies in space. They are numerically definite and also, we may say, directedly definite, i.e. definite in direction.
The field of mathematics we've developed has a wide range of applications, but we don't just learn to grasp natural phenomena through numbers. We can't explain the properties of matter solely by using numbers; rather, all the behaviors of matter are energies in space. They have specific numerical values and, we can also say, are definitively oriented, i.e. they have a specific direction.
Is there, then, a body of doctrine about space which, like that of number, is available in science? It is needless to answer: Yes; geometry. But there is a method lying alongside the ordinary methods of geometry, which tacitly used and presenting an analogy to the method of numerical thought deserves to be brought into greater prominence than it usually occupies.
Is there a set of principles about space that, like those of numbers, exists in science? The answer is clear: Yes; it's geometry. However, there’s a method that runs parallel to the usual techniques of geometry, one that is quietly used and shares similarities with numerical thinking, which deserves more attention than it typically gets.
The relation of numbers is a number.
The relationship between numbers is a number.
Can we say in the same way that the relation of shapes is a shape?
Can we say that the relationship between shapes is itself a shape?
We can.
We can do it.
[Pg 87]
[Pg 87]

To take an instance chosen on account of its ready availability. Let us take two right-angled triangles of a given hypothenuse, but having sides of different lengths (fig. 46). These triangles are shapes which have a certain relation to each other. Let us exhibit their relation as a figure.
To use an example that's easily accessible, let's consider two right-angled triangles with the same hypotenuse but different side lengths (fig. 46). These triangles are shapes that have a specific relationship with each other. Let's illustrate their relationship with a diagram.

Draw two straight lines at right angles to each other, the one HL a horizontal level, the other VL a vertical level (fig. 47). By means of these two co-ordinating lines we can represent a double set of magnitudes; one set as distances to the right of the vertical level, the other as distances above the horizontal level, a suitable unit being chosen.
Draw two straight lines at right angles to each other, one HL as a horizontal line and the other VL as a vertical line (fig. 47). These two coordinate lines allow us to represent a double set of magnitudes: one set as distances to the right of the vertical line, and the other as distances above the horizontal line, using an appropriate unit.
Thus the line marked 7 will pick out the assemblage of points whose distance from the vertical level is 7, and the line marked 1 will pick out the points whose distance above the horizontal level is 1. The meeting point of these two lines, 7 and 1, will define a point which with regard to the one set of magnitudes is 7, with regard to the other is 1. Let us take the sides of our triangles as the two sets of magnitudes in question.
Thus, the line labeled 7 will select the group of points that are 7 units away from the vertical level, and the line labeled 1 will select the points that are 1 unit above the horizontal level. The intersection of these two lines, 7 and 1, will define a point that measures 7 in relation to one set of values and 1 in relation to the other. Let's consider the sides of our triangles as the two sets of values in question.
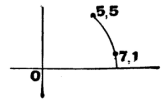
Then the point 7, 1, will represent the triangle whose sides are 7 and 1. Similarly the point 5, 5—5, that is, to the right of the vertical level and 5 above the horizontal level—will represent the triangle whose sides are 5 and 5 (fig. 48).
Then the point 7, 1 will represent the triangle with sides 7 and 1. Similarly, the point 5, 5—meaning 5 to the right of the vertical level and 5 above the horizontal level—will represent the triangle with sides 5 and 5 (fig. 48).
Thus we have obtained a figure consisting of the two points 7, 1, and 5, 5, representative of our two triangles. But we can go further, and, drawing an arc[Pg 88] of a circle about O, the meeting point of the horizontal and vertical levels, which passes through 7, 1, and 5, 5, assert that all the triangles which are right-angled and have a hypothenuse whose square is 50 are represented by the points on this arc.
Thus, we have a figure made up of the two points 7, 1, and 5, 5, which represent our two triangles. However, we can take it a step further by drawing an arc[Pg 88] of a circle around O, the intersection of the horizontal and vertical lines, that goes through 7, 1, and 5, 5. We can claim that all right-angled triangles with a hypotenuse whose square is 50 are represented by the points on this arc.
Thus, each individual of a class being represented by a point, the whole class is represented by an assemblage of points forming a figure. Accepting this representation we can attach a definite and calculable significance to the expression, resemblance, or similarity between two individuals of the class represented, the difference being measured by the length of the line between two representative points. It is needless to multiply examples, or to show how, corresponding to different classes of triangles, we obtain different curves.
Thus, each member of a class is represented by a point, and the entire class is represented by a collection of points forming a figure. Accepting this representation allows us to assign a clear and measurable meaning to the concept of resemblance or similarity between two individuals of the class being represented, with the difference measured by the length of the line between the two representative points. There’s no need to provide more examples or demonstrate how, for different classes of triangles, we derive different curves.
A representation of this kind in which an object, a thing in space, is represented as a point, and all its properties are left out, their effect remaining only in the relative position which the representative point bears to the representative points of the other objects, may be called, after the analogy of Sir William R. Hamilton’s hodograph, a “Poiograph.”
A representation like this, where an object or thing in space is shown as a point and all its properties are omitted, with its effect only visible in the relative position of that point to the points representing other objects, can be called, following the analogy of Sir William R. Hamilton’s hodograph, a “Poiograph.”
Representations thus made have the character of natural objects; they have a determinate and definite character of their own. Any lack of completeness in them is probably due to a failure in point of completeness of those observations which form the ground of their construction.
Representations made this way have the nature of natural objects; they possess a specific and definite character. Any incompleteness in them likely stems from a lack of completeness in the observations that serve as the basis for their creation.
Every system of classification is a poiograph. In Mendeléeff’s scheme of the elements, for instance, each element is represented by a point, and the relations between the elements are represented by the relations between the points.
Every classification system is a poiograph. In Mendeléeff’s arrangement of the elements, for example, each element is shown as a point, and the relationships between the elements are shown by the relationships between the points.
So far I have simply brought into prominence processes and considerations with which we are all familiar. But[Pg 89] it is worth while to bring into the full light of our attention our habitual assumptions and processes. It often happens that we find there are two of them which have a bearing on each other, which, without this dragging into the light, we should have allowed to remain without mutual influence.
So far, I've only highlighted processes and ideas that we all know. But[Pg 89] it's important to fully focus on our usual assumptions and methods. Often, we discover that two of these have an impact on each other, and without bringing them to light, we would have let them exist without affecting one another.
There is a fact which it concerns us to take into account in discussing the theory of the poiograph.
There’s a fact we need to consider when talking about the theory of the poiograph.
With respect to our knowledge of the world we are far from that condition which Laplace imagined when he asserted that an all-knowing mind could determine the future condition of every object, if he knew the co-ordinates of its particles in space, and their velocity at any particular moment.
With regard to our understanding of the world, we are far from the situation that Laplace envisioned when he claimed that an all-knowing mind could predict the future state of every object if it had the coordinates of its particles in space and their velocity at any given moment.
On the contrary, in the presence of any natural object, we have a great complexity of conditions before us, which we cannot reduce to position in space and date in time.
On the contrary, when faced with any natural object, we encounter a lot of complex conditions that we can’t simply boil down to its location in space and a specific time.
There is mass, attraction apparently spontaneous, electrical and magnetic properties which must be superadded to spatial configuration. To cut the list short we must say that practically the phenomena of the world present us problems involving many variables, which we must take as independent.
There is mass, attraction that seems spontaneous, and electrical and magnetic properties that must be added to spatial configuration. To keep it brief, we can say that the phenomena of the world present us with problems involving many variables, which we should treat as independent.
From this it follows that in making poiographs we must be prepared to use space of more than three dimensions. If the symmetry and completeness of our representation is to be of use to us we must be prepared to appreciate and criticise figures of a complexity greater than of those in three dimensions. It is impossible to give an example of such a poiograph which will not be merely trivial, without going into details of some kind irrelevant to our subject. I prefer to introduce the irrelevant details rather than treat this part of the subject perfunctorily.
From this, it follows that when creating poiographs, we need to be ready to work with more than three dimensions. If we want our representation to be symmetrical and complete, we must be willing to understand and evaluate figures that are more complex than those in three dimensions. It’s impossible to provide an example of such a poiograph that isn't just trivial without getting into details that are unrelated to our topic. I’d rather include those unrelated details than address this part of the subject half-heartedly.
To take an instance of a poiograph which does not lead[Pg 90] us into the complexities incident on its application in classificatory science, let us follow Mrs. Alicia Boole Stott in her representation of the syllogism by its means. She will be interested to find that the curious gap she detected has a significance.
To provide an example of a poiograph that doesn't get us tangled up in the complexities of its use in classification science, let's consider Mrs. Alicia Boole Stott and how she illustrates the syllogism with it. She'll be intrigued to discover that the interesting gap she noticed has importance.
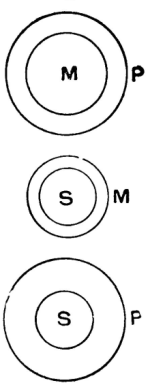
A syllogism consists of two statements, the major and the minor premiss, with the conclusion that can be drawn from them. Thus, to take an instance, fig. 49. It is evident, from looking at the successive figures that, if we know that the region M lies altogether within the region P, and also know that the region S lies altogether within the region M, we can conclude that the region S lies altogether within the region P. M is P, major premiss; S is M, minor premiss; S is P, conclusion. Given the first two data we must conclude that S lies in P. The conclusion S is P involves two terms, S and P, which are respectively called the subject and the predicate, the letters S and P being chosen with reference to the parts the notions they designate play in the conclusion. S is the subject of the conclusion, P is the predicate of the conclusion. The major premiss we take to be, that which does not involve S, and here we always write it first.
A syllogism consists of two statements: the major premise and the minor premise, along with the conclusion that can be drawn from them. For example, fig. 49. It’s clear from examining the successive figures that if we know the area M is completely inside the area P, and we also know that the area S is completely inside the area M, we can conclude that the area S is completely inside the area P. M is P, major premise; S is M, minor premise; S is P, conclusion. Given the first two pieces of information, we must conclude that S is in P. The conclusion S is P involves two terms, S and P, which are referred to as the subject and the predicate, with the letters S and P chosen according to the roles they play in the conclusion. S is the subject of the conclusion, and P is the predicate of the conclusion. We consider the major premise to be the one that does not involve S, and we always write it first.
There are several varieties of statement possessing different degrees of universality and manners of assertiveness. These different forms of statement are called the moods.
There are several types of statements that have different levels of universality and ways of being assertive. These different forms of statements are referred to as moods.
We will take the major premiss as one variable, as a thing capable of different modifications of the same kind, the minor premiss as another, and the different moods we will consider as defining the variations which these variables undergo.
We will treat the major premise as one variable, something that can have different modifications of the same type, the minor premise as another variable, and the different moods we will view as defining the variations these variables experience.
[Pg 91]
[Pg 91]
There are four moods:—
There are four moods:
1. The universal affirmative; all M is P, called mood A.
1. The universal affirmative; all M is P, called mood A.
2. The universal negative; no M is P, mood E.
2. The universal negative; no M is P, mood E.
3. The particular affirmative; some M is P, mood I.
3. The specific affirmative; some M is P, mood I.
4. The particular negative; some M is not P, mood O.
4. The specific negative; some M is not P, mood O.

The dotted lines in 3 and 4, fig. 50, denote that it is not known whether or no any objects exist, corresponding to the space of which the dotted line forms one delimiting boundary; thus, in mood I we do not know if there are any M’s which are not P, we only know some M’s are P.
The dotted lines in 3 and 4, fig. 50, indicate that it's uncertain whether any objects exist that correspond to the area marked by the dotted line, which serves as one boundary. Therefore, in mood I, we don't know if there are any M’s that are not P; we only know that some M’s are P.

Representing the first premiss in its various moods by regions marked by vertical lines to the right of PQ, we have in fig. 51, running up from the four letters AEIO, four columns, each of which indicates that the major premiss is in the mood denoted by the respective letter. In the first column to the right of PQ is the mood A. Now above the line RS let there be marked off four regions corresponding to the four moods of the minor premiss. Thus, in the first row above RS all the region between RS and the first horizontal line above it denotes that the minor premiss is in the mood A. The[Pg 92] letters E, I, O, in the same way show the mood characterising the minor premiss in the rows opposite these letters.
Representing the first premise in its various forms by regions marked with vertical lines to the right of PQ, we have in fig. 51, extending from the four letters AEIOU, four columns, each indicating that the major premise is in the mood represented by the corresponding letter. In the first column to the right of PQ is the mood A. Now, above the line RS, we should mark off four regions corresponding to the four moods of the minor premise. Thus, in the first row above RS, the region between RS and the first horizontal line above it indicates that the minor premise is in the mood A. The letters E, I, O, in the same way, show the mood characterizing the minor premise in the rows opposite these letters.
We have still to exhibit the conclusion. To do this we must consider the conclusion as a third variable, characterised in its different varieties by four moods—this being the syllogistic classification. The introduction of a third variable involves a change in our system of representation.
We still need to show the conclusion. To do this, we must think of the conclusion as a third variable, characterized in its different forms by four moods—this is the syllogistic classification. The introduction of a third variable means changing our system of representation.

Before we started with the regions to the right of a certain line as representing successively the major premiss in its moods; now we must start with the regions to the right of a certain plane. Let LMNR be the plane face of a cube, fig. 52, and let the cube be divided into four parts by vertical sections parallel to LMNR. The variable, the major premiss, is represented by the successive regions which occur to the right of the plane LMNR—that region to which A stands opposite, that slice of the cube, is significative of the mood A. This whole quarter-part of the cube represents that for every part of it the major premiss is in the mood A.
Before we started with the areas to the right of a certain line to represent the major premise in its various forms; now we need to begin with the areas to the right of a certain plane. Let LMNR be the flat surface of a cube, fig. 52, and let the cube be split into four sections by vertical cuts parallel to LMNR. The variable, the major premise, is shown through the successive areas that appear to the right of the plane LMNR—the area opposite A, that portion of the cube, signifies the mood A. This entire quarter of the cube indicates that for every part of it, the major premise is in the mood A.
In a similar manner the next section, the second with the letter E opposite it, represents that for every one of the sixteen small cubic spaces in it, the major premiss is in the mood E. The third and fourth compartments made by the vertical sections denote the major premiss in the moods I and O. But the cube can be divided in other ways by other planes. Let the divisions, of which four stretch from the front face, correspond to the minor premiss. The first wall of sixteen cubes, facing the observer, has as its characteristic that in each of the small cubes, whatever else may be the case, the minor premiss is in the mood A. The variable—the minor premiss—varies through the phases A, E, I, O, away from the front face of the cube, or the front plane of which the front face is a part.
In a similar way, the next section, the second with the letter E opposite it, indicates that for each of the sixteen small cubic spaces in it, the main premise is in the mood E. The third and fourth sections created by the vertical dividers represent the main premise in the moods I and O. However, the cube can be divided in different ways by other planes. Let the divisions, four of which extend from the front face, correspond to the minor premise. The first wall of sixteen cubes, facing the observer, has the characteristic that in each of the small cubes, regardless of other factors, the minor premise is in the mood A. The variable—the minor premise—changes through the phases A, E, I, O, moving away from the front face of the cube, or the front plane of which the front face is a part.
[Pg 93]
[Pg 93]
And now we can represent the third variable in a precisely similar way. We can take the conclusion as the third variable, going through its four phases from the ground plane upwards. Each of the small cubes at the base of the whole cube has this true about it, whatever else may be the case, that the conclusion is, in it, in the mood A. Thus, to recapitulate, the first wall of sixteen small cubes, the first of the four walls which, proceeding from left to right, build up the whole cube, is characterised in each part of it by this, that the major premiss is in the mood A.
And now we can represent the third variable in exactly the same way. We can take the conclusion as the third variable, moving through its four phases from the ground level up. Each of the small cubes at the bottom of the entire cube has this fact, no matter what else is true, that the conclusion is, in it, in the mood A. So, to summarize, the first wall of sixteen small cubes, the first of the four walls that, going from left to right, create the whole cube, is defined in each part by the fact that the major premise is in the mood A.
The next wall denotes that the major premiss is in the mood E, and so on. Proceeding from the front to the back the first wall presents a region in every part of which the minor premiss is in the mood A. The second wall is a region throughout which the minor premiss is in the mood E, and so on. In the layers, from the bottom upwards, the conclusion goes through its various moods beginning with A in the lowest, E in the second, I in the third, O in the fourth.
The next wall indicates that the major premise is in mood E, and so on. Moving from the front to the back, the first wall shows a section where the minor premise is in mood A. The second wall is a section where the minor premise is in mood E, and so on. In the layers, starting from the bottom, the conclusion goes through its different moods, starting with A at the lowest, E in the second, I in the third, and O in the fourth.
In the general case, in which the variables represented in the poiograph pass through a wide range of values, the planes from which we measure their degrees of variation in our representation are taken to be indefinitely extended. In this case, however, all we are concerned with is the finite region.
In general, when the variables shown in the poiograph vary widely, the planes from which we measure their degrees of variation in our representation are considered to be infinitely extended. However, in this case, we are only focused on the finite region.
We have now to represent, by some limitation of the complex we have obtained, the fact that not every combination of premisses justifies any kind of conclusion. This can be simply effected by marking the regions in which the premisses, being such as are defined by the positions, a conclusion which is valid is found.
We now need to show, by placing some limits on the complex we've created, that not every combination of premises supports any type of conclusion. This can be easily done by highlighting the areas where the premises, as defined by their positions, lead to a valid conclusion.
Taking the conjunction of the major premiss, all M is P, and the minor, all S is M, we conclude that all S is P. Hence, that region must be marked in which we have the conjunction of major premiss in mood A; minor premiss,[Pg 94] mood A; conclusion, mood A. This is the cube occupying the lowest left-hand corner of the large cube.
Taking the combination of the major premise, all M is P, and the minor premise, all S is M, we conclude that all S is P. Therefore, we need to identify the area where we have the combination of the major premise in mood A; minor premise, mood A; conclusion, mood A. This is the cube located in the lowest left corner of the larger cube.

Proceeding in this way, we find that the regions which must be marked are those shown in fig. 53. To discuss the case shown in the marked cube which appears at the top of fig. 53. Here the major premiss is in the second wall to the right—it is in the mood E and is of the type no M is P. The minor premiss is in the mood characterised by the third wall from the front. It is of the type some S is M. From these premisses we draw the conclusion that some S is not P, a conclusion in the mood O. Now the mood O of the conclusion is represented in the top layer. Hence we see that the marking is correct in this respect.
Proceeding this way, we find that the areas that need to be marked are those shown in fig. 53. To discuss the case presented in the marked cube at the top of fig. 53, the major premise is in the second wall to the right—it is in the mood E and is of the type no M is P. The minor premise is in the mood characterized by the third wall from the front. It is of the type some S is M. From these premises, we conclude that some S is not P, a conclusion in the mood O. Now the mood O of the conclusion is represented in the top layer. Therefore, we can see that the marking is correct in this aspect.
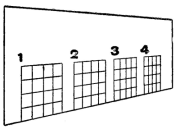
It would, of course, be possible to represent the cube on a plane by means of four squares, as in fig. 54, if we consider each square to represent merely the beginning of the region it stands for. Thus the whole cube can be represented by four vertical squares, each standing for a kind of vertical tray, and the markings would be as shown. In No. 1 the major premiss is in mood A for the whole of the region indicated by the vertical square of sixteen divisions; in No. 2 it is in the mood E, and so on.
It would definitely be possible to represent the cube on a flat surface using four squares, as shown in fig. 54, if we view each square as just the starting point of the area it represents. This way, the entire cube can be depicted with four vertical squares, each symbolizing a type of vertical tray, and the markings would appear as shown. In No. 1, the main premise is in mood A for the entire area indicated by the vertical square divided into sixteen sections; in No. 2, it is in mood E, and so on.
A creature confined to a plane would have to adopt some such disjunctive way of representing the whole cube. He would be obliged to represent that which we see as a whole in separate parts, and each part would merely represent, would not be, that solid content which we see.
A creature stuck on a flat surface would have to find a different way to show the entire cube. It would have to break down what we see as a whole into individual pieces, and each piece would only represent, not actually be, that solid mass we perceive.
[Pg 95]
[Pg 95]
The view of these four squares which the plane creature would have would not be such as ours. He would not see the interior of the four squares represented above, but each would be entirely contained within its outline, the internal boundaries of the separate small squares he could not see except by removing the outer squares.
The perspective of these four squares that a being in a different dimension would have wouldn’t be the same as ours. They wouldn’t see the insides of the four squares shown above; instead, each one would be completely enclosed within its outline. The internal edges of the smaller squares would be invisible to them unless they removed the outer squares.
We are now ready to introduce the fourth variable involved in the syllogism.
We’re now ready to introduce the fourth variable involved in the syllogism.
In assigning letters to denote the terms of the syllogism we have taken S and P to represent the subject and predicate in the conclusion, and thus in the conclusion their order is invariable. But in the premisses we have taken arbitrarily the order all M is P, and all S is M. There is no reason why M instead of P should not be the predicate of the major premiss, and so on.
In assigning letters to represent the terms of the syllogism, we have chosen S and P to represent the subject and predicate in the conclusion, which means their order remains constant. However, in the premises, we have arbitrarily selected the order to be all M is P, and all S is M. There’s no reason why M couldn’t instead be the predicate of the major premise, and so on.
Accordingly we take the order of the terms in the premisses as the fourth variable. Of this order there are four varieties, and these varieties are called figures.
Accordingly, we consider the arrangement of the terms in the premises as the fourth variable. There are four different ways to arrange them, and these arrangements are called figures.
Using the order in which the letters are written to denote that the letter first written is subject, the one written second is predicate, we have the following possibilities:—
Using the order in which the letters are written to indicate that the first letter written is the subject, and the second letter is the predicate, we have the following possibilities:—
| 1st Figure. | 2nd Figure. | 3rd Figure. | 4th Figure. | |
| Major | M P | P M | M P | P M |
| Minor | S M | S M | M S | M S |
There are therefore four possibilities with regard to this fourth variable as with regard to the premisses.
There are four possibilities concerning this fourth variable, just like there are for the premises.
We have used up our dimensions of space in representing the phases of the premisses and the conclusion in respect of mood, and to represent in an analogous manner the variations in figure we require a fourth dimension.
We have exhausted our spatial dimensions in showing the phases of the premises and the conclusion in terms of mood, and to represent the changes in figure similarly, we need a fourth dimension.
Now in bringing in this fourth dimension we must make a change in our origins of measurement analogous to that which we made in passing from the plane to the solid.
Now, in introducing this fourth dimension, we need to adjust our methods of measurement in a way similar to how we transitioned from two-dimensional planes to three-dimensional solids.
[Pg 96]
[Pg 96]
This fourth dimension is supposed to run at right angles to any of the three space dimensions, as the third space dimension runs at right angles to the two dimensions of a plane, and thus it gives us the opportunity of generating a new kind of volume. If the whole cube moves in this dimension, the solid itself traces out a path, each section of which, made at right angles to the direction in which it moves, is a solid, an exact repetition of the cube itself.
This fourth dimension is said to be oriented at right angles to the three spatial dimensions, just like the third spatial dimension is positioned at right angles to the two dimensions of a plane. This provides us with the chance to create a new type of volume. If the entire cube moves in this dimension, the solid itself follows a path, with each cross-section, made at right angles to the direction of movement, being a solid that is an exact replica of the original cube.
The cube as we see it is the beginning of a solid of such a kind. It represents a kind of tray, as the square face of the cube is a kind of tray against which the cube rests.
The cube, as we understand it, marks the start of a solid shape of this type. It serves as a sort of tray, with the square face of the cube acting like a tray that supports the cube.
Suppose the cube to move in this fourth dimension in four stages, and let the hyper-solid region traced out in the first stage of its progress be characterised by this, that the terms of the syllogism are in the first figure, then we can represent in each of the three subsequent stages the remaining three figures. Thus the whole cube forms the basis from which we measure the variation in figure. The first figure holds good for the cube as we see it, and for that hyper-solid which lies within the first stage; the second figure holds good in the second stage, and so on.
Suppose the cube moves through this fourth dimension in four stages. Let's say the hyper-solid area outlined in the first stage is defined by the terms of the syllogism being in the first figure. We can then represent the remaining three figures in each of the three subsequent stages. Thus, the entire cube serves as the foundation for measuring changes in figures. The first figure applies to the cube as we perceive it, as well as to that hyper-solid which exists in the first stage; the second figure applies in the second stage, and so on.
Thus we measure from the whole cube as far as figures are concerned.
Thus, we measure from the entire cube when it comes to figures.
But we saw that when we measured in the cube itself having three variables, namely, the two premisses and the conclusion, we measured from three planes. The base from which we measured was in every case the same.
But we noticed that when we measured in the cube itself with three variables - the two premises and the conclusion - we measured from three planes. The base we measured from was the same in every case.
Hence, in measuring in this higher space we should have bases of the same kind to measure from, we should have solid bases.
Hence, when measuring in this higher space, we should have bases of the same kind to measure from; we need to have solid bases.
The first solid base is easily seen, it is the cube itself. The other can be found from this consideration.
The first solid base is easy to see; it's the cube itself. The other can be found from this perspective.
That solid from which we measure figure is that in[Pg 97] which the remaining variables run through their full range of varieties.
That solid we use to measure shape is the one in which the other variables go through their complete range of variations.[Pg 97]
Now, if we want to measure in respect of the moods of the major premiss, we must let the minor premiss, the conclusion, run through their range, and also the order of the terms. That is we must take as basis of measurement in respect to the moods of the major that which represents the variation of the moods of the minor, the conclusion and the variation of the figures.
Now, if we want to measure the moods of the major premise, we need to let the minor premise and the conclusion go through their range, along with the order of the terms. In other words, we must base our measurements of the moods of the major premise on what represents the variations in the moods of the minor premise, the conclusion, and the variations of the figures.
Now the variation of the moods of the minor and of the conclusion are represented in the square face on the left of the cube. Here are all varieties of the minor premiss and the conclusion. The varieties of the figures are represented by stages in a motion proceeding at right angles to all space directions, at right angles consequently to the face in question, the left-hand face of the cube.
Now, the different moods of the minor premise and the conclusion are shown in the square face on the left side of the cube. This face displays all the variations of the minor premise and the conclusion. The different figures are depicted by stages in a motion that moves at right angles to all directions in space, and, therefore, at right angles to the face in question, which is the left face of the cube.
Consequently letting the left-hand face move in this direction we get a cube, and in this cube all the varieties of the minor premiss, the conclusion, and the figure are represented.
Consequently, by allowing the left face to move in this direction, we create a cube, and within this cube, all the variations of the minor premise, the conclusion, and the figure are represented.
Thus another cubic base of measurement is given to the cube, generated by movement of the left-hand square in the fourth dimension.
Thus another cubic unit of measurement is provided to the cube, created by the movement of the left-hand square in the fourth dimension.
We find the other bases in a similar manner, one is the cube generated by the front square moved in the fourth dimension so as to generate a cube. From this cube variations in the mood of the minor are measured. The fourth base is that found by moving the bottom square of the cube in the fourth dimension. In this cube the variations of the major, the minor, and the figure are given. Considering this as a basis in the four stages proceeding from it, the variation in the moods of the conclusion are given.
We find the other bases in a similar way; one is the cube created by moving the front square into the fourth dimension to form a cube. From this cube, we measure variations in the mood of the minor. The fourth base is established by moving the bottom square of the cube into the fourth dimension. In this cube, the variations of the major, minor, and the figure are presented. When considering this as a foundation, the variations in the moods of the conclusion are identified through the four stages that follow it.
Any one of these cubic bases can be represented in space, and then the higher solid generated from them lies out of[Pg 98] our space. It can only be represented by a device analogous to that by which the plane being represents a cube.
Any of these cubic bases can be shown in space, and the higher solid formed from them exists outside of[Pg 98] our space. It can only be represented by a method similar to how a two-dimensional shape represents a cube.
He represents the cube shown above, by taking four square sections and placing them arbitrarily at convenient distances the one from the other.
He represents the cube shown above by taking four square sections and placing them randomly at convenient distances from each other.
So we must represent this higher solid by four cubes: each cube represents only the beginning of the corresponding higher volume.
So we need to represent this larger shape with four cubes: each cube only represents the starting point of the corresponding larger volume.
It is sufficient for us, then, if we draw four cubes, the first representing that region in which the figure is of the first kind, the second that region in which the figure is of the second kind, and so on. These cubes are the beginnings merely of the respective regions—they are the trays, as it were, against which the real solids must be conceived as resting, from which they start. The first one, as it is the beginning of the region of the first figure, is characterised by the order of the terms in the premisses being that of the first figure. The second similarly has the terms of the premisses in the order of the second figure, and so on.
It’s enough for us to draw four cubes, with the first one showing the area for the first type of figure, the second for the second type, and so on. These cubes are just the starting points of their respective areas—they serve as the bases for the actual solids that we imagine sitting on them. The first cube, as it starts the region of the first figure, is defined by the order of the terms in the premises being that of the first figure. The second cube also has the terms of the premises arranged according to the second figure, and so forth.
These cubes are shown below.
These cubes are shown here.
For the sake of showing the properties of the method of representation, not for the logical problem, I will make a digression. I will represent in space the moods of the minor and of the conclusion and the different figures, keeping the major always in mood A. Here we have three variables in different stages, the minor, the conclusion, and the figure. Let the square of the left-hand side of the original cube be imagined to be standing by itself, without the solid part of the cube, represented by (2) fig. 55. The A, E, I, O, which run away represent the moods of the minor, the A, E, I, O, which run up represent the moods of the conclusion. The whole square, since it is the beginning of the region in the major premiss, mood A, is to be considered as in major premiss, mood A.
To demonstrate the properties of the representation method, rather than the logical issue, I’ll take a detour. I will illustrate in space the moods of the minor premise and conclusion, along with the different figures, while keeping the major premise always in mood A. Here we have three variables at different stages: the minor premise, the conclusion, and the figure. Imagine the square on the left side of the original cube standing alone, without the solid part of the cube, represented by (2) fig. 55. The A, E, I, O that move away represent the moods of the minor premise, while the A, E, I, O that move upward signify the moods of the conclusion. The entire square, since it serves as the beginning of the region in the major premise, mood A, is to be considered as in the major premise, mood A.
[Pg 99]
[Pg 99]
From this square, let it be supposed that that direction in which the figures are represented runs to the left hand. Thus we have a cube (1) running from the square above, in which the square itself is hidden, but the letters A, E, I, O, of the conclusion are seen. In this cube we have the minor premiss and the conclusion in all their moods, and all the figures represented. With regard to the major premiss, since the face (2) belongs to the first wall from the left in the original arrangement, and in this arrangement was characterised by the major premiss in the mood A, we may say that the whole of the cube we now have put up represents the mood A of the major premiss.
From this square, let’s assume that the direction where the figures are shown goes to the left. So, we have a cube (1) extending from the square above, where the square itself is hidden, but we can see the letters A, E, I, O, which represent the conclusion. In this cube, we have the minor premise and the conclusion presented in all their moods, along with all the figures shown. As for the major premise, since the face (2) belongs to the first wall from the left in the original setup and is identified by the major premise in the mood A, we can say that the entire cube we’ve created represents the mood A of the major premise.
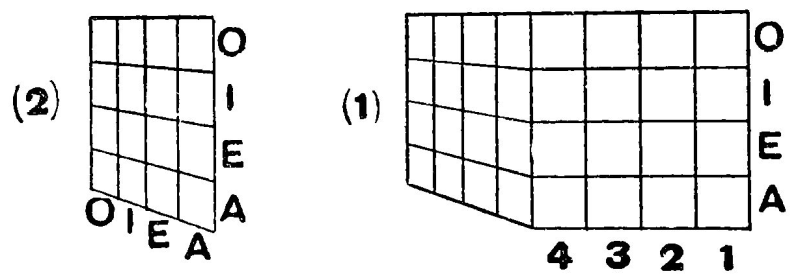
Hence the small cube at the bottom to the right in 1, nearest to the spectator, is major premiss, mood A; minor premiss, mood A; conclusion, mood A; and figure the first. The cube next to it, running to the left, is major premiss, mood A; minor premiss, mood A; conclusion, mood A; figure 2.
Hence, the small cube at the bottom right in 1, closest to the viewer, is the major premise, mood A; minor premise, mood A; conclusion, mood A; and figure the first. The cube next to it, extending left, is the major premise, mood A; minor premise, mood A; conclusion, mood A; figure 2.
So in this cube we have the representations of all the combinations which can occur when the major premiss, remaining in the mood A, the minor premiss, the conclusion, and the figures pass through their varieties.
So in this cube, we have representations of all the combinations that can happen when the major premise stays in mood A, the minor premise, the conclusion, and the figures go through their variations.
In this case there is no room in space for a natural representation of the moods of the major premiss. To represent them we must suppose as before that there is a fourth dimension, and starting from this cube as base in the fourth direction in four equal stages, all the first volume corresponds to major premiss A, the second to major[Pg 100] premiss, mood E, the next to the mood I, and the last to mood O.
In this case, there's no physical space to naturally represent the moods of the major premise. To illustrate them, we need to assume, as we did before, that there is a fourth dimension. Starting from this cube as a base and moving in the fourth direction in four equal stages, the entire first volume corresponds to major premise A, the second to major premise, mood E, the next to mood I, and the last to mood O.
The cube we see is as it were merely a tray against which the four-dimensional figure rests. Its section at any stage is a cube. But a transition in this direction being transverse to the whole of our space is represented by no space motion. We can exhibit successive stages of the result of transference of the cube in that direction, but cannot exhibit the product of a transference, however small, in that direction.
The cube we see is essentially just a tray that the four-dimensional figure sits on. Its cross-section at any point is a cube. However, a shift in this direction is perpendicular to our entire space and isn’t shown by any movement in space. We can display the different stages of the cube being transferred in that direction, but we can't actually demonstrate the outcome of even the tiniest shift in that direction.
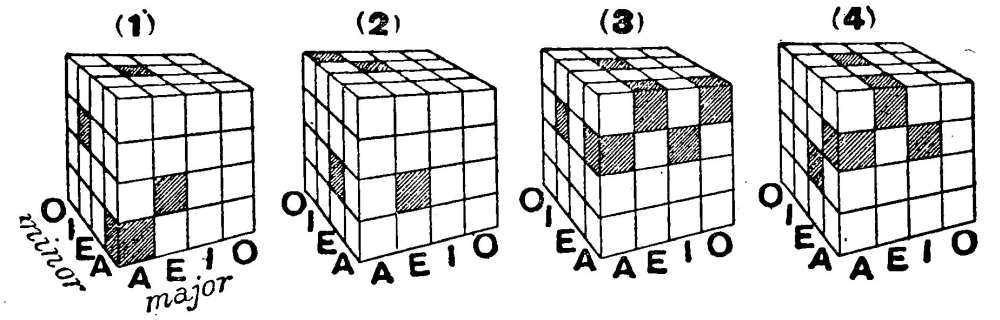
To return to the original method of representing our variables, consider fig. 56. These four cubes represent four sections of the figure derived from the first of them by moving it in the fourth dimension. The first portion of the motion, which begins with 1, traces out a more than solid body, which is all in the first figure. The beginning of this body is shown in 1. The next portion of the motion traces out a more than solid body, all of which is in the second figure; the beginning of this body is shown in 2; 3 and 4 follow on in like manner. Here, then, in one four-dimensional figure we have all the combinations of the four variables, major premiss, minor premiss, figure, conclusion, represented, each variable going through its four varieties. The disconnected cubes drawn are our representation in space by means of disconnected sections of this higher body.
To go back to the original way of representing our variables, take a look at fig. 56. These four cubes represent four sections of the figure that comes from the first one by shifting it in the fourth dimension. The first part of the motion starts with 1, outlining a more than solid body, which is all in the first figure. The start of this body is shown in 1. The next part of the motion outlines another more than solid body, which is entirely in the second figure; the start of this body is shown in 2; 3 and 4 continue in the same way. So, in this single four-dimensional figure, we have all the combinations of the four variables—major premise, minor premise, figure, conclusion—represented, with each variable going through its four forms. The separate cubes drawn here are our representation in space using these disconnected sections of this higher body.
[Pg 101]
[Pg 101]
Now it is only a limited number of conclusions which are true—their truth depends on the particular combinations of the premisses and figures which they accompany. The total figure thus represented may be called the universe of thought in respect to these four constituents, and out of the universe of possibly existing combinations it is the province of logic to select those which correspond to the results of our reasoning faculties.
Now, there are only a few conclusions that are true—their truth relies on the specific combinations of the premises and figures that go along with them. The entire figure represented can be referred to as the universe of thought concerning these four components, and from the universe of potentially existing combinations, it is the role of logic to choose those that match the results of our reasoning abilities.
We can go over each of the premisses in each of the moods, and find out what conclusion logically follows. But this is done in the works on logic; most simply and clearly I believe in “Jevon’s Logic.” As we are only concerned with a formal presentation of the results we will make use of the mnemonic lines printed below, in which the words enclosed in brackets refer to the figures, and are not significative:—
We can review each of the premises in all the different moods and figure out what conclusion follows logically. This is covered in the works on logic; most straightforwardly and clearly, I believe in “Jevon’s Logic.” Since we're only focused on a formal presentation of the results, we will use the mnemonic lines printed below, where the words in brackets refer to the figures and are not significant:—
- Barbara celarent Darii ferioque [prioris].
- Caesare Camestris Festino Baroko [secundae].
- [Tertia] darapti disamis datisi felapton.
- Bokardo ferisson habet [Quarta insuper addit].
- Bramantip camenes dimaris ferapton fresison.
In these lines each significative word has three vowels, the first vowel refers to the major premiss, and gives the mood of that premiss, “a” signifying, for instance, that the major mood is in mood a. The second vowel refers to the minor premiss, and gives its mood. The third vowel refers to the conclusion, and gives its mood. Thus (prioris)—of the first figure—the first mnemonic word is “barbara,” and this gives major premiss, mood A; minor premiss, mood A; conclusion, mood A. Accordingly in the first of our four cubes we mark the lowest left-hand front cube. To take another instance in the third figure “Tertia,” the word “ferisson” gives us major premiss mood E—e.g., no M is P, minor premiss mood I; some M is S, conclusion, mood O; some S is not P. The region to be marked then[Pg 102] in the third representative cube is the one in the second wall to the right for the major premiss, the third wall from the front for the minor premiss, and the top layer for the conclusion.
In these lines, each significant word has three vowels. The first vowel refers to the major premise and indicates its mood, with "a" signifying that the major mood is in mood a. The second vowel refers to the minor premise and indicates its mood. The third vowel refers to the conclusion and indicates its mood. Thus, in the first figure, the first mnemonic word is "barbara," which provides the major premise, mood A; minor premise, mood A; conclusion, mood A. Accordingly, in the first of our four cubes, we identify the lowest left-hand front cube. To take another example in the third figure "Tertia," the word "ferisson" gives us the major premise mood E—e.g., no M is P, minor premise mood I; some M is S, conclusion mood O; some S is not P. The area to be marked in the third representative cube is the one on the second wall to the right for the major premise, the third wall from the front for the minor premise, and the top layer for the conclusion. [Pg 102]
It is easily seen that in the diagram this cube is marked, and so with all the valid conclusions. The regions marked in the total region show which combinations of the four variables, major premiss, minor premiss, figure, and conclusion exist.
It’s clear from the diagram that this cube is marked, along with all the valid conclusions. The areas highlighted in the overall region indicate which combinations of the four variables—major premise, minor premise, figure, and conclusion—are present.
That is to say, we objectify all possible conclusions, and build up an ideal manifold, containing all possible combinations of them with the premisses, and then out of this we eliminate all that do not satisfy the laws of logic. The residue is the syllogism, considered as a canon of reasoning.
That means we look at all possible conclusions and create an ideal set that includes all possible combinations of them with the premises. Then, we remove everything that doesn't follow the laws of logic. What we have left is the syllogism, seen as a guideline for reasoning.
Looking at the shape which represents the totality of the valid conclusions, it does not present any obvious symmetry, or easily characterisable nature. A striking configuration, however, is obtained, if we project the four-dimensional figure obtained into a three-dimensional one; that is, if we take in the base cube all those cubes which have a marked space anywhere in the series of four regions which start from that cube.
Looking at the shape that represents all the valid conclusions, it doesn't show any clear symmetry or easily defined characteristics. However, a noteworthy configuration appears when we project the four-dimensional figure into three dimensions; that is, if we include in the base cube all the cubes that have a significant space at any point in the series of four regions starting from that cube.
This corresponds to making abstraction of the figures, giving all the conclusions which are valid whatever the figure may be.
This means ignoring the specifics and providing all the conclusions that are valid regardless of the details.

Proceeding in this way we obtain the arrangement of marked cubes shown in fig. 57. We see that the valid conclusions are arranged almost symmetrically round one cube—the one on the top of the column starting from AAA. There is one breach of continuity however in this scheme. One cube is unmarked, which if marked would give symmetry. It is the one which would be denoted by the[Pg 103] letters I, E, O, in the third wall to the right, the second wall away, the topmost layer. Now this combination of premisses in the mood IE, with a conclusion in the mood O, is not noticed in any book on logic with which I am familiar. Let us look at it for ourselves, as it seems that there must be something curious in connection with this break of continuity in the poiograph.
Proceeding this way, we get the arrangement of the marked cubes shown in fig. 57. We can see that the valid conclusions are almost symmetrically arranged around one cube—the one at the top of the column starting from AAA. However, there is one gap in this setup. One cube is unmarked, and if it were marked, it would create symmetry. It's the one represented by the [Pg 103] letters I, E, O, in the third wall to the right, the second wall away, at the topmost layer. Now, this combination of premises in the mood IE, with a conclusion in the mood O, isn't mentioned in any logic books I'm familiar with. Let's examine it ourselves, as there seems to be something interesting about this break in continuity in the poiograph.

The propositions I, E, in the various figures are the following, as shown in the accompanying scheme, fig. 58:—First figure: some M is P; no S is M. Second figure: some P is M; no S is M. Third figure: some M is P; no M is S. Fourth figure: some P is M; no M is S.
The propositions I, E, in the different figures are as follows, as illustrated in the accompanying diagram, fig. 58:—First figure: some M is P; no S is M. Second figure: some P is M; no S is M. Third figure: some M is P; no M is S. Fourth figure: some P is M; no M is S.
Examining these figures, we see, taking the first, that if some M is P and no S is M, we have no conclusion of[Pg 104] the form S is P in the various moods. It is quite indeterminate how the circle representing S lies with regard to the circle representing P. It may lie inside, outside, or partly inside P. The same is true in the other figures 2 and 3. But when we come to the fourth figure, since M and S lie completely outside each other, there cannot lie inside S that part of P which lies inside M. Now we know by the major premiss that some of P does lie in M. Hence S cannot contain the whole of P. In words, some P is M, no M is S, therefore S does not contain the whole of P. If we take P as the subject, this gives us a conclusion in the mood O about P. Some P is not S. But it does not give us conclusion about S in any one of the four forms recognised in the syllogism and called its moods. Hence the breach of the continuity in the poiograph has enabled us to detect a lack of completeness in the relations which are considered in the syllogism.
Examining these figures, we see that if some M is P and no S is M, we can't conclude that S is P in any of the different moods. It's unclear how the circle representing S relates to the circle representing P. It could be inside, outside, or partially overlapping P. The same applies to the other figures 2 and 3. However, in the fourth figure, because M and S are completely separate, the part of P that lies within M cannot be inside S. We also know from the major premise that some of P exists within M. Therefore, S cannot encompass all of P. In other words, since some P is M and no M is S, it follows that S does not contain all of P. If we take P as the subject, this results in a conclusion in the mood O regarding P: some P is not S. However, it does not provide a conclusion about S in any of the four forms recognized in syllogism, referred to as its moods. Thus, the break in continuity in the poiograph has helped us identify an incompleteness in the relationships considered in the syllogism.
To take an instance:—Some Americans (P) are of African stock (M); No Aryans (S) are of African stock (M); Aryans (S) do not include all of Americans (P).
To give an example: Some Americans (P) are of African descent (M); No Aryans (S) are of African descent (M); Aryans (S) do not encompass all Americans (P).
In order to draw a conclusion about S we have to admit the statement, “S does not contain the whole of P,” as a valid logical form—it is a statement about S which can be made. The logic which gives us the form, “some P is not S,” and which does not allow us to give the exactly equivalent and equally primary form, “S does not contain the whole of P,” is artificial.
To conclude about S, we have to accept the statement, “S does not contain the whole of P,” as a valid logical form—it’s a statement about S that we can make. The logic that gives us the form, “some P is not S,” and does not allow us to express the exactly equivalent and equally primary form, “S does not contain the whole of P,” is artificial.
And I wish to point out that this artificiality leads to an error.
And I want to point out that this artificiality leads to a mistake.
If one trusted to the mnemonic lines given above, one would conclude that no logical conclusion about S can be drawn from the statement, “some P are M, no M are S.”
If someone relied on the mnemonic lines mentioned above, they would conclude that no logical inference about S can be made from the statement, “some P are M, no M are S.”
But a conclusion can be drawn: S does not contain the whole of P.
But a conclusion can be made: S does not include the entire P.
It is not that the result is given expressed in another[Pg 105] form. The mnemonic lines deny that any conclusion can be drawn from premisses in the moods I, E, respectively.
It’s not that the result is simply presented in a different[Pg 105] form. The mnemonic lines argue that no conclusions can be made from premises in the moods I, E, respectively.
Thus a simple four-dimensional poiograph has enabled us to detect a mistake in the mnemonic lines which have been handed down unchallenged from mediæval times. To discuss the subject of these lines more fully a logician defending them would probably say that a particular statement cannot be a major premiss; and so deny the existence of the fourth figure in the combination of moods.
Thus a simple four-dimensional poiograph has allowed us to spot a mistake in the mnemonic lines that have been passed down unchanged since medieval times. To explore the topic of these lines in more detail, a logician defending them would likely argue that a specific statement cannot be a major premise, thereby rejecting the existence of the fourth figure in the combination of moods.
To take our instance: some Americans are of African stock; no Aryans are of African stock. He would say that the conclusion is some Americans are not Aryans; and that the second statement is the major. He would refuse to say anything about Aryans, condemning us to an eternal silence about them, as far as these premisses are concerned! But, if there is a statement involving the relation of two classes, it must be expressible as a statement about either of them.
To use our example: some Americans have African ancestry; no Aryans have African ancestry. He would argue that the conclusion is that some Americans are not Aryans; and that the second statement is the major premise. He would refuse to say anything about Aryans, forcing us into a permanent silence about them, at least regarding these premises! However, if there’s a statement that involves the relationship between two groups, it has to be expressed as a statement about either one of them.
To bar the conclusion, “Aryans do not include the whole of Americans,” is purely a makeshift in favour of a false classification.
To prevent the conclusion that “Aryans do not include all Americans” is just a temporary fix for a misleading classification.
And the argument drawn from the universality of the major premiss cannot be consistently maintained. It would preclude such combinations as major O, minor A, conclusion O—i.e., such as some mountains (M) are not permanent (P); all mountains (M) are scenery (S); some scenery (S) is not permanent (P).
And the argument based on the universality of the major premise can't be consistently upheld. It would prevent combinations like major O, minor A, conclusion O—i.e. such as some mountains (M) are not permanent (P); all mountains (M) are scenery (S); some scenery (S) is not permanent (P).
This is allowed in “Jevon’s Logic,” and his omission to discuss I, E, O, in the fourth figure, is inexplicable. A satisfactory poiograph of the logical scheme can be made by admitting the use of the words some, none, or all, about the predicate as well as about the subject. Then we can express the statement, “Aryans do not include the whole of Americans,” clumsily, but, when its obscurity is fathomed, correctly, as “Some Aryans are not all[Pg 106] Americans.” And this method is what is called the “quantification of the predicate.”
This is allowed in “Jevon’s Logic,” and his failure to discuss I, E, O, in the fourth figure is puzzling. A clear representation of the logical scheme can be created by allowing the use of the words some, none, or all, regarding both the predicate and the subject. Then we can express the statement, “Aryans do not include the whole of Americans,” awkwardly, but once its ambiguity is understood, correctly as “Some Aryans are not all[Pg 106] Americans.” And this approach is what is known as the “quantification of the predicate.”
The laws of formal logic are coincident with the conclusions which can be drawn about regions of space, which overlap one another in the various possible ways. It is not difficult so to state the relations or to obtain a symmetrical poiograph. But to enter into this branch of geometry is beside our present purpose, which is to show the application of the poiograph in a finite and limited region, without any of those complexities which attend its use in regard to natural objects.
The rules of formal logic align with the conclusions that can be made about areas of space that overlap in different ways. It's not hard to outline the relationships or create a symmetrical poiograph. However, diving into this area of geometry isn't our current focus. We're here to demonstrate how to apply the poiograph in a finite and limited area, without any of the complexities that come into play when dealing with natural objects.
If we take the latter—plants, for instance—and, without assuming fixed directions in space as representative of definite variations, arrange the representative points in such a manner as to correspond to the similarities of the objects, we obtain configuration of singular interest; and perhaps in this way, in the making of shapes of shapes, bodies with bodies omitted, some insight into the structure of the species and genera might be obtained.
If we consider the latter—like plants, for example—and, instead of assuming fixed positions in space as signs of specific differences, organize the representative points in a way that reflects the similarities of the objects, we create a configuration of unique interest; and maybe through this process, by forming shapes of shapes and leaving out bodies, we could gain some understanding of the structure of the species and genera.
[Pg 107]
[Pg 107]
CHAPTER IX
APPLICATION TO KANT’S THEORY OF
EXPERIENCE
When we observe the heavenly bodies we become aware that they all participate in one universal motion—a diurnal revolution round the polar axis.
When we look at the heavenly bodies, we realize that they all move together in one universal motion—a daily rotation around the polar axis.
In the case of fixed stars this is most unqualifiedly true, but in the case of the sun, and the planets also, the single motion of revolution can be discerned, modified, and slightly altered by other and secondary motions.
In the case of fixed stars, this is definitely true, but for the sun and the planets, the single motion of revolution can be seen, changed, and slightly affected by other secondary motions.
Hence the universal characteristic of the celestial bodies is that they move in a diurnal circle.
Hence, the common trait of celestial bodies is that they move in a daily circle.
But we know that this one great fact which is true of them all has in reality nothing to do with them. The diurnal revolution which they visibly perform is the result of the condition of the observer. It is because the observer is on a rotating earth that a universal statement can be made about all the celestial bodies.
But we know that this one fundamental fact, which is true for all of them, really has nothing to do with them. The daily movement they visibly make is a result of the observer's position. It's because the observer is on a rotating Earth that a universal statement can be made about all the celestial bodies.
The universal statement which is valid about every one of the celestial bodies is that which does not concern them at all, and is but a statement of the condition of the observer.
The universal statement that applies to every celestial body is one that has nothing to do with them at all; it only reflects the state of the observer.
Now there are universal statements of other kinds which we can make. We can say that all objects of experience are in space and subject to the laws of geometry.
Now there are other kinds of universal statements we can make. We can say that all objects of experience exist in space and are subject to the laws of geometry.
[Pg 108]
[Pg 108]
Does this mean that space and all that it means is due to a condition of the observer?
Does this mean that space and everything it entails depends on the observer's condition?
If a universal law in one case means nothing affecting the objects themselves, but only a condition of observation, is this true in every case? There is shown us in astronomy a vera causa for the assertion of a universal. Is the same cause to be traced everywhere?
If a universal law in one instance means nothing about the objects themselves, but only relates to how we observe them, is this true in every case? Astronomy shows us a vera causa for the claim of a universal. Can we find the same cause everywhere?
Such is a first approximation to the doctrine of Kant’s critique.
Such is a first approximation to Kant's critique doctrine.
It is the apprehension of a relation into which, on the one side and the other, perfectly definite constituents enter—the human observer and the stars—and a transference of this relation to a region in which the constituents on either side are perfectly unknown.
It’s the understanding of a relationship that involves two clear elements—the human observer and the stars—and applying this relationship to an area where the elements on both sides are completely unknown.
If spatiality is due to a condition of the observer, the observer cannot be this bodily self of ours—the body, like the objects around it, are equally in space.
If spatiality depends on the observer's condition, then the observer can't just be this physical self of ours—the body, like the objects around it, exists equally in space.
This conception Kant applied, not only to the intuitions of sense, but to the concepts of reason—wherever a universal statement is made there is afforded him an opportunity for the application of his principle. He constructed a system in which one hardly knows which the most to admire, the architectonic skill, or the reticence with regard to things in themselves, and the observer in himself.
This idea Kant applied, not just to sensory intuitions, but also to concepts of reason—whenever a universal statement is made, it gives him a chance to apply his principle. He built a system where one can hardly tell what’s more admirable, the architectural skill or the restraint concerning things in themselves and the observer within.
His system can be compared to a garden, somewhat formal perhaps, but with the charm of a quality more than intellectual, a besonnenheit, an exquisite moderation over all. And from the ground he so carefully prepared with that buried in obscurity, which it is fitting should be obscure, science blossoms and the tree of real knowledge grows.
His system can be compared to a garden—maybe a bit formal, but it has a charm that goes beyond just being intellectual, a besonnenheit, a refined balance throughout. From the ground he meticulously prepared, which should rightfully remain obscure, science flourishes and the tree of genuine knowledge thrives.
The critique is a storehouse of ideas of profound interest. The one of which I have given a partial statement leads, as we shall see on studying it in detail, to a theory of mathematics suggestive of enquiries in many directions.
The critique is a treasure trove of fascinating ideas. The one that I've summarized gives rise, as we'll see when we examine it closely, to a theory of mathematics that opens the door to inquiries in many directions.
[Pg 109]
[Pg 109]
The justification for my treatment will be found amongst other passages in that part of the transcendental analytic, in which Kant speaks of objects of experience subject to the forms of sensibility, not subject to the concepts of reason.
The reason for my approach can be found in other sections of the transcendental analytic, where Kant discusses objects of experience that are influenced by the forms of sensibility, but not governed by the concepts of reason.
Kant asserts that whenever we think we think of objects in space and time, but he denies that the space and time exist as independent entities. He goes about to explain them, and their universality, not by assuming them, as most other philosophers do, but by postulating their absence. How then does it come to pass that the world is in space and time to us?
Kant argues that when we think, we think of objects in space and time, but he claims that space and time do not exist as separate entities. He explains their existence and universality not by taking them for granted like most other philosophers, but by suggesting that they are not independent. So, how do we perceive the world as being in space and time?
Kant takes the same position with regard to what we call nature—a great system subject to law and order. “How do you explain the law and order in nature?” we ask the philosophers. All except Kant reply by assuming law and order somewhere, and then showing how we can recognise it.
Kant holds the same view about what we refer to as nature—a vast system governed by law and order. “How do you explain the law and order in nature?” we ask philosophers. All of them, except Kant, start by assuming that there is law and order somewhere, then demonstrate how we can identify it.
In explaining our notions, philosophers from other than the Kantian standpoint, assume the notions as existing outside us, and then it is no difficult task to show how they come to us, either by inspiration or by observation.
In explaining our concepts, philosophers from perspectives other than Kant's assume that these concepts exist outside of us, and then it becomes easy to demonstrate how they reach us, either through inspiration or observation.
We ask “Why do we have an idea of law in nature?” “Because natural processes go according to law,” we are answered, “and experience inherited or acquired, gives us this notion.”
We ask, “Why do we have a concept of law in nature?” “Because natural processes follow certain laws,” we are told, “and our experiences, whether inherited or learned, give us this idea.”
But when we speak about the law in nature we are speaking about a notion of our own. So all that these expositors do is to explain our notion by an assumption of it.
But when we talk about the law in nature, we're discussing a concept of our own. So all these explainers are doing is clarifying our idea by making an assumption about it.
Kant is very different. He supposes nothing. An experience such as ours is very different from experience in the abstract. Imagine just simply experience, succession of states, of consciousness! Why, there would be no connecting any two together, there would be no[Pg 110] personal identity, no memory. It is out of a general experience such as this, which, in respect to anything we call real, is less than a dream, that Kant shows the genesis of an experience such as ours.
Kant is really different. He assumes nothing. An experience like ours is way different from experience in the abstract. Just think about simple experience, a sequence of states, of consciousness! There would be no way to connect any two of them together, no personal identity, no memory. It's from a general experience like this, which, in terms of anything we consider real, is less substantial than a dream, that Kant illustrates the origin of an experience like ours.
Kant takes up the problem of the explanation of space, time, order, and so quite logically does not presuppose them.
Kant addresses the issue of explaining space, time, order, and so on, and logically does not assume them.
But how, when every act of thought is of things in space, and time, and ordered, shall we represent to ourselves that perfectly indefinite somewhat which is Kant’s necessary hypothesis—that which is not in space or time and is not ordered. That is our problem, to represent that which Kant assumes not subject to any of our forms of thought, and then show some function which working on that makes it into a “nature” subject to law and order, in space and time. Such a function Kant calls the “Unity of Apperception”; i.e., that which makes our state of consciousness capable of being woven into a system with a self, an outer world, memory, law, cause, and order.
But how, when every thought relates to things in space and time and follows an order, can we grasp that totally vague idea which is Kant’s necessary assumption—that which isn't in space or time and isn't organized? That's our challenge: to understand what Kant claims exists beyond our usual ways of thinking, and then to demonstrate a process that transforms it into a “nature” that is subject to laws and order, in space and time. Kant refers to this process as the “Unity of Apperception”; i.e., the aspect that allows our state of consciousness to be integrated into a system with a self, an external world, memory, law, cause, and order.
The difficulty that meets us in discussing Kant’s hypothesis is that everything we think of is in space and time—how then shall we represent in space an existence not in space, and in time an existence not in time? This difficulty is still more evident when we come to construct a poiograph, for a poiograph is essentially a space structure. But because more evident the difficulty is nearer a solution. If we always think in space, i.e. using space concepts, the first condition requisite for adapting them to the representation of non-spatial existence, is to be aware of the limitation of our thought, and so be able to take the proper steps to overcome it. The problem before us, then, is to represent in space an existence not in space.
The challenge we face in discussing Kant’s hypothesis is that everything we think of exists in space and time—so how can we represent in space something that exists outside of it, and in time something that exists beyond time? This challenge becomes even clearer when we try to create a poiograph, since a poiograph is fundamentally a structure in space. However, the more obvious the difficulty is, the closer we are to finding a solution. If we always think in spatial terms, meaning we use spatial concepts, the first step we need to take to adapt them for representing non-spatial existence is to realize the limits of our thinking so that we can take the right actions to overcome them. The problem we have, then, is to represent in space something that isn’t in space.
The solution is an easy one. It is provided by the conception of alternativity.
The solution is a simple one. It's provided by the idea of alternativity.
[Pg 111]
[Pg 111]
To get our ideas clear let us go right back behind the distinctions of an inner and an outer world. Both of these, Kant says, are products. Let us take merely states of consciousness, and not ask the question whether they are produced or superinduced—to ask such a question is to have got too far on, to have assumed something of which we have not traced the origin. Of these states let us simply say that they occur. Let us now use the word a “posit” for a phase of consciousness reduced to its last possible stage of evanescence; let a posit be that phase of consciousness of which all that can be said is that it occurs.
To clarify our ideas, let's go all the way back before distinguishing between an inner and an outer world. Both of these, according to Kant, are products. Let's focus only on states of consciousness and not question whether they are created or influenced—asking that question gets us ahead of ourselves and assumes something whose origin we haven't traced. For these states, let's simply say that they happen. Now, let's use the term "posit" for a phase of consciousness reduced to its barest form of fading away; a posit is that phase of consciousness about which all we can say is that it occurs.
Let a, b, c, be three such posits. We cannot represent them in space without placing them in a certain order, as a, b, c. But Kant distinguishes between the forms of sensibility and the concepts of reason. A dream in which everything happens at haphazard would be an experience subject to the form of sensibility and only partially subject to the concepts of reason. It is partially subject to the concepts of reason because, although there is no order of sequence, still at any given time there is order. Perception of a thing as in space is a form of sensibility, the perception of an order is a concept of reason.
Let a, b, c be three such elements. We can't represent them in space without arranging them in a specific order, like a, b, c. However, Kant makes a distinction between the forms of sensibility and the concepts of reason. A dream where everything happens randomly would be an experience governed by the form of sensibility, but only partially governed by the concepts of reason. It's partially governed by the concepts of reason because, even though there’s no sequence, there's still an order at any given moment. Perceiving something as existing in space is a form of sensibility, while perceiving an order is a concept of reason.
We must, therefore, in order to get at that process which Kant supposes to be constitutive of an ordered experience imagine the posits as in space without order.
We need to, then, to understand that process that Kant assumes is essential for an organized experience, envision the posits as being in space without any order.
As we know them they must be in some order, abc, bca, cab, acb, cba, bac, one or another.
As we know them, they must be in some order: abc, bca, cab, acb, cba, bac, one or another.
To represent them as having no order conceive all these different orders as equally existing. Introduce the conception of alternativity—let us suppose that the order abc, and bac, for example, exist equally, so that we cannot say about a that it comes before or after b. This[Pg 112] would correspond to a sudden and arbitrary change of a into b and b into a, so that, to use Kant’s words, it would be possible to call one thing by one name at one time and at another time by another name.
To think of them as having no specific order, imagine all these different orders as existing equally. Introduce the idea of alternativity—let’s say that the order abc and bac, for instance, exist equally, meaning we can't claim that a comes before or after b. This[Pg 112] would be like a sudden and random switch of a into b and b into a, so that, to use Kant’s words, it would be possible to refer to one thing by one name at one moment and by another name at another moment.
In an experience of this kind we have a kind of chaos, in which no order exists; it is a manifold not subject to the concepts of reason.
In an experience like this, we have a kind of chaos where no order exists; it's a complex situation that doesn't fit into traditional reasoning.
Now is there any process by which order can be introduced into such a manifold—is there any function of consciousness in virtue of which an ordered experience could arise?
Now is there a way to bring order into such a chaotic situation—can consciousness play a role in creating an ordered experience?
In the precise condition in which the posits are, as described above, it does not seem to be possible. But if we imagine a duality to exist in the manifold, a function of consciousness can be easily discovered which will produce order out of no order.
In the exact state of the posits as described above, it doesn't seem possible. But if we imagine a duality in the manifold, we can easily find a function of consciousness that creates order from chaos.
Let us imagine each posit, then, as having, a dual aspect. Let a be 1a in which the dual aspect is represented by the combination of symbols. And similarly let b be 2b, c be 3c, in which 2 and b represent the dual aspects of b, 3 and c those of c.
Let’s think of each position as having two sides. Let a be 1a, where the two sides are shown through a mix of symbols. Similarly, let b be 2b and c be 3c, where 2 and b represent the two sides of b, and 3 and c represent those of c.
Since a can arbitrarily change into b, or into c, and so on, the particular combinations written above cannot be kept. We have to assume the equally possible occurrence of form such as 2a, 2b, and so on; and in order to get a representation of all those combinations out of which any set is alternatively possible, we must take every aspect with every aspect. We must, that is, have every letter with every number.
Since a can randomly transform into b, or into c, and so on, the specific combinations listed above can't be maintained. We need to assume the equally likely appearance of forms like 2a, 2b, and so forth; and to represent all those combinations from which any set could potentially arise, we must consider every aspect with every aspect. In other words, we need to have every letter with every number.
Let us now apply the method of space representation.
Let’s now use the space representation method.
Note.—At the beginning of the next chapter the same structures as those which follow are exhibited in more detail and a reference to them will remove any obscurity which may be found in the immediately following passages. They are there carried[Pg 113] on to a greater multiplicity of dimensions, and the significance of the process here briefly explained becomes more apparent.
Note.—At the start of the next chapter, the same structures discussed here will be shown in more detail, and referring to them will clarify any confusion you may find in the upcoming passages. They are expanded there into several more dimensions, and the importance of the process briefly explained here becomes clearer.
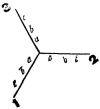
Take three mutually rectangular axes in space 1, 2, 3 (fig. 59), and on each mark three points, the common meeting point being the first on each axis. Then by means of these three points on each axis we define 27 positions, 27 points in a cubical cluster, shown in fig. 60, the same method of co-ordination being used as has been described before. Each of these positions can be named by means of the axes and the points combined.
Take three perpendicular axes in space 1, 2, 3 (fig. 59), and mark three points on each, with the common meeting point being the first point on each axis. Then, using these three points on each axis, we define 27 positions, 27 points in a cubic arrangement, shown in fig. 60, using the same coordination method described earlier. Each of these positions can be labeled by combining the axes and the points.

Thus, for instance, the one marked by an asterisk can be called 1c, 2b, 3c, because it is opposite to c on 1, to b on 2, to c on 3.
Thus, for example, the one marked with an asterisk can be referred to as 1c, 2b, 3c, since it is opposite c on 1, b on 2, and c on 3.
Let us now treat of the states of consciousness corresponding to these positions. Each point represents a composite of posits, and the manifold of consciousness corresponding to them is of a certain complexity.
Let’s now discuss the states of consciousness that relate to these positions. Each point represents a mixture of possibilities, and the variety of consciousness connected to them is quite complex.
Suppose now the constituents, the points on the axes, to interchange arbitrarily, any one to become any other, and also the axes 1, 2, and 3, to interchange amongst themselves, any one to become any other, and to be subject to no system or law, that is to say, that order does not exist, and that the points which run abc on each axis may run bac, and so on.
Suppose now that the elements, the points on the axes, can be switched around freely, so any one can become any other, and that the axes 1, 2, and 3 can also swap places with each other, with any one turning into any other, and are not governed by any specific system or rules. In other words, order does not exist, and the points that move abc on each axis may instead move bac, and so forth.
Then any one of the states of consciousness represented by the points in the cluster can become any other. We have a representation of a random consciousness of a certain degree of complexity.
Then any one of the states of consciousness represented by the points in the cluster can become any other. We have a representation of a random consciousness of a certain level of complexity.
[Pg 114]
[Pg 114]
Now let us examine carefully one particular case of arbitrary interchange of the points, a, b, c; as one such case, carefully considered, makes the whole clear.
Now let's take a close look at one specific instance of randomly switching the points, a, b, c; because examining one such case in detail clarifies everything.
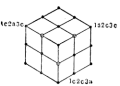
Consider the points named in the figure 1c, 2a, 3c; 1c, 2c, 3a; 1a, 2c, 3c, and examine the effect on them when a change of order takes place. Let us suppose, for instance, that a changes into b, and let us call the two sets of points we get, the one before and the one after, their change conjugates.
Consider the points labeled in figure 1c, 2a, 3c; 1c, 2c, 3a; 1a, 2c, 3c, and look at the impact on them when the order changes. For example, let's say a changes to b, and we'll refer to the two sets of points that we get, the one before and the one after, as their conjugates.
| Before the change | 1c 2a 3c | 1c 2c 3a | 1a 2c 3c | } Conjugates. |
| After the change | 1c 2b 3c | 1c 2c 3b | 1b 2c 3c |
The points surrounded by rings represent the conjugate points.
The points surrounded by rings represent the conjugate points.
It is evident that as consciousness, represented first by the first set of points and afterwards by the second set of points, would have nothing in common in its two phases. It would not be capable of giving an account of itself. There would be no identity.
It is clear that consciousness, illustrated first by the first set of points and then by the second set of points, would have nothing in common between its two phases. It wouldn’t be able to explain itself. There would be no identity.
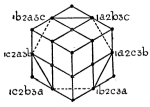
If, however, we can find any set of points in the cubical cluster, which, when any arbitrary change takes place in the points on the axes, or in the axes themselves, repeats itself, is reproduced, then a consciousness represented by those points would have a permanence. It would have a principle of identity. Despite the no law, the no order, of the ultimate constituents, it would have an order, it would form a system, the condition of a personal identity would be fulfilled.
If we can find any group of points in the cubic cluster that repeats or reproduces itself when there are any arbitrary changes to the points on the axes or the axes themselves, then the consciousness represented by those points would have permanence. It would have a principle of identity. Despite the lack of law or order among the ultimate components, it would still have order and create a system, fulfilling the condition for personal identity.
The question comes to this, then. Can we find a system of points which is self-conjugate which is such that when any posit on the axes becomes any other, or[Pg 115] when any axis becomes any other, such a set is transformed into itself, its identity is not submerged, but rises superior to the chaos of its constituents?
The question boils down to this: Can we find a system of points that is self-conjugate so that when any position on the axes changes to another, or when any axis changes to a different one, this set is transformed into itself, maintaining its identity and emerging stronger than the chaos of its components?
Such a set can be found. Consider the set represented in fig. 62, and written down in the first of the two lines—
Such a set can be found. Consider the set represented in fig. 62, and written down in the first of the two lines—
| Self- conjugate |
{ | 1a 2b 3c | 1b 2a 3c | 1c 2a 3b | 1c 2b 3a | 1b 2c 3a | 1a 2c 3b |
| 1c 2b 3a | 1b 2c 3a | 1a 2c 3b | 1a 2b 3c | 1b 2a 3c | 1c 2a 3b |
If now a change into c and c into a, we get the set in the second line, which has the same members as are in the upper line. Looking at the diagram we see that it would correspond simply to the turning of the figures as a whole.[2] Any arbitrary change of the points on the axes, or of the axes themselves, reproduces the same set.
If a changes into c and c changes into a, we get the set in the second line, which has the same members as those in the upper line. Looking at the diagram, we see that it would simply correspond to rotating the figures as a whole.[2] Any random change of the points on the axes, or of the axes themselves, reproduces the same set.
Thus, a function, by which a random, an unordered, consciousness could give an ordered and systematic one, can be represented. It is noteworthy that it is a system of selection. If out of all the alternative forms that only is attended to which is self-conjugate, an ordered consciousness is formed. A selection gives a feature of permanence.
Thus, a function by which a random, unordered consciousness could produce an ordered and systematic one can be represented. It's important to note that this is a selection system. If only the self-conjugate alternative forms are considered, an ordered consciousness is created. This selection introduces a sense of permanence.
Can we say that the permanent consciousness is this selection?
Can we say that permanent consciousness is this choice?
An analogy between Kant and Darwin comes into light. That which is swings clear of the fleeting, in virtue of its presenting a feature of permanence. There is no need to suppose any function of “attending to.” A consciousness capable of giving an account of itself is one which is characterised by this combination. All combinations exist—of this kind is the consciousness which can give an account of itself. And the very duality which[Pg 116] we have presupposed may be regarded as originated by a process of selection.
An analogy between Kant and Darwin becomes clear. What is stable avoids the temporary by showing a characteristic of permanence. There's no need to assume any role of “attending to.” A consciousness that can reflect on itself is defined by this combination. All combinations exist—this is the type of consciousness that can give an account of itself. And the very duality we have assumed can be seen as arising from a process of selection.[Pg 116]
Darwin set himself to explain the origin of the fauna and flora of the world. He denied specific tendencies. He assumed an indefinite variability—that is, chance—but a chance confined within narrow limits as regards the magnitude of any consecutive variations. He showed that organisms possessing features of permanence, if they occurred would be preserved. So his account of any structure or organised being was that it possessed features of permanence.
Darwin aimed to explain how the world's animals and plants came to be. He rejected the idea of specific trends. Instead, he proposed an indefinite variability, meaning change was primarily random, but still happens within narrow limits concerning the size of any successive changes. He demonstrated that organisms with stable characteristics would survive if they appeared. Therefore, his explanation of any structure or living thing was that it had stable characteristics.
Kant, undertaking not the explanation of any particular phenomena but of that which we call nature as a whole, had an origin of species of his own, an account of the flora and fauna of consciousness. He denied any specific tendency of the elements of consciousness, but taking our own consciousness, pointed out that in which it resembled any consciousness which could survive, which could give an account of itself.
Kant, not focusing on the explanation of any specific phenomena but rather on what we refer to as nature as a whole, had his own origin of species—an explanation of the flora and fauna of consciousness. He rejected any particular tendency of the elements of consciousness but, considering our own consciousness, highlighted the aspects in which it resembled any consciousness capable of surviving and giving an account of itself.
He assumes a chance or random world, and as great and small were not to him any given notions of which he could make use, he did not limit the chance, the randomness, in any way. But any consciousness which is permanent must possess certain features—those attributes namely which give it permanence. Any consciousness like our own is simply a consciousness which possesses those attributes. The main thing is that which he calls the unity of apperception, which we have seen above is simply the statement that a particular set of phases of consciousness on the basis of complete randomness will be self-conjugate, and so permanent.
He accepts a world of chance and randomness, and since big and small concepts were not something he could utilize, he didn’t limit chance or randomness in any way. However, any consciousness that is enduring must have certain qualities—these characteristics that provide it with permanence. Any consciousness like ours simply has those qualities. The key idea is what he refers to as the unity of apperception, which we've discussed earlier as simply stating that a specific set of consciousness phases, based on complete randomness, will be self-conjugate and therefore enduring.
As with Darwin so with Kant, the reason for existence of any feature comes to this—show that it tends to the permanence of that which possesses it.
As with Darwin, so with Kant, the reason for the existence of any feature comes down to this—demonstrate that it contributes to the permanence of what possesses it.
We can thus regard Kant as the creator of the first of[Pg 117] the modern evolution theories. And, as is so often the case, the first effort was the most stupendous in its scope. Kant does not investigate the origin of any special part of the world, such as its organisms, its chemical elements, its social communities of men. He simply investigates the origin of the whole—of all that is included in consciousness, the origin of that “thought thing” whose progressive realisation is the knowable universe.
We can see Kant as the creator of the first of[Pg 117] the modern evolution theories. And, as is often the case, the first effort was the most impressive in its scope. Kant doesn’t look into the origin of any specific part of the world, like its organisms, its chemical elements, or its social groups of people. He simply explores the origin of the whole—everything included in consciousness, the origin of that “thought thing” whose ongoing realization is the knowable universe.
This point of view is very different from the ordinary one, in which a man is supposed to be placed in a world like that which he has come to think of it, and then to learn what he has found out from this model which he himself has placed on the scene.
This perspective is quite different from the typical one, where a person is thought to exist in a world like the one he envisions, and then learns from the example he has created for himself.
We all know that there are a number of questions in attempting an answer to which such an assumption is not allowable.
We all know that there are several questions where making such an assumption isn't acceptable.
Mill, for instance, explains our notion of “law” by an invariable sequence in nature. But what we call nature is something given in thought. So he explains a thought of law and order by a thought of an invariable sequence. He leaves the problem where he found it.
Mill, for example, explains our concept of “law” as a constant sequence in nature. But what we refer to as nature is something that exists in thought. So he describes the idea of law and order using the idea of a constant sequence. He doesn’t really solve the problem; he just leaves it as he found it.
Kant’s theory is not unique and alone. It is one of a number of evolution theories. A notion of its import and significance can be obtained by a comparison of it with other theories.
Kant’s theory isn’t unique or standalone. It’s part of a range of evolution theories. We can grasp its importance and significance by comparing it to other theories.
Thus in Darwin’s theoretical world of natural selection a certain assumption is made, the assumption of indefinite variability—slight variability it is true, over any appreciable lapse of time, but indefinite in the postulated epochs of transformation—and a whole chain of results is shown to follow.
Thus in Darwin’s theoretical world of natural selection, there's an assumption made: the assumption of unlimited variability—slight variability, it's true, over any significant stretch of time, but unlimited in the suggested periods of change—and a whole series of results is shown to follow.
This element of chance variation is not, however, an ultimate resting place. It is a preliminary stage. This supposing the all is a preliminary step towards finding out what is. If every kind of organism can come into[Pg 118] being, those that do survive will present such and such characteristics. This is the necessary beginning for ascertaining what kinds of organisms do come into existence. And so Kant’s hypothesis of a random consciousness is the necessary beginning for the rational investigation of consciousness as it is. His assumption supplies, as it were, the space in which we can observe the phenomena. It gives the general laws constitutive of any experience. If, on the assumption of absolute randomness in the constituents, such and such would be characteristic of the experience, then, whatever the constituents, these characteristics must be universally valid.
This element of chance variation is not an ultimate conclusion. It's just an initial stage. This idea suggests that everything is just a step toward discovering what actually exists. If every type of organism can come into existence, those that survive will show certain characteristics. This is the essential starting point for determining what kinds of organisms actually appear. Thus, Kant's idea of a random consciousness is the necessary starting point for the logical exploration of consciousness as it truly is. His assumption creates the space where we can observe the phenomena. It establishes the general rules that shape any experience. If, assuming absolute randomness in the components, certain traits would be typical of the experience, then, regardless of the components, these traits must hold true universally.
We will now proceed to examine more carefully the poiograph, constructed for the purpose of exhibiting an illustration of Kant’s unity of apperception.
We will now take a closer look at the poiograph, designed to serve as an illustration of Kant’s unity of apperception.
In order to show the derivation order out of non-order it has been necessary to assume a principle of duality—we have had the axes and the posits on the axes—there are two sets of elements, each non-ordered, and it is in the reciprocal relation of them that the order, the definite system, originates.
In order to demonstrate how order arises from non-order, it has been necessary to assume a principle of duality—we have the axes and the positions on the axes—there are two sets of elements, each without a specific order, and it is in their reciprocal relationship that order, the defined system, emerges.
Is there anything in our experience of the nature of a duality?
Is there anything in our experience that reflects the nature of duality?
There certainly are objects in our experience which have order and those which are incapable of order. The two roots of a quadratic equation have no order. No one can tell which comes first. If a body rises vertically and then goes at right angles to its former course, no one can assign any priority to the direction of the north or to the east. There is no priority in directions of turning. We associate turnings with no order progressions in a line with order. But in the axes and points we have assumed above there is no such distinction. It is the same, whether we assume an order among the turnings, and no order among the points on the axes, or, vice versa, an order in[Pg 119] the points and no order in the turnings. A being with an infinite number of axes mutually at right angles, with a definite sequence between them and no sequence between the points on the axes, would be in a condition formally indistinguishable from that of a creature who, according to an assumption more natural to us, had on each axis an infinite number of ordered points and no order of priority amongst the axes. A being in such a constituted world would not be able to tell which was turning and which was length along an axis, in order to distinguish between them. Thus to take a pertinent illustration, we may be in a world of an infinite number of dimensions, with three arbitrary points on each—three points whose order is indifferent, or in a world of three axes of arbitrary sequence with an infinite number of ordered points on each. We can’t tell which is which, to distinguish it from the other.
There are definitely objects in our experience that have order and others that don’t. The two roots of a quadratic equation have no order; no one can say which comes first. If an object moves straight up and then changes direction to go sideways, no one can determine whether north or east is more important. There’s no priority in turning directions. We link turning movements with disorder and linear progressions with order. However, in the axes and points we've talked about, there's no such difference. It doesn't matter if we assume an order among the turns and no order among the points on the axes, or vice versa—an order in the points and no order in the turns. A being with an infinite number of axes that are all at right angles to each other, having a specific sequence between them but no sequence among the points on the axes, would be in a situation that looks the same as a creature who, based on an assumption that seems more natural to us, has an infinite number of ordered points on each axis and no order of priority among the axes. A being in this kind of world wouldn’t be able to differentiate between turning and length along an axis. For example, we could be in a world with an infinite number of dimensions, each having three arbitrary points—three points where the order doesn’t matter—or in a world with three axes in any sequence, each containing an infinite number of ordered points. We wouldn’t be able to tell which is which to distinguish them from one another.
Thus it appears the mode of illustration which we have used is not an artificial one. There really exists in nature a duality of the kind which is necessary to explain the origin of order out of no order—the duality, namely, of dimension and position. Let us use the term group for that system of points which remains unchanged, whatever arbitrary change of its constituents takes place. We notice that a group involves a duality, is inconceivable without a duality.
Thus it seems that the way we've illustrated this isn't artificial. There is actually a duality in nature that's needed to explain how order comes from chaos—the duality of dimension and position, specifically. Let's refer to a "group" as the system of points that stays the same, no matter how its individual parts change. We can see that a group involves a duality; it can't even be imagined without it.
Thus, according to Kant, the primary element of experience is the group, and the theory of groups would be the most fundamental branch of science. Owing to an expression in the critique the authority of Kant is sometimes adduced against the assumption of more than three dimensions to space. It seems to me, however, that the whole tendency of his theory lies in the opposite direction, and points to a perfect duality between dimension and position in a dimension.
Thus, according to Kant, the main component of experience is the group, and the theory of groups would be the most essential branch of science. Due to a statement in his critique, Kant's authority is sometimes used to argue against the idea of more than three dimensions in space. However, it seems to me that the overall direction of his theory suggests the opposite, highlighting a clear duality between dimension and position within a dimension.
[Pg 120]
[Pg 120]
If the order and the law we see is due to the conditions of conscious experience, we must conceive nature as spontaneous, free, subject to no predication that we can devise, but, however apprehended, subject to our logic.
If the order and the law we observe are a result of conscious experience, we need to think of nature as spontaneous and free, not bound by any definitions we can come up with, but, however we understand it, still subject to our logic.
And our logic is simply spatiality in the general sense—that resultant of a selection of the permanent from the unpermanent, the ordered from the unordered, by the means of the group and its underlying duality.
And our logic is simply about how we understand space in a general way—that is, the outcome of choosing what is permanent from what is temporary, the organized from the disorganized, through the group and its underlying dual nature.
We can predicate nothing about nature, only about the way in which we can apprehend nature. All that we can say is that all that which experience gives us will be conditioned as spatial, subject to our logic. Thus, in exploring the facts of geometry from the simplest logical relations to the properties of space of any number of dimensions, we are merely observing ourselves, becoming aware of the conditions under which we must perceive. Do any phenomena present themselves incapable of explanation under the assumption of the space we are dealing with, then we must habituate ourselves to the conception of a higher space, in order that our logic may be equal to the task before us.
We can't make any claims about nature itself, only about how we can understand it. All we can say is that everything our experience provides us will be influenced by spatial conditions and our logic. So, when we look at geometric facts—starting from basic logical relationships to the properties of space in any number of dimensions—we're really just observing ourselves and becoming aware of the conditions under which we have to perceive. If any phenomena show up that can’t be explained by the type of space we’re considering, then we need to adapt our thinking to account for a higher dimension of space, so that our logic can handle the challenge we face.
We gain a repetition of the thought that came before, experimentally suggested. If the laws of the intellectual comprehension of nature are those derived from considering her as absolute chance, subject to no law save that derived from a process of selection, then, perhaps, the order of nature requires different faculties from the intellectual to apprehend it. The source and origin of ideas may have to be sought elsewhere than in reasoning.
We get a repeat of the earlier thought, suggested through experience. If the rules for understanding nature come from viewing it as pure chance, following no law except one formed by a selection process, then maybe understanding the order of nature needs different skills than just intellectual reasoning. The source of ideas might need to be found beyond logic.
The total outcome of the critique is to leave the ordinary man just where he is, justified in his practical attitude towards nature, liberated from the fetters of his own mental representations.
The overall result of the critique is to keep the everyday person exactly where they are, validated in their practical approach to nature, and freed from the constraints of their own mental images.
The truth of a picture lies in its total effect. It is vain to seek information about the landscape from an examina[Pg 121]tion of the pigments. And in any method of thought it is the complexity of the whole that brings us to a knowledge of nature. Dimensions are artificial enough, but in the multiplicity of them we catch some breath of nature.
The truth of a picture lies in its overall impact. It's pointless to try to learn about the landscape by analyzing the colors. In any way of thinking, it's the complexity of the whole that leads us to understand nature. Dimensions are artificial enough, but within their variety, we catch a hint of nature.
We must therefore, and this seems to me the practical conclusion of the whole matter, proceed to form means of intellectual apprehension of a greater and greater degree of complexity, both dimensionally and in extent in any dimension. Such means of representation must always be artificial, but in the multiplicity of the elements with which we deal, however incipiently arbitrary, lies our chance of apprehending nature.
We need to, and this feels like the practical conclusion of everything, create ways to understand more complex ideas, both in terms of depth and breadth in any dimension. These ways of representing things will always be artificial, but in the variety of elements we work with, no matter how somewhat arbitrary, is our opportunity to grasp nature.
And as a concluding chapter to this part of the book, I will extend the figures, which have been used to represent Kant’s theory, two steps, so that the reader may have the opportunity of looking at a four-dimensional figure which can be delineated without any of the special apparatus, to the consideration of which I shall subsequently pass on.
And as a final chapter to this section of the book, I will expand the figures that represent Kant’s theory by two steps, so that the reader can see a four-dimensional figure that can be illustrated without any special equipment, which I will discuss next.
[Pg 122]
[Pg 122]
CHAPTER X
A FOUR-DIMENSIONAL FIGURE
The method used in the preceding chapter to illustrate the problem of Kant’s critique, gives a singularly easy and direct mode of constructing a series of important figures in any number of dimensions.
The method used in the previous chapter to explain Kant’s critique provides a uniquely simple and straightforward way to create a series of important figures in any number of dimensions.
We have seen that to represent our space a plane being must give up one of his axes, and similarly to represent the higher shapes we must give up one amongst our three axes.
We have seen that to represent our space, a being in two dimensions must give up one of its axes, and similarly, to represent higher shapes, we must give up one of our three axes.
But there is another kind of giving up which reduces the construction of higher shapes to a matter of the utmost simplicity.
But there's another kind of giving up that simplifies building higher forms to something incredibly straightforward.
Ordinarily we have on a straight line any number of positions. The wealth of space in position is illimitable, while there are only three dimensions.
Ordinarily, we have any number of positions along a straight line. The amount of available space in these positions is limitless, even though there are only three dimensions.
I propose to give up this wealth of positions, and to consider the figures obtained by taking just as many positions as dimensions.
I suggest we let go of this abundance of positions and look at the figures we get by taking the same number of positions as there are dimensions.
In this way I consider dimensions and positions as two “kinds,” and applying the simple rule of selecting every one of one kind with every other of every other kind, get a series of figures which are noteworthy because they exactly fill space of any number of dimensions (as the hexagon fills a plane) by equal repetitions of themselves.
In this way, I view dimensions and positions as two “types,” and by using the straightforward rule of pairing each one from one type with every one from the other types, I create a series of figures that are interesting because they perfectly fill space of any number of dimensions (like how a hexagon fills a plane) through equal repetitions of themselves.
[Pg 123]
[Pg 123]
The rule will be made more evident by a simple application.
The rule will be made clearer through a simple application.
Let us consider one dimension and one position. I will call the axis i, and the position o.
Let’s look at one dimension and one position. I’ll call the axis i, and the position o.
———————————————-i
o
i
o
Here the figure is the position o on the line i. Take now two dimensions and two positions on each.
Here the figure is the position o on the line i. Now consider two dimensions and two positions on each.

We have the two positions o; 1 on i, and the two positions o, 1 on j, fig. 63. These give rise to a certain complexity. I will let the two lines i and j meet in the position I call o on each, and I will consider i as a direction starting equally from every position on j, and j as starting equally from every position on i. We thus obtain the following figure:—A is both oi and oj, B is 1i and oj, and so on as shown in fig. 63b. The positions on AC are all oi positions. They are, if we like to consider it in that way, points at no distance in the i direction from the line AC. We can call the line AC the oi line. Similarly the points on AB are those no distance from AB in the j direction, and we can call them oj points and the line AB the oj line. Again, the line CD can be called the 1j line because the points on it are at a distance, 1 in the j direction.
We have two positions o; 1 on i, and two positions o, 1 on j, fig. 63. This creates a certain complexity. I'll let the two lines i and j intersect at the position I call o on each line, and I’ll consider i as a direction starting equally from every position on j, and j as starting equally from every position on i. This leads us to the following figure:—A is both oi and oj, B is 1i and oj, and so on as shown in fig. 63b. The positions on AC are all oi positions. They are, if we want to think of it this way, points that are not at any distance in the i direction from the line AC. We can refer to the line AC as the oi line. Similarly, the points on AB are those that are at no distance from AB in the j direction, and we can call them oj points and the line AB the oj line. Again, the line Compact Disc can be referred to as the 1j line because the points on it are at a distance of 1 in the j direction.

We have then four positions or points named as shown, and, considering directions and positions as “kinds,” we have the combination of two kinds with two kinds. Now, selecting every one of one kind with every other of every other kind will mean that we take 1 of the kind i and[Pg 124] with it o of the kind j; and then, that we take o of the kind i and with it 1 of the kind j.
We now have four positions or points as indicated, and if we think of directions and positions as “types,” we have a combination of two types with two types. So, if we select one from one type with every option from the other type, we will take one from type i along with one from type j; and then, we will take one from type j along with one from type i.[Pg 124]
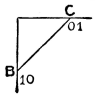
Thus we get a pair of positions lying in the straight line BC, fig. 64. We can call this pair 10 and 01 if we adopt the plan of mentally, adding an i to the first and a j to the second of the symbols written thus—01 is a short expression for Oi, 1j.
Thus we have a pair of positions lying on the straight line BC, fig. 64. We can call this pair 10 and 01 if we decide to mentally add an i to the first and a j to the second of the symbols written this way—01 is a shorthand for Oi, 1j.

Coming now to our space, we have three dimensions, so we take three positions on each. These positions I will suppose to be at equal distances along each axis. The three axes and the three positions on each are shown in the accompanying diagrams, fig. 65, of which the first represents a cube with the front faces visible, the second the rear faces of the same cube; the positions I will call 0, 1, 2; the axes, i, j, k. I take the base ABC as the starting place, from which to determine distances in the k direction, and hence every point in the base ABC will be an ok position, and the base ABC can be called an ok plane.
Now, moving to our space, we have three dimensions, so we take three positions for each. I’ll assume these positions are spaced equally along each axis. The three axes and the three positions for each are illustrated in the diagrams, fig. 65, with the first showing a cube with the front faces visible, and the second showing the rear faces of the same cube; I’ll label the positions as 0, 1, 2; and the axes as i, j, k. I’m using the base ABC as the reference point to determine distances in the k direction, so every point in the base ABC will be an ok position, and the base ABC can be referred to as an ok plane.
In the same way, measuring the distances from the face ADC, we see that every position in the face ADC is an oi position, and the whole plane of the face may be called an oi plane. Thus we see that with the introduction of a[Pg 125] new dimension the signification of a compound symbol, such as “oi,” alters. In the plane it meant the line AC. In space it means the whole plane ACD.
In the same way, measuring the distances from the face ADC, we see that every position in the face ADC is an oi position, and the entire plane of the face can be referred to as an oi plane. Thus, we notice that with the introduction of a [Pg 125] new dimension, the meaning of a compound symbol, like “oi,” changes. In the plane, it represented the line AC. In space, it refers to the whole plane ACD.
Now, it is evident that we have twenty-seven positions, each of them named. If the reader will follow this nomenclature in respect of the positions marked in the figures he will have no difficulty in assigning names to each one of the twenty-seven positions. A is oi, oj, ok. It is at the distance 0 along i, 0 along j, 0 along k, and io can be written in short 000, where the ijk symbols are omitted.
Now, it’s clear that we have twenty-seven positions, each with a specific name. If the reader follows this naming system related to the positions marked in the figures, they will have no trouble identifying each of the twenty-seven positions. A is oi, oj, ok. It is at a distance of 0 along i, 0 along j, and 0 along k, and io can be briefly written as 000, where the ijk symbols are left out.
The point immediately above is 001, for it is no distance in the i direction, and a distance of 1 in the k direction. Again, looking at B, it is at a distance of 2 from A, or from the plane ADC, in the i direction, 0 in the j direction from the plane ABD, and 0 in the k direction, measured from the plane ABC. Hence it is 200 written for 2i, 0j, 0k.
The point directly above is 001, since there's no distance in the i direction and a distance of 1 in the k direction. Looking at B, it's 2 units away from A, or from the plane ADC, in the i direction, 0 in the j direction from the plane ABD, and 0 in the k direction from the plane ABC. So, it is written as 200 for 2i, 0j, 0k.
Now, out of these twenty-seven “things” or compounds of position and dimension, select those which are given by the rule, every one of one kind with every other of every other kind.
Now, from these twenty-seven "things" or combinations of position and dimension, pick those that are specified by the rule, with each one of one type paired with every other type.

Take 2 of the i kind. With this we must have a 1 of the j kind, and then by the rule we can only have a 0 of the k kind, for if we had any other of the k kind we should repeat one of the kinds we already had. In 2i, 1j, 1k, for instance, 1 is repeated. The point we obtain is that marked 210, fig. 66.
Take 2 of the i type. With this, we must have 1 of the j type, and according to the rule, we can only have 0 of the k type, because if we had any other of the k type, we would end up repeating one of the types we already had. In 2i, 1j, 1k, for example, 1 is repeated. The point we get is the one marked 210, fig. 66.

Proceeding in this way, we pick out the following cluster of points, fig. 67. They are joined by lines, dotted where they are hidden by the body of the cube, and we see that they form a figure—a hexagon which[Pg 126] could be taken out of the cube and placed on a plane. It is a figure which will fill a plane by equal repetitions of itself. The plane being representing this construction in his plane would take three squares to represent the cube. Let us suppose that he takes the ij axes in his space and k represents the axis running out of his space, fig. 68. In each of the three squares shown here as drawn separately he could select the points given by the rule, and he would then have to try to discover the figure determined by the three lines drawn. The line from 210 to 120 is given in the figure, but the line from 201 to 102 or GK is not given. He can determine GK by making another set of drawings and discovering in them what the relation between these two extremities is.
By following this approach, we identify the following group of points, fig. 67. They are connected by lines, dotted where they are hidden by the cube's body, and we see that they create a shape—a hexagon—which[Pg 126] could be extracted from the cube and placed on a flat surface. This shape will fill a plane through repeated copies of itself. To represent this construction on his plane, he would need three squares to depict the cube. Let’s assume he uses the ij axes in his space and k indicates the axis extending out of his space, fig. 68. In each of the three squares depicted here individually, he can choose the points defined by the rule and then try to determine the shape defined by the three drawn lines. The line from 210 to 120 is shown in the figure, but the line from 201 to 102 or GK is not illustrated. He can figure out GK by creating another set of drawings and exploring the relationship between these two endpoints.

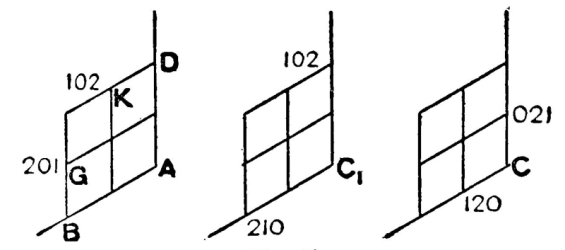
Let him draw the i and k axes in his plane, fig. 69. The j axis then runs out and he has the accompanying figure. In the first of these three squares, fig. 69, he can[Pg 127] pick out by the rule the two points 201, 102—G, and K. Here they occur in one plane and he can measure the distance between them. In his first representation they occur at G and K in separate figures.
Let him draw the i and k axes on his plane, fig. 69. The j axis then extends out, and he has the accompanying figure. In the first of these three squares, fig. 69, he can[Pg 127] identify the two points 201, 102—G and K—using the rule. Here they are in the same plane, and he can measure the distance between them. In his first representation, they are shown at G and K in separate figures.
Thus the plane being would find that the ends of each of the lines was distant by the diagonal of a unit square from the corresponding end of the last and he could then place the three lines in their right relative position. Joining them he would have the figure of a hexagon.
Thus the plane being would find that the ends of each of the lines were spaced apart by the diagonal of a unit square from the corresponding end of the last, allowing him to place the three lines in their correct relative position. By connecting them, he would create the shape of a hexagon.

We may also notice that the plane being could make a representation of the whole cube simultaneously. The three squares, shown in perspective in fig. 70, all lie in one plane, and on these the plane being could pick out any selection of points just as well as on three separate squares. He would obtain a hexagon by joining the points marked. This hexagon, as drawn, is of the right shape, but it would not be so if actual squares were used instead of perspective, because the relation between the separate squares as they lie in the plane figure is not their real relation. The figure, however, as thus constructed, would give him an idea of the correct figure, and he could determine it accurately by remembering that distances in each square were correct, but in passing from one square to another their distance in the third dimension had to be taken into account.
We can also observe that the plane could represent the entire cube at once. The three squares, shown in perspective in fig. 70, all exist in one plane, and on these, the plane could highlight any selection of points just as easily as on three separate squares. He would create a hexagon by connecting the marked points. This hexagon, as illustrated, is the correct shape, but it wouldn’t be the same if actual squares were used instead of perspective, because the relationship between the separate squares in the plane figure doesn’t reflect their true relationship. However, the figure constructed like this would give him an idea of the correct figure, and he could determine it accurately by recalling that distances in each square were correct, but when moving from one square to another, their distance in the third dimension needed to be considered.
Coming now to the figure made by selecting according to our rule from the whole mass of points given by four axes and four positions in each, we must first draw a catalogue figure in which the whole assemblage is shown.
Coming now to the figure created by selecting according to our guideline from the entire set of points provided by four axes and four positions in each, we must first draw a catalog figure that displays the entire collection.
We can represent this assemblage of points by four solid figures. The first giving all those positions which[Pg 128] are at a distance O from our space in the fourth dimension, the second showing all those that are at a distance 1, and so on.
We can represent this collection of points with four solid shapes. The first one shows all the positions that are a distance O from our space in the fourth dimension, the second one indicates all those that are at a distance of 1, and so on. [Pg 128]
These figures will each be cubes. The first two are drawn showing the front faces, the second two the rear faces. We will mark the points 0, 1, 2, 3, putting points at those distances along each of these axes, and suppose all the points thus determined to be contained in solid models of which our drawings in fig. 71 are representatives. Here we notice that as on the plane 0i meant the whole line from which the distances in the i direction was measured, and as in space 0i means the whole plane from which distances in the i direction are measured, so now 0h means the whole space in which the first cube stands—measuring away from that space by a distance of one we come to the second cube represented.
These shapes will all be cubes. The first two are shown with the front faces visible, while the next two show the back faces. We'll label points 0, 1, 2, 3, placing points at those distances along each of these axes, and assume all the points determined this way are part of solid models that our drawings in fig. 71 represent. Here we see that just as on the plane 0i refers to the entire line from which the distances in the i direction are measured, and as in space 0i refers to the entire plane from which distances in the i direction are measured, now 0h refers to the entire space where the first cube is located—measuring one unit away from that space, we arrive at the second cube that's represented.

[Pg 129]
[Pg 129]
Now selecting according to the rule every one of one kind with every other of every other kind, we must take, for instance, 3i, 2j, 1k, 0h. This point is marked 3210 at the lower star in the figure. It is 3 in the i direction, 2 in the j direction, 1 in the k direction, 0 in the h direction.
Now, following the guideline of pairing every element of one type with every element of another type, let’s take, for example, 3i, 2j, 1k, and 0h. This point is indicated as 3210 at the lower star in the figure. It is 3 units in the i direction, 2 units in the j direction, 1 unit in the k direction, and 0 units in the h direction.
With 3i we must also take 1j, 2k, 0h. This point is shown by the second star in the cube 0h.
With 3i, we also need to take 1j, 2k, and 0h. This point is indicated by the second star in the cube 0h.

In the first cube, since all the points are 0h points, we can only have varieties in which i, j, k, are accompanied by 3, 2, 1.
In the first cube, since all the points are 0h points, we can only have variations where i, j, and k are accompanied by 3, 2, and 1.
The points determined are marked off in the diagram fig. 72, and lines are drawn joining the adjacent pairs in each figure, the lines being dotted when they pass within the substance of the cube in the first two diagrams.
The points identified are shown in the diagram fig. 72, and lines are drawn connecting the adjacent pairs in each figure. The lines are dotted when they cut through the cube’s substance in the first two diagrams.
Opposite each point, on one side or the other of each[Pg 130] cube, is written its name. It will be noticed that the figures are symmetrical right and left; and right and left the first two numbers are simply interchanged.
Opposite each point, on one side or the other of each[Pg 130] cube, is the name written. You'll notice that the figures are symmetrical on both sides; and on both sides, the first two numbers are simply swapped.
Now this being our selection of points, what figure do they make when all are put together in their proper relative positions?
Now that we have this selection of points, what shape do they create when all are arranged in their correct relative positions?
To determine this we must find the distance between corresponding corners of the separate hexagons.
To figure this out, we need to find the distance between the corresponding corners of the separate hexagons.

To do this let us keep the axes i, j, in our space, and draw h instead of k, letting k run out in the fourth dimension, fig. 73.
To do this, let's keep the axes i and j in our space, and draw h instead of k, allowing k to extend into the fourth dimension, fig. 73.

Here we have four cubes again, in the first of which all the points are 0k points; that is, points at a distance zero in the k direction from the space of the three dimensions ijh. We have all the points selected before, and some of the distances, which in the last diagram led from figure to figure are shown here in the same figure, and so capable[Pg 131] of measurement. Take for instance the points 3120 to 3021, which in the first diagram (fig. 72) lie in the first and second figures. Their actual relation is shown in fig. 73 in the cube marked 2K, where the points in question are marked with a *. We see that the distance in question is the diagonal of a unit square. In like manner we find that the distance between corresponding points of any two hexagonal figures is the diagonal of a unit square. The total figure is now easily constructed. An idea of it may be gained by drawing all the four cubes in the catalogue figure in one (fig. 74). These cubes are exact repetitions of one another, so one drawing will serve as a representation of the whole series, if we take care to remember where we are, whether in a 0h, a 1h, a 2h, or a 3h figure, when we pick out the points required. Fig. 74 is a representation of all the catalogue cubes put in one. For the sake of clearness the front faces and the back faces of this cube are represented separately.
Here we have four cubes again, in the first of which all the points are 0k points; that is, points at a distance of zero in the k direction from the space of the three dimensions ijh. We have all the previously selected points, and some of the distances, which in the last diagram went from figure to figure, are shown here in the same figure and can be measured. For instance, consider the points 3120 to 3021, which in the first diagram (fig. 72) lie in the first and second figures. Their actual relation is shown in fig. 73 in the cube labeled 2K, where the relevant points are marked with a *. We can see that the distance in question is the diagonal of a unit square. Similarly, we find that the distance between corresponding points of any two hexagonal figures is the diagonal of a unit square. The total figure is now easily constructed. You can get an idea of it by drawing all four cubes from the catalog figure into one (fig. 74). These cubes are exact repetitions of one another, so one drawing can represent the entire series, as long as we remember where we are, whether in a 0h, a 1h, a 2h, or a 3h figure, when we select the required points. Fig. 74 is a representation of all the catalog cubes combined into one. For clarity, the front faces and back faces of this cube are shown separately.
The figure determined by the selected points is shown below.
The figure created by the chosen points is shown below.
In putting the sections together some of the outlines in them disappear. The line TW for instance is not wanted.
In putting the sections together, some of the outlines in them disappear. The line TW, for example, is not needed.
We notice that PQTW and TWRS are each the half of a hexagon. Now QV and VR lie in one straight line.[Pg 132] Hence these two hexagons fit together, forming one hexagon, and the line TW is only wanted when we consider a section of the whole figure, we thus obtain the solid represented in the lower part of fig. 74. Equal repetitions of this figure, called a tetrakaidecagon, will fill up three-dimensional space.
We can see that PQTW and TWRS each make up half of a hexagon. Now, QV and Virtual Reality are in a straight line. [Pg 132] Therefore, these two hexagons fit together to create one hexagon, and the line TW is only needed when we look at a section of the entire figure. This gives us the solid shown in the lower part of fig. 74. Repeating this shape, known as a tetrakaidecagon, will fill three-dimensional space.
To make the corresponding four-dimensional figure we have to take five axes mutually at right angles with five points on each. A catalogue of the positions determined in five-dimensional space can be found thus.
To create the corresponding four-dimensional figure, we need to set up five axes that are all at right angles to each other, with five points on each axis. A list of the positions defined in five-dimensional space can be found this way.
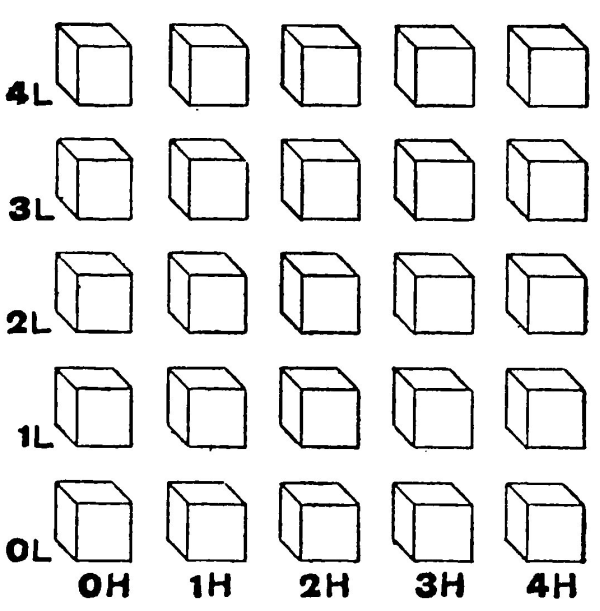
Take a cube with five points on each of its axes, the fifth point is at a distance of four units of length from the first on any one of the axes. And since the fourth dimension also stretches to a distance of four we shall need to represent the successive sets of points at distances 0, 1, 2, 3, 4, in the fourth dimensions, five cubes. Now all of these extend to no distance at all in the fifth dimension. To represent what lies in the fifth dimension we shall have to draw, starting from each of our cubes, five similar cubes to represent the four steps on in the fifth dimension. By this assemblage we get a catalogue of all the points shown in fig. 75, in which L represents the fifth dimension.
Take a cube with five points along each of its axes, with the fifth point being four units away from the first on any one of those axes. Since the fourth dimension also extends four units, we need to show the sets of points at distances 0, 1, 2, 3, and 4 in the fourth dimension, forming five cubes. All of these cubes do not extend at all in the fifth dimension. To represent what exists in the fifth dimension, we need to draw five similar cubes from each of our cubes to illustrate the four levels in the fifth dimension. With this arrangement, we create a list of all the points shown in fig. 75, where L represents the fifth dimension.
Now, as we saw before, there is nothing to prevent us from putting all the cubes representing the different stages in the fourth dimension in one figure, if we take[Pg 133] note when we look at it, whether we consider it as a 0h, a 1h, a 2h, etc., cube. Putting then the 0h, 1h, 2h, 3h, 4h cubes of each row in one, we have five cubes with the sides of each containing five positions, the first of these five cubes represents the 0l points, and has in it the i points from 0 to 4, the j points from 0 to 4, the k points from 0 to 4, while we have to specify with regard to any selection we make from it, whether we regard it as a 0h, a 1h, a 2h, a 3h, or a 4h figure. In fig. 76 each cube is represented by two drawings, one of the front part, the other of the rear part.
Now, as we discussed earlier, there's nothing stopping us from combining all the cubes that represent the different stages in the fourth dimension into a single figure. When we look at it, we need to take note of whether we see it as a 0
Let then our five cubes be arranged before us and our selection be made according to the rule. Take the first figure in which all points are 0l points. We cannot have 0 with any other letter. Then, keeping in the first figure, which is that of the 0l positions, take first of all that selection which always contains 1h. We suppose, therefore, that the cube is a 1h cube, and in it we take i, j, k in combination with 4, 3, 2 according to the rule.
Let our five cubes be arranged in front of us, and let’s make our selection according to the rules. Take the first figure where all points are 0l points. We can’t have 0 with any other letter. Then, while keeping in the first figure, which represents the 0l positions, take that selection which always includes 1h first. So, we assume that the cube is a 1h cube, and in it, we take i, j, k in combination with 4, 3, 2 following the rule.
The figure we obtain is a hexagon, as shown, the one in front. The points on the right hand have the same figures as those on the left, with the first two numerals interchanged. Next keeping still to the 0l figure let us suppose that the cube before us represents a section at a distance of 2 in the h direction. Let all the points in it be considered as 2h points. We then have a 0l, 2h region, and have the sets ijk and 431 left over. We must then pick out in accordance with our rule all such points as 4i, 3j, 1k.
The shape we have is a hexagon, as shown, the one in front. The points on the right side have the same shapes as those on the left, with the first two numbers switched. Next, staying with the 0l figure, let's assume that the cube in front of us represents a section at a distance of 2 in the h direction. Let's consider all the points in it as 2h points. We then have a 0l, 2h region, and the sets ijk and 431 remaining. We need to pick out, according to our rule, all such points as 4i, 3j, 1k.
These are shown in the figure and we find that we can draw them without confusion, forming the second hexagon from the front. Going on in this way it will be seen that in each of the five figures a set of hexagons is picked out, which put together form a three-space figure something like the tetrakaidecagon.
These are displayed in the figure, and we see that we can draw them clearly, creating the second hexagon from the front. Continuing in this manner, it becomes apparent that in each of the five figures, a set of hexagons is identified, which combined, create a three-dimensional figure somewhat resembling the tetrakaidecagon.
[Pg 134]
[Pg 134]
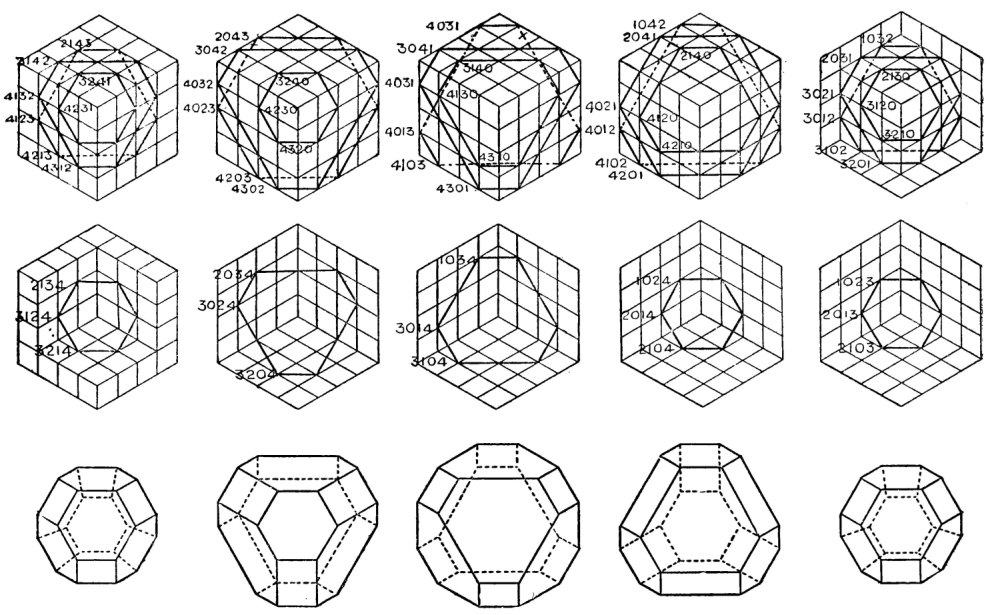
[Pg 135]
[Pg 135]
These separate figures are the successive stages in which the whole four-dimensional figure in which they cohere can be apprehended.
These separate figures represent the different stages in which the entire four-dimensional figure they are part of can be understood.
The first figure and the last are tetrakaidecagons. These are two of the solid boundaries of the figure. The other solid boundaries can be traced easily. Some of them are complete from one face in the figure to the corresponding face in the next, as for instance the solid which extends from the hexagonal base of the first figure to the equal hexagonal base of the second figure. This kind of boundary is a hexagonal prism. The hexagonal prism also occurs in another sectional series, as for instance, in the square at the bottom of the first figure, the oblong at the base of the second and the square at the base of the third figure.
The first and last shapes are tetrakaidecagons. These are two of the solid edges of the shape. The other solid edges can be easily outlined. Some of them run completely from one face of the shape to the corresponding face of the next, like the solid connection that extends from the hexagonal base of the first shape to the matching hexagonal base of the second shape. This type of edge is a hexagonal prism. The hexagonal prism also appears in another sequence of sections, such as in the square at the bottom of the first shape, the rectangle at the base of the second, and the square at the base of the third shape.
Other solid boundaries can be traced through four of the five sectional figures. Thus taking the hexagon at the top of the first figure we find in the next a hexagon also, of which some alternate sides are elongated. The top of the third figure is also a hexagon with the other set of alternate rules elongated, and finally we come in the fourth figure to a regular hexagon.
Other solid boundaries can be seen in four of the five sectional figures. Starting with the hexagon at the top of the first figure, we see another hexagon in the next one, with some alternate sides stretched out. The top of the third figure is also a hexagon where the other set of alternate sides is elongated, and finally, in the fourth figure, we arrive at a regular hexagon.
These four sections are the sections of a tetrakaidecagon as can be recognised from the sections of this figure which we have had previously. Hence the boundaries are of two kinds, hexagonal prisms and tetrakaidecagons.
These four sections are the parts of a tetrakaidecagon, which can be seen in the sections of this figure we looked at earlier. So, the boundaries are of two types: hexagonal prisms and tetrakaidecagons.
These four-dimensional figures exactly fill four-dimensional space by equal repetitions of themselves.
These four-dimensional shapes completely occupy four-dimensional space by repeating themselves equally.
[Pg 136]
[Pg 136]
CHAPTER XI
NOMENCLATURE AND ANALOGIES PRELIMINARY
TO THE STUDY OF FOUR-DIMENSIONAL
FIGURES
In the following pages a method of designating different regions of space by a systematic colour scheme has been adopted. The explanations have been given in such a manner as to involve no reference to models, the diagrams will be found sufficient. But to facilitate the study a description of a set of models is given in an appendix which the reader can either make for himself or obtain. If models are used the diagrams in Chapters XI. and XII. will form a guide sufficient to indicate their use. Cubes of the colours designated by the diagrams should be picked out and used to reinforce the diagrams. The reader, in the following description, should suppose that a board or wall stretches away from him, against which the figures are placed.
In the following pages, a way of identifying different areas of space using a systematic color scheme has been adopted. The explanations have been provided in such a way that they don't reference models; the diagrams should be enough. However, to make the study easier, a description of a set of models is included in an appendix that the reader can either create themselves or obtain. If models are used, the diagrams in Chapters XI. and XII. will serve as a sufficient guide for their use. Cubes of the colors indicated by the diagrams should be selected and used to support the diagrams. The reader should imagine that a board or wall extends away from them, against which the figures are displayed.

Take a square, one of those shown in Fig. 77 and give it a neutral colour, let this colour be called “null,” and be such that it makes no appreciable difference[Pg 137] to any colour with which it mixed. If there is no such real colour let us imagine such a colour, and assign to it the properties of the number zero, which makes no difference in any number to which it is added.
Take a square, like the one shown in Fig. 77, and give it a neutral color, which we’ll call “null.” This color should be such that it doesn’t noticeably change any color it’s mixed with. If there isn’t an actual color like that, let’s imagine one and assign it the properties of the number zero, which doesn’t affect any number when it’s added to it.[Pg 137]
Above this square place a red square. Thus we symbolise the going up by adding red to null.
Above this square, place a red square. This way, we symbolize the ascent by adding red to nothing.
Away from this null square place a yellow square, and represent going away by adding yellow to null.
Away from this empty square, add a yellow square, representing departure by incorporating yellow into emptiness.
To complete the figure we need a fourth square. Colour this orange, which is a mixture of red and yellow, and so appropriately represents a going in a direction compounded of up and away. We have thus a colour scheme which will serve to name the set of squares drawn. We have two axes of colours—red and yellow—and they may occupy as in the figure the direction up and away, or they may be turned about; in any case they enable us to name the four squares drawn in their relation to one another.
To finish the figure, we need a fourth square. Color this one orange, which is a mix of red and yellow, and it fittingly represents a direction that combines upward and outward. Now we have a color scheme that names the set of squares we've drawn. We have two color axes—red and yellow—and they can point in the direction of up and away, or they can be rotated; either way, they help us name the four squares based on their relationships to each other.
Now take, in Fig. 78, nine squares, and suppose that at the end of the going in any direction the colour started with repeats itself.
Now look at Fig. 78, where there are nine squares, and imagine that at the end of moving in any direction, the starting color repeats itself.
We obtain a square named as shown.
We get a square as shown.
Let us now, in fig. 79, suppose the number of squares to be increased, keeping still to the principle of colouring already used.
Let’s now, in fig. 79, assume that the number of squares will be increased while still following the coloring principle that has already been used.
Here the nulls remain four in number. There are three reds between the first null and the null above it, three yellows between the first null and the[Pg 138] null beyond it, while the oranges increase in a double way.
Here, the nulls are still four in total. There are three reds between the first null and the null above it, three yellows between the first null and the [Pg 138] null beyond it, while the oranges are doubling in number.

Suppose this process of enlarging the number of the squares to be indefinitely pursued and the total figure obtained to be reduced in size, we should obtain a square of which the interior was all orange, while the lines round it were red and yellow, and merely the points null colour, as in fig. 80. Thus all the points, lines, and the area would have a colour.
Suppose we continue to increase the number of squares indefinitely and reduce the total shape's size; we would end up with a square that is completely orange inside, while the edges are red and yellow, and only the points have no color, like in fig. 80. In this way, all the points, lines, and the area would have a color.

We can consider this scheme to originate thus:—Let a null point move in a yellow direction and trace out a yellow line and end in a null point. Then let the whole line thus traced move in a red direction. The null points at the ends of the line will produce red lines, and end in[Pg 139] null points. The yellow line will trace out a yellow and red, or orange square.
We can think of this plan like this:—Imagine a point moving in a yellow direction, creating a yellow line that ends back at a point. Next, let the entire line move in a red direction. The points at either end of the line will create red lines and also end at points. The yellow line will shape a yellow and red, or orange, square.
Now, turning back to fig. 78, we see that these two ways of naming, the one we started with and the one we arrived at, can be combined.
Now, going back to fig. 78, we see that these two ways of naming, the one we began with and the one we ended up with, can be combined.
By its position in the group of four squares, in fig. 77, the null square has a relation to the yellow and to the red directions. We can speak therefore of the red line of the null square without confusion, meaning thereby the line AB, fig. 81, which runs up from the initial null point A in the figure as drawn. The yellow line of the null square is its lower horizontal line AC as it is situated in the figure.
By its placement in the group of four squares, in fig. 77, the null square is related to both the yellow and red directions. So, we can talk about the red line of the null square without any confusion, referring to the line AB, fig. 81, which extends upward from the original null point A in the drawing. The yellow line of the null square is its lower horizontal line AC as positioned in the figure.

If we wish to denote the upper yellow line BD, fig. 81, we can speak of it as the yellow γ line, meaning the yellow line which is separated from the primary yellow line by the red movement.
If we want to refer to the upper yellow line BD, fig. 81, we can call it the yellow γ line, which means the yellow line that is set apart from the main yellow line by the red movement.
In a similar way each of the other squares has null points, red and yellow lines. Although the yellow square is all yellow, its line CD, for instance, can be referred to as its red line.
In the same way, each of the other squares has null points, red and yellow lines. Even though the yellow square is completely yellow, its line CD, for example, can be called its red line.
This nomenclature can be extended.
This naming system can be expanded.
If the eight cubes drawn, in fig. 82, are put close together, as on the right hand of the diagram, they form a cube, and in them, as thus arranged, a going up is represented by adding red to the zero, or null colour, a going away by adding yellow, a going to the right by adding white. White is used as a colour, as a pigment, which produces a colour change in the pigments with which it is mixed. From whatever cube of the lower set we start, a motion up brings us to a cube showing a change to red, thus light yellow becomes light yellow red, or light orange, which is called ochre. And going to the[Pg 140] right from the null on the left we have a change involving the introduction of white, while the yellow change runs from front to back. There are three colour axes—the red, the white, the yellow—and these run in the position the cubes occupy in the drawing—up, to the right, away—but they could be turned about to occupy any positions in space.
If the eight cubes shown in fig. 82 are placed close together, like on the right side of the diagram, they create a cube. In this arrangement, moving up is represented by adding red to the zero or null color, moving away is shown by adding yellow, and moving to the right is indicated by adding white. White functions as a color and a pigment that alters the color of the pigments it's mixed with. No matter which cube of the lower set we start from, moving up takes us to a cube that changes to red, so light yellow transforms into light yellow red, or light orange, which is called ochre. By moving to the right from the null on the left, we see a change that involves adding white, while the yellow change extends from front to back. There are three color axes—red, white, and yellow—and these align with the positions of the cubes in the drawing—up, to the right, and away—but they could be rotated to occupy any positions in space.


We can conveniently represent a block of cubes by three sets of squares, representing each the base of a cube.
We can easily represent a block of cubes with three sets of squares, each representing the base of a cube.
Thus the block, fig. 83, can be represented by the[Pg 141] layers on the right. Here, as in the case of the plane, the initial colours repeat themselves at the end of the series.
Thus the block, fig. 83, can be represented by the[Pg 141] layers on the right. Here, just like in the case of the plane, the initial colors repeat themselves at the end of the series.
Proceeding now to increase the number of the cubes we obtain fig. 84, in which the initial letters of the colours are given instead of their full names.
Proceeding now to increase the number of the cubes we obtain fig. 84, in which the first letters of the colors are given instead of their full names.
Here we see that there are four null cubes as before, but the series which spring from the initial corner will tend to become lines of cubes, as also the sets of cubes parallel to them, starting from other corners. Thus, from the initial null springs a line of red cubes, a line of white cubes, and a line of yellow cubes.
Here we see that there are four empty cubes as before, but the series that comes from the starting corner will tend to become lines of cubes, just like the sets of cubes parallel to them, starting from other corners. So, from the original empty space comes a line of red cubes, a line of white cubes, and a line of yellow cubes.
If the number of the cubes is largely increased, and the size of the whole cube is diminished, we get a cube with null points, and the edges coloured with these three colours.
If the number of cubes is significantly increased, and the size of the entire cube is reduced, we end up with a cube that has no points, and the edges colored with these three colors.
The light yellow cubes increase in two ways, forming ultimately a sheet of cubes, and the same is true of the orange and pink sets. Hence, ultimately the cube[Pg 142] thus formed would have red, white, and yellow lines surrounding pink, orange, and light yellow faces. The ochre cubes increase in three ways, and hence ultimately the whole interior of the cube would be coloured ochre.
The light yellow cubes increase in two ways, ultimately creating a sheet of cubes, and the same goes for the orange and pink sets. Therefore, in the end, the cube[Pg 142] formed would have red, white, and yellow lines surrounding pink, orange, and light yellow faces. The ochre cubes increase in three ways, so ultimately, the entire interior of the cube would be colored ochre.
We have thus a nomenclature for the points, lines, faces, and solid content of a cube, and it can be named as exhibited in fig. 85.
We now have a naming system for the points, lines, surfaces, and solid contents of a cube, and it can be referred to as shown in fig. 85.

We can consider the cube to be produced in the following way. A null point moves in a direction to which we attach the colour indication yellow; it generates a yellow line and ends in a null point. The yellow line thus generated moves in a direction to which we give the colour indication red. This lies up in the figure. The yellow line traces out a yellow, red, or orange square, and each of its null points trace out a red line, and ends in a null point.
We can think of the cube being created like this. A starting point moves in a direction we call yellow; it creates a yellow line that ends at a starting point. The yellow line then moves in a direction we call red. This is shown in the figure. The yellow line outlines a yellow, red, or orange square, and each of its starting points creates a red line that ends at a starting point.
This orange square moves in a direction to which we attribute the colour indication white, in this case the direction is the right. The square traces out a cube coloured orange, red, or ochre, the red lines trace out red to white or pink squares, and the yellow lines trace out light yellow squares, each line ending in a line of its own colour. While the points each trace out a null + white, or white line to end in a null point.
This orange square moves in a direction that we associate with the color white, which in this case is to the right. The square outlines a cube in orange, red, or ochre, with red lines forming red to white or pink squares, and yellow lines creating light yellow squares, each line ending with a line of its own color. Meanwhile, the points each outline a null + white, or a white line that ends in a null point.
Now returning to the first block of eight cubes we can name each point, line, and square in them by reference to the colour scheme, which they determine by their relation to each other.
Now returning to the first block of eight cubes, we can identify each point, line, and square in them based on the color scheme, which they define through their relationships with one another.
Thus, in fig. 86, the null cube touches the red cube by[Pg 143] a light yellow square; it touches the yellow cube by a pink square, and touches the white cube by an orange square.
Thus, in fig. 86, the empty cube contacts the red cube through a light yellow square; it connects with the yellow cube via a pink square, and touches the white cube through an orange square.[Pg 143]
There are three axes to which the colours red, yellow, and white are assigned, the faces of each cube are designated by taking these colours in pairs. Taking all the colours together we get a colour name for the solidity of a cube.
There are three axes that the colors red, yellow, and white are assigned to. The sides of each cube are identified by pairing these colors. When we combine all the colors, we get a color name for the solidity of a cube.
Let us now ask ourselves how the cube could be presented to the plane being. Without going into the question of how he could have a real experience of it, let us see how, if we could turn it about and show it to him, he, under his limitations, could get information about it. If the cube were placed with its red and yellow axes against a plane, that is resting against it by its orange face, the plane being would observe a square surrounded by red and yellow lines, and having null points. See the dotted square, fig. 87.
Let’s now consider how the cube could be shown to the flat being. Without discussing how he could actually experience it, let’s consider how, if we could rotate it and present it to him, he could gather information about it within his limitations. If the cube were positioned with its red and yellow axes against a plane, resting against it with its orange face, the flat being would see a square outlined by red and yellow lines, and having no points. See the dotted square, fig. 87.

We could turn the cube about the red line so that a different face comes into juxtaposition with the plane.
We can rotate the cube around the red line so that a different face aligns with the plane.
Suppose the cube turned about the red line. As it[Pg 144] is turning from its first position all of it except the red line leaves the plane—goes absolutely out of the range of the plane being’s apprehension. But when the yellow line points straight out from the plane then the pink face comes into contact with it. Thus the same red line remaining as he saw it at first, now towards him comes a face surrounded by white and red lines.
Suppose the cube turns around the red line. As it[Pg 144] rotates from its initial position, everything except the red line moves out of view—completely out of the plane's range of perception. But when the yellow line sticks straight out from the plane, the pink face comes into contact with it. So, while the red line stays the same as he saw it initially, a face surrounded by white and red lines approaches him now.

If we call the direction to the right the unknown direction, then the line he saw before, the yellow line, goes out into this unknown direction, and the line which before went into the unknown direction, comes in. It comes in in the opposite direction to that in which the yellow line ran before; the interior of the face now against the plane is pink. It is a property of two lines at right angles that, if one turns out of a given direction and stands at right angles to it, then the other of the two lines comes in, but runs the opposite way in that given direction, as in fig. 88.
If we refer to the direction to the right as the unknown direction, then the yellow line he saw earlier extends into this unknown direction, while the line that previously entered this unknown direction now comes in. It approaches from the opposite direction to the way the yellow line was going before; the part of the face that's now against the plane is pink. It’s a characteristic of two lines at right angles that if one turns out of a specific direction and stands at right angles to it, then the other line comes in but goes the opposite way in that specific direction, as in fig. 88.
Now these two presentations of the cube would seem, to the plane creature like perfectly different material bodies, with only that line in common in which they both meet.
Now these two representations of the cube would appear, to someone living in a flat world, as completely different solid objects, with only the single line where they both intersect in common.
Again our cube can be turned about the yellow line. In this case the yellow square would disappear as before, but a new square would come into the plane after the cube had rotated by an angle of 90° about this line. The bottom square of the cube would come in thus in figure 89. The cube supposed in contact with the plane is rotated about the lower yellow line and then the bottom face is in contact with the plane.
Again, our cube can be rotated around the yellow line. In this situation, the yellow square would vanish as before, but a new square would appear in the plane after the cube has turned by an angle of 90° around this line. The bottom square of the cube would show up like in figure 89. The cube, when in contact with the plane, is rotated around the lower yellow line, and then the bottom face comes into contact with the plane.
Here, as before, the red line going out into the unknown dimension, the white line which before ran in the[Pg 145] unknown dimension would come in downwards in the opposite sense to that in which the red line ran before.
Here, just like before, the red line extends into the unknown dimension, while the white line, which previously ran in the[Pg 145] unknown dimension, will now come in downwards, opposite to the direction in which the red line was running before.

Now if we use i, j, k, for the three space directions, i left to right, j from near away, k from below up; then, using the colour names for the axes, we have that first of all white runs i, yellow runs j, red runs k; then after the first turning round the k axis, white runs negative j, yellow runs i, red runs k; thus we have the table:—
Now, if we use i, j, and k for the three directions in space, where i is left to right, j is near to far, and k is bottom to top; then, if we apply color names to the axes, we see that initially, white corresponds to i, yellow corresponds to j, and red corresponds to k. After the first rotation around the k axis, white becomes negative j, yellow aligns with i, and red remains k. Thus, we have the table:—
| i | j | k | |
| 1st position | white | yellow | red |
| 2nd position | yellow | white— | red |
| 3rd position | red | yellow | white— |
Here white with a negative sign after it in the column under j means that white runs in the negative sense of the j direction.
Here, white with a negative sign after it in the column under j means that white moves in the negative direction of the j axis.
We may express the fact in the following way:— In the plane there is room for two axes while the body has three. Therefore in the plane we can represent any two. If we want to keep the axis that goes in the unknown dimension always running in the positive sense, then the axis which originally ran in the unknown[Pg 146] dimension (the white axis) must come in in the negative sense of that axis which goes out of the plane into the unknown dimension.
We can put it this way: In the plane, there’s space for two axes, while the body has three. So, in the plane, we can represent any two. If we want to keep the axis that goes into the unknown dimension always moving in the positive direction, then the axis that initially went into the unknown dimension (the white axis) needs to come in from the negative direction of the axis that extends out of the plane into the unknown dimension.[Pg 146]
It is obvious that the unknown direction, the direction in which the white line runs at first, is quite distinct from any direction which the plane creature knows. The white line may come in towards him, or running down. If he is looking at a square, which is the face of a cube (looking at it by a line), then any one of the bounding lines remaining unmoved, another face of the cube may come in, any one of the faces, namely, which have the white line in them. And the white line comes sometimes in one of the space directions he knows, sometimes in another.
It’s clear that the unknown direction, the one where the white line initially appears, is different from any direction the plane creature understands. The white line might approach him or run downward. If he’s looking at a square, which represents a face of a cube (viewing it through a line), then any of the bordering lines staying in place can reveal another face of the cube, specifically one that contains the white line. And the white line can sometimes appear in one of the spatial directions he recognizes, and at other times in a different one.
Now this turning which leaves a line unchanged is something quite unlike any turning he knows in the plane. In the plane a figure turns round a point. The square can turn round the null point in his plane, and the red and yellow lines change places, only of course, as with every rotation of lines at right angles, if red goes where yellow went, yellow comes in negative of red’s old direction.
Now, this rotation that keeps one line the same is completely different from any rotation he’s familiar with on a flat surface. On a flat surface, a shape rotates around a point. The square can rotate around the origin in his flat space, and the red and yellow lines swap places, but of course, just like with every rotation of lines at right angles, if red goes where yellow was, yellow comes in the opposite direction of where red used to be.
This turning, as the plane creature conceives it, we should call turning about an axis perpendicular to the plane. What he calls turning about the null point we call turning about the white line as it stands out from his plane. There is no such thing as turning about a point, there is always an axis, and really much more turns than the plane being is aware of.
This rotation, as the flat creature sees it, should be called rotation around an axis that is upright to the flat surface. What he refers to as rotating around the null point is what we call rotating around the white line that stands out from his flat surface. There’s no such thing as rotating around a point; there’s always an axis, and in reality, there are far more rotations happening than the flat being realizes.
Taking now a different point of view, let us suppose the cubes to be presented to the plane being by being passed transverse to his plane. Let us suppose the sheet of matter over which the plane being and all objects in his world slide, to be of such a nature that objects can pass through it without breaking it. Let us suppose it to be of the same nature as the film of a soap bubble, so that[Pg 147] it closes around objects pushed through it, and, however the object alters its shape as it passes through it, let us suppose this film to run up to the contour of the object in every part, maintaining its plane surface unbroken.
Now, taking a different perspective, let’s imagine the cubes being presented to the plane being by passing through his plane from above or below. Let’s assume that the layer of matter over which the plane being and all the objects in his world move is designed in such a way that objects can pass through it without damaging it. Let’s picture it being similar to the film of a soap bubble, so that it surrounds the objects being pushed through it. No matter how the shape of the object changes as it moves through, let’s think of this film adjusting to fit the outline of the object at every point, keeping its flat surface intact. [Pg 147]
Then we can push a cube or any object through the film and the plane being who slips about in the film will know the contour of the cube just and exactly where the film meets it.
Then we can push a cube or any object through the film, and the being that shifts around in the film will know the exact shape of the cube right where the film touches it.

Fig. 90 represents a cube passing through a plane film. The plane being now comes into contact with a very thin slice of the cube somewhere between the left and right hand faces. This very thin slice he thinks of as having no thickness, and consequently his idea of it is what we call a section. It is bounded by him by pink lines front and back, coming from the part of the pink face he is in contact with, and above and below, by light yellow lines. Its corners are not null-coloured points, but white points, and its interior is ochre, the colour of the interior of the cube.
Fig. 90 shows a cube passing through a flat surface. The surface now touches a very thin slice of the cube somewhere between the left and right faces. He imagines this very thin slice as having no thickness, so he thinks of it as what we call a section. It is outlined by pink lines at the front and back, coming from the part of the pink face that it touches, and by light yellow lines at the top and bottom. Its corners are not colorless points, but white points, and its interior is ochre, the color of the inside of the cube.
If now we suppose the cube to be an inch in each dimension, and to pass across, from right to left, through the plane, then we should explain the appearances presented to the plane being by saying: First of all you have the face of a cube, this lasts only a moment; then you have a figure of the same shape but differently coloured. This, which appears not to move to you in any direction which you know of, is really moving transverse to your plane world. Its appearance is unaltered, but each moment it is something different—a section further on, in the white, the unknown dimension. Finally, at the[Pg 148] end of the minute, a face comes in exactly like the face you first saw. This finishes up the cube—it is the further face in the unknown dimension.
If we imagine the cube to be one inch in each dimension and it moves from right to left through the plane, we can explain what the plane sees: First, you see the face of the cube, but that lasts only a moment; then you see a shape that is the same but a different color. This shape, which seems to be stationary to you, is actually moving across your plane world. Its appearance stays the same, but every moment it is something new—a section further along in the white, unknown dimension. Finally, at the[Pg 148] end of the minute, a face appears that looks exactly like the first face you saw. This concludes the cube—it’s the far face in the unknown dimension.
The white line, which extends in length just like the red or the yellow, you do not see as extensive; you apprehend it simply as an enduring white point. The null point, under the condition of movement of the cube, vanishes in a moment, the lasting white point is really your apprehension of a white line, running in the unknown dimension. In the same way the red line of the face by which the cube is first in contact with the plane lasts only a moment, it is succeeded by the pink line, and this pink line lasts for the inside of a minute. This lasting pink line in your apprehension of a surface, which extends in two dimensions just like the orange surface extends, as you know it, when the cube is at rest.
The white line, which stretches just like the red or yellow lines, isn’t perceived as extensive; instead, you see it as a persistent white point. The null point, when the cube is moving, disappears in an instant, while the enduring white point is really how you perceive a white line that runs in an unknown dimension. Similarly, the red line of the face where the cube first touches the plane lasts only a moment before being replaced by the pink line, which lasts for about half a minute. This lasting pink line shapes your perception of a surface, extending in two dimensions just like the orange surface does when the cube is at rest.
But the plane creature might answer, “This orange object is substance, solid substance, bounded completely and on every side.”
But the plane creature might reply, “This orange object is a substance, solid substance, completely enclosed on all sides.”
Here, of course, the difficulty comes in. His solid is our surface—his notion of a solid is our notion of an abstract surface with no thickness at all.
Here, of course, is where the difficulty arises. His solid is our surface—his idea of a solid is our idea of an abstract surface with no thickness whatsoever.
We should have to explain to him that, from every point of what he called a solid, a new dimension runs away. From every point a line can be drawn in a direction unknown to him, and there is a solidity of a kind greater than that which he knows. This solidity can only be realised by him by his supposing an unknown direction, by motion in which what he conceives to be solid matter instantly disappears. The higher solid, however, which extends in this dimension as well as in those which he knows, lasts when a motion of that kind takes place, different sections of it come consecutively in the plane of his apprehension, and take the place of the solid which he at first conceives to be all. Thus, the higher solid—our[Pg 149] solid in contradistinction to his area solid, his two-dimensional solid, must be conceived by him as something which has duration in it, under circumstances in which his matter disappears out of his world.
We need to explain to him that, from every point of what he calls a solid, a new dimension extends. From every point, a line can be drawn in a direction unknown to him, and there is a kind of solidity greater than what he understands. He can only grasp this solidity by imagining an unknown direction, by moving in such a way that what he thinks of as solid matter instantly vanishes. However, the higher solid, which exists in this dimension as well as in the ones he knows, persists when such motion occurs; different sections of it come into his awareness one after the other and replace the solid he initially thinks is all there is. Therefore, the higher solid—our solid, in contrast to his area solid, his two-dimensional solid—must be conceived by him as something that has duration, in conditions where his matter disappears from his world.
We may put the matter thus, using the conception of motion.
We can frame the issue this way, using the idea of movement.
A null point moving in a direction away generates a yellow line, and the yellow line ends in a null point. We suppose, that is, a point to move and mark out the products of this motion in such a manner. Now suppose this whole line as thus produced to move in an upward direction; it traces out the two-dimensional solid, and the plane being gets an orange square. The null point moves in a red line and ends in a null point, the yellow line moves and generates an orange square and ends in a yellow line, the farther null point generates a red line and ends in a null point. Thus, by movement in two successive directions known to him, he can imagine his two-dimensional solid produced with all its boundaries.
A null point moving away creates a yellow line, which ends at another null point. We assume that this point moves and outlines the results of this movement in a certain way. Now, let's say this entire line moves upward; it creates a two-dimensional solid, and the resulting shape is an orange square. The null point moves in a red line and ends at a null point, the yellow line shifts and forms an orange square and finishes as a yellow line, while the farther null point creates a red line and concludes at another null point. Thus, by moving in two known directions, he can visualize the entire two-dimensional solid along with all its boundaries.
Now we tell him: “This whole two-dimensional solid can move in a third or unknown dimension to you. The null point moving in this dimension out of your world generates a white line and ends in a null point. The yellow line moving generates a light yellow two-dimensional solid and ends in a yellow line, and this two-dimensional solid, lying end on to your plane world, is bounded on the far side by the other yellow line. In the same way each of the lines surrounding your square traces out an area, just like the orange area you know. But there is something new produced, something which you had no idea of before; it is that which is produced by the movement of the orange square. That, than which you can imagine nothing more solid, itself moves in a direction open to it and produces a three-dimensional[Pg 150] solid. Using the addition of white to symbolise the products of this motion this new kind of solid will be light orange or ochre, and it will be bounded on the far side by the final position of the orange square which traced it out, and this final position we suppose to be coloured like the square in its first position, orange with yellow and red boundaries and null corners.”
Now we tell him: “This entire two-dimensional shape can move in a third or unknown dimension to you. The point that doesn't exist moving in this dimension outside your world creates a white line and ends at a nonexistent point. The yellow line in motion produces a light yellow two-dimensional shape and ends with a yellow line, and this two-dimensional shape, lying directly against your flat world, is bordered on the far side by the other yellow line. Similarly, each of the lines surrounding your square outlines an area, just like the orange area you’re familiar with. But there’s something new being created, something you had no idea about before; it’s what results from the movement of the orange square. That, which you can’t imagine being anything more solid, itself moves in a direction available to it and creates a three-dimensional[Pg 150] solid. By introducing white to represent the results of this motion, this new type of solid will be light orange or ochre, and it will be bordered on the far side by the final position of the orange square that traced it out, and we assume this final position is colored like the square in its initial position, orange with yellow and red edges and nonexistent corners.”
This product of movement, which it is so easy for us to describe, would be difficult for him to conceive. But this difficulty is connected rather with its totality than with any particular part of it.
This product of movement, which is so easy for us to describe, would be tough for him to grasp. But this challenge is more related to its entirety than to any specific part of it.
Any line, or plane of this, to him higher, solid we could show to him, and put in his sensible world.
Any line or plane of this, which he perceives as higher and solid, we could present to him and incorporate into his understanding of the world.
We have already seen how the pink square could be put in his world by a turning of the cube about the red line. And any section which we can conceive made of the cube could be exhibited to him. You have simply to turn the cube and push it through, so that the plane of his existence is the plane which cuts out the given section of the cube, then the section would appear to him as a solid. In his world he would see the contour, get to any part of it by digging down into it.
We have already seen how the pink square could fit into his world by rotating the cube around the red line. Any section we can imagine from the cube could be shown to him. You just need to rotate the cube and push it through, so that the plane of his existence intersects with the plane that cuts out the specific section of the cube; then, that section would appear to him as a solid. In his world, he would see the outline and could access any part of it by digging into it.
The Process by which a Plane Being would gain a Notion of a Solid.
The way a plane being would comprehend a solid.
If we suppose the plane being to have a general idea of the existence of a higher solid—our solid—we must next trace out in detail the method, the discipline, by which he would acquire a working familiarity with our space existence. The process begins with an adequate realisation of a simple solid figure. For this purpose we will suppose eight cubes forming a larger cube, and first we will suppose each cube to be coloured throughout uniformly.[Pg 151] Let the cubes in fig. 91 be the eight making a larger cube.
If we assume that a flat being has a general understanding of the existence of a higher solid—ours—then we need to outline in detail the methods and discipline they would use to become familiar with our three-dimensional existence. The process starts with a clear understanding of a simple solid shape. For this, let's imagine eight cubes coming together to form a larger cube, and to begin, we will assume each cube is uniformly colored throughout.[Pg 151] Let's designate the cubes in fig. 91 as the eight that make up the larger cube.

Now, although each cube is supposed to be coloured entirely through with the colour, the name of which is written on it, still we can speak of the faces, edges, and corners of each cube as if the colour scheme we have investigated held for it. Thus, on the null cube we can speak of a null point, a red line, a white line, a pink face, and so on. These colour designations are shown on No. 1 of the views of the tesseract in the plate. Here these colour names are used simply in their geometrical significance. They denote what the particular line, etc., referred to would have as its colour, if in reference to the particular cube the colour scheme described previously were carried out.
Now, even though each cube is supposed to be completely filled with the color indicated on it, we can still refer to the faces, edges, and corners of each cube as if the color scheme we've explored applies to it. So, for the null cube, we can talk about a null point, a red line, a white line, a pink face, and so on. These color labels are shown in No. 1 of the tesseract views in the plate. Here, these color names are used purely in their geometric context. They indicate what color the specific line, etc., would have if the color scheme described earlier were applied to the particular cube.
If such a block of cubes were put against the plane and then passed through it from right to left, at the rate of an inch a minute, each cube being an inch each way, the plane being would have the following appearances:—
If a block of cubes were placed against the plane and then moved through it from right to left at a speed of an inch a minute, with each cube measuring an inch on each side, the plane would appear as follows:—
First of all, four squares null, yellow, red, orange, lasting each a minute; and secondly, taking the exact places of these four squares, four others, coloured white, light yellow, pink, ochre. Thus, to make a catalogue of the solid body, he would have to put side by side in his world two sets of four squares each, as in fig. 92. The first[Pg 152] are supposed to last a minute, and then the others to come in in place of them, and also last a minute.
First of all, there are four squares: null, yellow, red, and orange, each lasting one minute. Secondly, replacing these four squares are four others, colored white, light yellow, pink, and ochre. To create a catalog of the solid body, he would need to place two sets of four squares side by side in his world, as in fig. 92. The first[Pg 152] are meant to last a minute, after which the others will take their place and also last a minute.

In speaking of them he would have to denote what part of the respective cube each square represents. Thus, at the beginning he would have null cube orange face, and after the motion had begun he would have null cube ochre section. As he could get the same coloured section whichever way the cube passed through, it would be best for him to call this section white section, meaning that it is transverse to the white axis. These colour-names, of course, are merely used as names, and do not imply in this case that the object is really coloured. Finally, after a minute, as the first cube was passing beyond his plane he would have null cube orange face again.
In discussing them, he would need to specify which part of each cube corresponds to each square. So, at the start, he would have a null cube with an orange face, and once the motion started, he would have a null cube with an ochre section. Since he could get the same colored section no matter how the cube moved, it would be best to refer to this section as the white section, meaning it's aligned with the white axis. These color names are just labels and don’t mean that the object is actually colored. Finally, after a minute, as the first cube was moving out of his view, he would see the null cube with the orange face again.
The same names will hold for each of the other cubes, describing what face or section of them the plane being has before him; and the second wall of cubes will come on, continue, and go out in the same manner. In the area he thus has he can represent any movement which we carry out in the cubes, as long as it does not involve a motion in the direction of the white axis. The relation of parts that succeed one another in the direction of the white axis is realised by him as a consecution of states.
The same names will apply to each of the other cubes, describing which face or section the plane has in front of it; the second wall of cubes will continue on and exit in the same way. In the space he has, he can represent any movement we perform in the cubes, as long as it doesn’t involve moving along the white axis. The relationship between parts that follow one another along the white axis is understood by him as a sequence of states.
Now, his means of developing his space apprehension lies in this, that that which is represented as a time sequence in one position of the cubes, can become a real co-existence, if something that has a real co-existence becomes a time sequence.
Now, his way of developing his understanding of space is this: what is shown as a time sequence in one arrangement of the cubes can turn into a real coexistence, if something that exists in reality becomes a time sequence.
[Pg 153]
[Pg 153]
We must suppose the cubes turned round each of the axes, the red line, and the yellow line, then something, which was given as time before, will now be given as the plane creature’s space; something, which was given as space before, will now be given as a time series as the cube is passed through the plane.
We have to assume the cubes rotate around each axis, the red line and the yellow line. Then, something that was previously considered time will now be seen as the space of the plane creature; and something that was seen as space before will now be represented as a timeline as the cube moves through the plane.
The three positions in which the cubes must be studied are the one given above and the two following ones. In each case the original null point which was nearest to us at first is marked by an asterisk. In figs. 93 and 94 the point marked with a star is the same in the cubes and in the plane view.
The three positions where the cubes need to be examined are the one mentioned above and the two that follow. In each case, the original null point that was closest to us at first is indicated by an asterisk. In figs. 93 and 94, the point marked with a star is the same in both the cubes and the plane view.
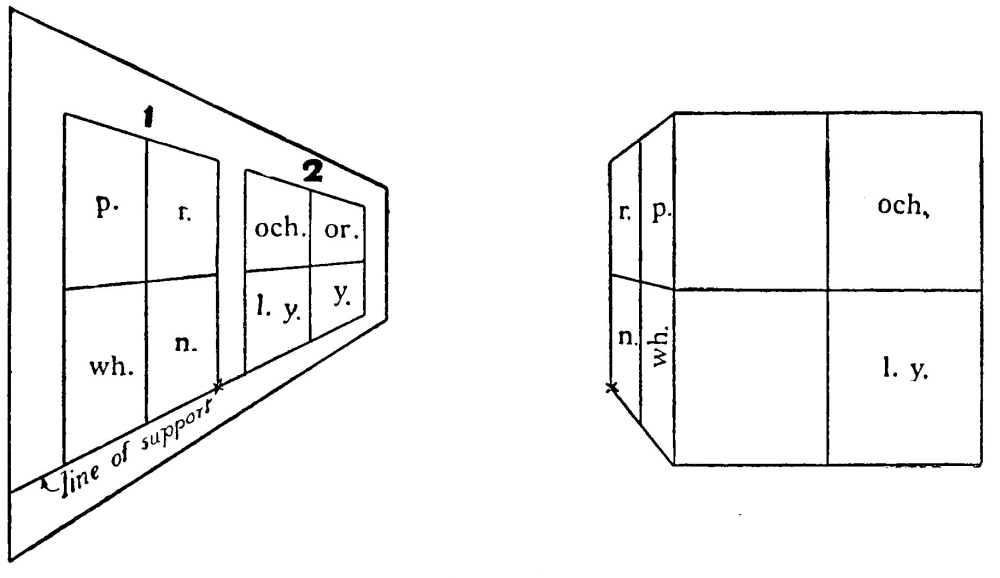
The cube swung round the red line, so that the white line points towards us.
In fig. 93 the cube is swung round the red line so as to point towards us, and consequently the pink face comes next to the plane. As it passes through there are two varieties of appearance designated by the figures 1 and 2 in the plane. These appearances are named in the figure, and are determined by the order in which the cubes[Pg 154] come in the motion of the whole block through the plane.
In fig. 93, the cube is rotated around the red line to face us, making the pink face align with the plane. As it moves through, there are two different appearances shown by figures 1 and 2 in the plane. These appearances are labeled in the figure and are determined by the sequence in which the cubes[Pg 154] pass through the motion of the entire block across the plane.
With regard to these squares severally, however, different names must be used, determined by their relations in the block.
With respect to these squares individually, though, different names need to be used, based on their relationships within the block.
Thus, in fig. 93, when the cube first rests against the plane the null cube is in contact by its pink face; as the block passes through we get an ochre section of the null cube, but this is better called a yellow section, as it is made by a plane perpendicular to the yellow line. When the null cube has passed through the plane, as it is leaving it, we get again a pink face.
Thus, in fig. 93, when the cube first touches the plane, the null cube makes contact with its pink face; as the block moves through, we get an ochre section of the null cube, but this is better referred to as a yellow section since it's formed by a plane that's perpendicular to the yellow line. When the null cube has passed through the plane and is exiting, we once again see a pink face.

The cube swung round yellow line, with red line running from left to right, and white line running down.
The same series of changes take place with the cube appearances which follow on those of the null cube. In this motion the yellow cube follows on the null cube, and the square marked yellow in 2 in the plane will be first “yellow pink face,” then “yellow yellow section,” then “yellow pink face.”
The same series of changes happen with the cube appearances that follow the null cube. In this motion, the yellow cube comes after the null cube, and the square marked yellow in 2 on the plane will first be “yellow pink face,” then “yellow yellow section,” and finally “yellow pink face.”
In fig. 94, in which the cube is turned about the yellow line, we have a certain difficulty, for the plane being will[Pg 155] find that the position his squares are to be placed in will lie below that which they first occupied. They will come where the support was on which he stood his first set of squares. He will get over this difficulty by moving his support.
In fig. 94, where the cube spins around the yellow line, we encounter a challenge. The current plane will[Pg 155] find that the position for placing his squares will be lower than their original spots. They will end up where the support was for his first set of squares. He will overcome this issue by adjusting his support.
Then, since the cubes come upon his plane by the light yellow face, he will have, taking the null cube as before for an example, null, light yellow face; null, red section, because the section is perpendicular to the red line; and finally, as the null cube leaves the plane, null, light yellow face. Then, in this case red following on null, he will have the same series of views of the red as he had of the null cube.
Then, since the cubes appear on his plane with the light yellow face up, he will have, using the null cube as before as an example, null, light yellow face; null, red section, because the section is perpendicular to the red line; and finally, as the null cube exits the plane, null, light yellow face. In this scenario, with red following the null, he will have the same series of views of the red as he had of the null cube.

There is another set of considerations which we will briefly allude to.
There are a few other things we’ll briefly mention.
Suppose there is a hollow cube, and a string is stretched across it from null to null, r, y, wh, as we may call the far diagonal point, how will this string appear to the plane being as the cube moves transverse to his plane?
Suppose there's a hollow cube, and a string is stretched across it from one corner to the opposite corner, r, y, wh, which we can call the far diagonal point. How will this string look to the plane as the cube moves sideways relative to it?
Let us represent the cube as a number of sections, say 5, corresponding to 4 equal divisions made along the white line perpendicular to it.
Let’s represent the cube as several sections, say 5, corresponding to 4 equal divisions made along the white line that goes straight across it.
We number these sections 0, 1, 2, 3, 4, corresponding to the distances along the white line at which they are[Pg 156] taken, and imagine each section to come in successively, taking the place of the preceding one.
We label these sections 0, 1, 2, 3, 4, based on the distances along the white line where they are[Pg 156] captured, and envision each section coming in one after another, replacing the one before it.
These sections appear to the plane being, counting from the first, to exactly coincide each with the preceding one. But the section of the string occupies a different place in each to that which it does in the preceding section. The section of the string appears in the position marked by the dots. Hence the slant of the string appears as a motion in the frame work marked out by the cube sides. If we suppose the motion of the cube not to be recognised, then the string appears to the plane being as a moving point. Hence extension on the unknown dimension appears as duration. Extension sloping in the unknown direction appears as continuous movement.
These sections seem to line up perfectly with each other, starting from the first one. But the position of the string's section is different in each compared to the previous one. The string's section is shown in the spots marked by the dots. So, the angle of the string looks like it’s moving within the framework outlined by the sides of the cube. If we assume that the movement of the cube isn’t noticed, then the string looks like a moving point to the observer. Therefore, extension in the unknown dimension seems like duration. Extension sloping in that unknown direction appears as ongoing movement.
[Pg 157]
[Pg 157]
CHAPTER XII
THE SIMPLEST FOUR-DIMENSIONAL SOLID
A plane being, in learning to apprehend solid existence, must first of all realise that there is a sense of direction altogether wanting to him. That which we call right and left does not exist in his perception. He must assume a movement in a direction, and a distinction of positive and negative in that direction, which has no reality corresponding to it in the movements he can make. This direction, this new dimension, he can only make sensible to himself by bringing in time, and supposing that changes, which take place in time, are due to objects of a definite configuration in three dimensions passing transverse to his plane, and the different sections of it being apprehended as changes of one and the same plane figure.
A being existing on a flat plane, to understand solid existence, must first realize that they completely lack a sense of direction. What we refer to as right and left doesn’t exist in their perception. They have to assume a movement in a certain direction and a distinction between positive and negative in that direction, which doesn’t actually correspond to any of the movements they can make. This direction, this new dimension, can only be made clear to them by introducing time and assuming that changes happening over time are because objects with a specific shape in three dimensions are moving across their plane, with the different sections perceived as changes in one and the same flat figure.
He must also acquire a distinct notion about his plane world, he must no longer believe that it is the all of space, but that space extends on both sides of it. In order, then, to prevent his moving off in this unknown direction, he must assume a sheet, an extended solid sheet, in two dimensions, against which, in contact with which, all his movements take place.
He also needs to develop a clear understanding of his own world; he can’t keep thinking that it’s the entirety of space but recognize that space stretches beyond it in both directions. To avoid wandering off into this unknown area, he must imagine a flat, two-dimensional surface that acts as a boundary, with all his movements occurring in relation to it.
When we come to think of a four-dimensional solid, what are the corresponding assumptions which we must make?
When we consider a four-dimensional solid, what assumptions do we need to make?
We must suppose a sense which we have not, a sense[Pg 158] of direction wanting in us, something which a being in a four-dimensional world has, and which we have not. It is a sense corresponding to a new space direction, a direction which extends positively and negatively from every point of our space, and which goes right away from any space direction we know of. The perpendicular to a plane is perpendicular, not only to two lines in it, but to every line, and so we must conceive this fourth dimension as running perpendicularly to each and every line we can draw in our space.
We have to assume a sense that we lack, a sense[Pg 158] of direction that is missing in us, something that a being in a four-dimensional world possesses and we do not. It’s a sense that relates to a new spatial direction, one that extends positively and negatively from every point in our space, and goes straight away from any direction we are familiar with. The perpendicular to a plane is perpendicular not just to two lines within it, but to every line, and so we need to imagine this fourth dimension as running perpendicularly to every single line we can draw in our space.
And as the plane being had to suppose something which prevented his moving off in the third, the unknown dimension to him, so we have to suppose something which prevents us moving off in the direction unknown to us. This something, since we must be in contact with it in every one of our movements, must not be a plane surface, but a solid; it must be a solid, which in every one of our movements we are against, not in. It must be supposed as stretching out in every space dimension that we know; but we are not in it, we are against it, we are next to it, in the fourth dimension.
And just as the plane had to imagine something that stopped it from moving off in the third dimension, a dimension unknown to it, we too have to imagine something that prevents us from moving into a direction unknown to us. This something, since we encounter it with every movement we make, can't be a flat surface, but must be a solid; it needs to be a solid that we push against with every movement, not one that we are inside. It should extend in every space dimension that we know, but we aren’t inside it; we are pushing against it, existing next to it, in the fourth dimension.
That is, as the plane being conceives himself as having a very small thickness in the third dimension, of which he is not aware in his sense experience, so we must suppose ourselves as having a very small thickness in the fourth dimension, and, being thus four-dimensional beings, to be prevented from realising that we are such beings by a constraint which keeps us always in contact with a vast solid sheet, which stretches on in every direction. We are against that sheet, so that, if we had the power of four-dimensional movement, we should either go away from it or through it; all our space movements as we know them being such that, performing them, we keep in contact with this solid sheet.
That is, just as the plane being sees itself as having a very small thickness in the third dimension, which it isn’t aware of in its sensory experience, we must consider ourselves as having a very small thickness in the fourth dimension. As four-dimensional beings, we are unable to realize this because we are constrained by a force that keeps us always in contact with a vast solid surface that extends in every direction. We are pressed against that surface, so if we had the ability to move in four dimensions, we would either move away from it or go through it; all our spatial movements as we know them require us to remain in contact with this solid surface.
Now consider the exposition a plane being would make[Pg 159] for himself as to the question of the enclosure of a square, and of a cube.
Now think about the explanation a being in a plane would give
[Pg 159] for themselves regarding the concept of enclosing a square and a cube.
He would say the square A, in Fig. 96, is completely enclosed by the four squares, A far, A near, A above, A below, or as they are written An, Af, Aa, Ab.
He would say the square A, in Fig. 96, is completely enclosed by the four squares, A far, A near, A above, A below, or as they're labeled An, Af, Aa, Ab.

If now he conceives the square A to move in the, to him, unknown dimension it will trace out a cube, and the bounding squares will form cubes. Will these completely surround the cube generated by A? No; there will be two faces of the cube made by A left uncovered; the first, that face which coincides with the square A in its first position; the next, that which coincides with the square A in its final position. Against these two faces cubes must be placed in order to completely enclose the cube A. These may be called the cubes left and right or Al and Ar. Thus each of the enclosing squares of the square A becomes a cube and two more cubes are wanted to enclose the cube formed by the movement of A in the third dimension.
If he now imagines the square A moving in a dimension that is unknown to him, it will outline a cube, and the surrounding squares will create cubes. Will these completely encase the cube generated by A? No; there will be two faces of the cube created by A that remain exposed: the first, the face that aligns with square A in its initial position; and the second, the face that aligns with square A in its final position. To fully enclose the cube A, additional cubes must be positioned against these two faces. These can be referred to as the cubes left and right, or Al and Ar. Thus, each of the surrounding squares of square A turns into a cube, and two more cubes are needed to completely encase the cube formed by the movement of A in the third dimension.

The plane being could not see the square A with the squares An, Af, etc., placed about it, because they completely hide it from view; and so we, in the analogous case in our three-dimensional world, cannot see a cube A surrounded by six other cubes. These cubes we will call A near An, A far Af, A above Aa, A below Ab, A left Al, A right Ar, shown in fig. 97. If now the cube A moves in the fourth dimension right out of space, it traces out a higher cube—a tesseract, as it may be called.[Pg 160] Each of the six surrounding cubes carried on in the same motion will make a tesseract also, and these will be grouped around the tesseract formed by A. But will they enclose it completely?
The plane can't see the square A because the surrounding squares An, Af, and others completely block its view. Similarly, in our three-dimensional space, we can't see a cube A that is surrounded by six other cubes. We'll call these cubes A near An, A far Af, A above Aa, A below Ab, A left Al, and A right Ar, as shown in fig. 97. If the cube A moves in the fourth dimension, exiting our space, it outlines a higher cube—a tesseract, as it's called.[Pg 160] Each of the six surrounding cubes that move in the same way will also form a tesseract, which will be arranged around the tesseract created by A. But will they completely enclose it?
All the cubes An, Af, etc., lie in our space. But there is nothing between the cube A and that solid sheet in contact with which every particle of matter is. When the cube A moves in the fourth direction it starts from its position, say Ak, and ends in a final position An (using the words “ana” and “kata” for up and down in the fourth dimension). Now the movement in this fourth dimension is not bounded by any of the cubes An, Af, nor by what they form when thus moved. The tesseract which A becomes is bounded in the positive and negative ways in this new direction by the first position of A and the last position of A. Or, if we ask how many tesseracts lie around the tesseract which A forms, there are eight, of which one meets it by the cube A, and another meets it by a cube like A at the end of its motion.
All the cubes An, Af, etc., exist in our space. But there’s nothing between the cube A and that solid sheet with which every particle of matter is in contact. When the cube A moves in the fourth direction, it starts from its position, let’s say Ak, and ends in a final position An (using the terms “ana” and “kata” for up and down in the fourth dimension). Now, the movement in this fourth dimension isn’t limited by any of the cubes An, Af, nor by what they form when moved in that way. The tesseract that A becomes is bounded in the positive and negative directions in this new dimension by the initial position of A and the final position of A. Or, if we ask how many tesseracts are surrounding the tesseract that A forms, there are eight, with one interacting with it through the cube A, and another interacting with it through a cube like A at the end of its motion.
We come here to a very curious thing. The whole solid cube A is to be looked on merely as a boundary of the tesseract.
We arrive at something quite interesting. The entire solid cube A should be seen simply as a boundary of the tesseract.
Yet this is exactly analogous to what the plane being would come to in his study of the solid world. The square A (fig. 96), which the plane being looks on as a solid existence in his plane world, is merely the boundary of the cube which he supposes generated by its motion.
Yet this is exactly similar to what the plane being would discover in his examination of the solid world. The square A (fig. 96), which the plane being sees as a solid existence in his plane world, is only the boundary of the cube that he imagines is created by its movement.
The fact is that we have to recognise that, if there is another dimension of space, our present idea of a solid body, as one which has three dimensions only, does not correspond to anything real, but is the abstract idea of a three-dimensional boundary limiting a four-dimensional solid, which a four-dimensional being would form. The plane being’s thought of a square is not the thought of what we should call a possibly existing real square,[Pg 161] but the thought of an abstract boundary, the face of a cube.
The truth is, we need to acknowledge that if there’s another dimension of space, our current concept of a solid object, which we think of as having only three dimensions, doesn’t actually match up with anything real. Instead, it’s just an abstract idea of a three-dimensional boundary that limits a four-dimensional solid, which a four-dimensional being would form. The way a two-dimensional being thinks about a square isn’t the same as what we would consider a potentially real square,[Pg 161] but rather the thought of an abstract boundary, like the face of a cube.
Let us now take our eight coloured cubes, which form a cube in space, and ask what additions we must make to them to represent the simplest collection of four-dimensional bodies—namely, a group of them of the same extent in every direction. In plane space we have four squares. In solid space we have eight cubes. So we should expect in four-dimensional space to have sixteen four-dimensional bodies-bodies which in four-dimensional space correspond to cubes in three-dimensional space, and these bodies we call tesseracts.
Let’s take our eight colored cubes, which make up a cube in space, and figure out what we need to add to represent the simplest set of four-dimensional shapes—specifically, a group of them that have the same size in every direction. In two-dimensional space, we have four squares. In three-dimensional space, we have eight cubes. So, we should expect to have sixteen four-dimensional shapes in four-dimensional space—shapes that correspond to cubes in three-dimensional space, which we call tesseracts.

Given then the null, white, red, yellow cubes, and those which make up the block, we notice that we represent perfectly well the extension in three directions (fig. 98). From the null point of the null cube, travelling one inch, we come to the white cube; travelling one inch away we come to the yellow cube; travelling one inch up we come to the red cube. Now, if there is a fourth dimension, then travelling from the same null point for one inch in that direction, we must come to the body lying beyond the null region.
Given the null, white, red, and yellow cubes, along with those that make up the block, we can see that we accurately represent extension in three directions (fig. 98). Starting from the null point of the null cube, if we move one inch, we reach the white cube; another inch away, we arrive at the yellow cube; moving one inch up, we reach the red cube. Now, if there is a fourth dimension, then moving from the same null point for one inch in that direction would take us to the body lying beyond the null region.
I say null region, not cube; for with the introduction of the fourth dimension each of our cubes must become something different from cubes. If they are to have existence in the fourth dimension, they must be “filled up from” in this fourth dimension.
I call it a null region, not a cube; because with the addition of the fourth dimension, each of our cubes has to transform into something other than cubes. If they are to exist in the fourth dimension, they must be "filled up from" in this fourth dimension.
Now we will assume that as we get a transference from null to white going in one way, from null to yellow going in another, so going from null in the fourth direction we have a transference from null to blue, using thus the[Pg 162] colours white, yellow, red, blue, to denote transferences in each of the four directions—right, away, up, unknown or fourth dimension.
Now we'll assume that as we move from null to white in one direction, and from null to yellow in another, moving from null in the fourth direction means we're transferring from null to blue. We're using the colors white, yellow, red, and blue to indicate transfers in each of the four directions—right, away, up, and unknown or the fourth dimension.[Pg 162]
A plane being’s representation of a block of eight cubes by two sets of four squares.
Hence, as the plane being must represent the solid regions, he would come to by going right, as four squares lying in some position in his plane, arbitrarily chosen, side by side with his original four squares, so we must represent those eight four-dimensional regions, which we should come to by going in the fourth dimension from each of our eight cubes, by eight cubes placed in some arbitrary position relative to our first eight cubes.
Hence, as the plane being must represent the solid regions, he would arrive there by moving right, with four squares arranged in some position in his plane, randomly chosen, side by side with his original four squares. Therefore, we need to represent those eight four-dimensional regions, which we would reach by moving in the fourth dimension from each of our eight cubes, as eight cubes placed in some random position relative to our first eight cubes.

Our representation of a block of sixteen tesseracts by two blocks of eight cubes.[3]
Our representation of a group of sixteen tesseracts using two groups of eight cubes.[3]
Hence, of the two sets of eight cubes, each one will serve[Pg 163] us as a representation of one of the sixteen tesseracts which form one single block in four-dimensional space. Each cube, as we have it, is a tray, as it were, against which the real four-dimensional figure rests—just as each of the squares which the plane being has is a tray, so to speak, against which the cube it represents could rest.
Hence, of the two sets of eight cubes, each one will serve[Pg 163] as a representation of one of the sixteen tesseracts that make up a single block in four-dimensional space. Each cube we have is like a tray, supporting the actual four-dimensional figure—similar to how each of the squares that the plane being has acts as a tray against which the cube it represents could rest.
If we suppose the cubes to be one inch each way, then the original eight cubes will give eight tesseracts of the same colours, or the cubes, extending each one inch in the fourth dimension.
If we assume the cubes are one inch in every direction, then the original eight cubes will create eight tesseracts of the same colors, with each cube extending one inch into the fourth dimension.
But after these there come, going on in the fourth dimension, eight other bodies, eight other tesseracts. These must be there, if we suppose the four-dimensional body we make up to have two divisions, one inch each in each of four directions.
But after these, there are eight other bodies, eight other tesseracts, existing in the fourth dimension. These must be present if we assume the four-dimensional body we've constructed divides into two sections, one inch each in four different directions.
The colour we choose to designate the transference to this second region in the fourth dimension is blue. Thus, starting from the null cube and going in the fourth dimension, we first go through one inch of the null tesseract, then we come to a blue cube, which is the beginning of a blue tesseract. This blue tesseract stretches one inch farther on in the fourth dimension.
The color we choose to represent the transition to this second area in the fourth dimension is blue. So, starting from the empty cube and moving into the fourth dimension, we first traverse one inch of the empty tesseract, then we reach a blue cube, which marks the start of a blue tesseract. This blue tesseract extends one inch further into the fourth dimension.
Thus, beyond each of the eight tesseracts, which are of the same colour as the cubes which are their bases, lie eight tesseracts whose colours are derived from the colours of the first eight by adding blue. Thus—
Thus, beyond each of the eight tesseracts, which are the same color as the cubes they are based on, lie eight tesseracts whose colors come from the first eight by adding blue. Thus—
| Null | gives | blue |
| Yellow | ” | green |
| Red | ” | purple |
| Orange | ” | brown |
| White | ” | light blue |
| Pink | ” | light purple |
| Light yellow | ” | light green |
| Ochre | ” | light brown |
The addition of blue to yellow gives green—this is a[Pg 164] natural supposition to make. It is also natural to suppose that blue added to red makes purple. Orange and blue can be made to give a brown, by using certain shades and proportions. And ochre and blue can be made to give a light brown.
The addition of blue to yellow creates green—this is a[Pg 164] logical assumption to make. It’s also reasonable to assume that blue mixed with red results in purple. By using specific shades and proportions, orange and blue can come together to produce brown. Similarly, ochre and blue can mix to create a light brown.
But the scheme of colours is merely used for getting a definite and realisable set of names and distinctions visible to the eye. Their naturalness is apparent to any one in the habit of using colours, and may be assumed to be justifiable, as the sole purpose is to devise a set of names which are easy to remember, and which will give us a set of colours by which diagrams may be made easy of comprehension. No scientific classification of colours has been attempted.
But the color scheme is simply used to create a clear and understandable set of names and distinctions that are visible to the eye. Their naturalness is obvious to anyone who frequently uses colors and can be seen as justified, since the main goal is to come up with a set of names that are easy to remember and that provide us with a range of colors for making diagrams easier to understand. No scientific classification of colors has been attempted.
Starting, then, with these sixteen colour names, we have a catalogue of the sixteen tesseracts, which form a four-dimensional block analogous to the cubic block. But the cube which we can put in space and look at is not one of the constituent tesseracts; it is merely the beginning, the solid face, the side, the aspect, of a tesseract.
Starting with these sixteen color names, we have a list of the sixteen tesseracts, which create a four-dimensional block similar to a cube. However, the cube we can place in space and observe isn’t one of the actual tesseracts; it’s just the starting point, the solid face, the side, the appearance of a tesseract.
We will now proceed to derive a name for each region, point, edge, plane face, solid and a face of the tesseract.
We will now go ahead and create a name for each region, point, edge, plane face, solid, and face of the tesseract.
The system will be clear, if we look at a representation in the plane of a tesseract with three, and one with four divisions in its side.
The system will be clear if we look at a representation of a tesseract in the plane with three and one with four divisions on its side.
The tesseract made up of three tesseracts each way corresponds to the cube made up of three cubes each way, and will give us a complete nomenclature.
The tesseract made of three tesseracts in each direction corresponds to the cube made of three cubes in each direction, and will provide us with a complete naming system.
In this diagram, fig. 101, 1 represents a cube of 27 cubes, each of which is the beginning of a tesseract. These cubes are represented simply by their lowest squares, the solid content must be understood. 2 represents the 27 cubes which are the beginnings of the 27 tesseracts one inch on in the fourth dimension. These tesseracts are represented as a block of cubes put side by side with[Pg 165] the first block, but in their proper positions they could not be in space with the first set. 3 represents 27 cubes (forming a larger cube) which are the beginnings of the tesseracts, which begin two inches in the fourth direction from our space and continue another inch.
In this diagram, fig. 101, 1 shows a cube made up of 27 smaller cubes, each representing the start of a tesseract. These cubes are simply shown by their bottom squares; the solid content needs to be understood. 2 shows the 27 cubes that are the beginnings of the 27 tesseracts one inch into the fourth dimension. These tesseracts are depicted as a row of cubes lined up next to the first block, but in reality, they wouldn't be positioned in the same space as the first set. 3 shows 27 cubes (forming a larger cube) that are the beginnings of the tesseracts, which start two inches in the fourth direction from our space and extend another inch. [Pg 165]

| 1 | 2 | 3 |
| Each cube is the beginning of the first tesseract going in the fourth dimension. | Each cube is the beginning of the second tesseract. | Each cube is the beginning of the third tesseract. |
[Pg 166]
[Pg 166]

| 1 | 2 | 3 | 4 |
| A cube of 64 cubes each 1. in × 1 in., the beginning of a tesseract. | A cube of 64 cubes, each 1 in. × 1 in. × 1 in. the beginning of tesseracts 1 in. from our space in the 4th dimension. | A cube of 64 cubes, each 1 in. × 1 in. × 1 in. the beginning of tesseracts 2 in. from our space in the 4th dimension. | A cube of 64 cubes, each 1 in. × 1 in. × 1 in. the beginning of tesseracts 3 in. from our space in the 4th dimension. |
In fig. 102, we have the representation of a block of 4 × 4 × 4 × 4 or 256 tesseracts. They are given in four consecutive sections, each supposed to be taken one inch apart in the fourth dimension, and so giving four[Pg 167] blocks of cubes, 64 in each block. Here we see, comparing it with the figure of 81 tesseracts, that the number of the different regions show a different tendency of increase. By taking five blocks of five divisions each way this would become even more clear.
In fig. 102, we have a representation of a block of 4 × 4 × 4 × 4, or 256 tesseracts. They are arranged in four consecutive sections, each intended to be spaced one inch apart in the fourth dimension, resulting in four[Pg 167] blocks of cubes, with 64 cubes in each block. Here, when we compare it to the figure of 81 tesseracts, we see that the number of different regions shows a different trend in increase. If we take five blocks of five divisions in each direction, this would become even clearer.
We see, fig. 102, that starting from the point at any corner, the white coloured regions only extend out in a line. The same is true for the yellow, red, and blue. With regard to the latter it should be noticed that the line of blues does not consist in regions next to each other in the drawing, but in portions which come in in different cubes. The portions which lie next to one another in the fourth dimension must always be represented so, when we have a three-dimensional representation. Again, those regions such as the pink one, go on increasing in two dimensions. About the pink region this is seen without going out of the cube itself, the pink regions increase in length and height, but in no other dimension. In examining these regions it is sufficient to take one as a sample.
We can see, fig. 102, that starting from any corner, the white areas only spread out in a line. The same goes for the yellow, red, and blue. It's important to note that the blue line doesn't consist of areas next to each other in the drawing, but in segments that appear in different cubes. The sections that are adjacent in the fourth dimension must always be shown this way when we create a three-dimensional representation. Additionally, regions like the pink one continue to expand in two dimensions. For the pink region, this is evident without leaving the cube itself; the pink areas increase in length and height, but in no other dimension. When examining these areas, it suffices to take one as a sample.
The purple increases in the same manner, for it comes in in a succession from below to above in block 2, and in a succession from block to block in 2 and 3. Now, a succession from below to above represents a continuous extension upwards, and a succession from block to block represents a continuous extension in the fourth dimension. Thus the purple regions increase in two dimensions, the upward and the fourth, so when we take a very great many divisions, and let each become very small, the purple region forms a two-dimensional extension.
The purple increases in the same way, as it comes in a sequence from bottom to top in block 2, and in a sequence from block to block in blocks 2 and 3. A sequence from bottom to top represents a continuous upward extension, while a sequence from block to block represents a continuous extension in the fourth dimension. Therefore, the purple regions increase in two dimensions—the upward direction and the fourth dimension. So, when we take a large number of divisions and make each one very small, the purple region creates a two-dimensional extension.
In the same way, looking at the regions marked l. b. or light blue, which starts nearest a corner, we see that the tesseracts occupying it increase in length from left to right, forming a line, and that there are as many lines of light blue tesseracts as there are sections between the[Pg 168] first and last section. Hence the light blue tesseracts increase in number in two ways—in the right and left, and in the fourth dimension. They ultimately form what we may call a plane surface.
In the same way, looking at the regions marked l. b. or light blue, which starts nearest a corner, we see that the tesseracts in that area increase in length from left to right, creating a line. There are as many lines of light blue tesseracts as there are sections between the[Pg 168] first and last section. So, the light blue tesseracts increase in number in two ways—horizontally and in the fourth dimension. They ultimately create what we can call a plane surface.
Now all those regions which contain a mixture of two simple colours, white, yellow, red, blue, increase in two ways. On the other hand, those which contain a mixture of three colours increase in three ways. Take, for instance, the ochre region; this has three colours, white, yellow, red; and in the cube itself it increases in three ways.
Now all the areas that have a mix of two basic colors—white, yellow, red, blue—increase in two ways. In contrast, those areas with a mix of three colors increase in three ways. For example, the ochre area has three colors: white, yellow, and red; and within the cube itself, it increases in three ways.
Now regard the orange region; if we add blue to this we get a brown. The region of the brown tesseracts extends in two ways on the left of the second block, No. 2 in the figure. It extends also from left to right in succession from one section to another, from section 2 to section 3 in our figure.
Now look at the orange area; if we add blue to it, we get brown. The area of the brown tesseracts stretches in two directions on the left side of the second block, No. 2 in the figure. It also extends from left to right in sequence from one section to another, from section 2 to section 3 in our figure.
Hence the brown tesseracts increase in number in three dimensions upwards, to and fro, fourth dimension. Hence they form a cubic, a three-dimensional region; this region extends up and down, near and far, and in the fourth direction, but is thin in the direction from left to right. It is a cube which, when the complete tesseract is represented in our space, appears as a series of faces on the successive cubic sections of the tesseract. Compare fig. 103 in which the middle block, 2, stands as representing a great number of sections intermediate between 1 and 3.
Hence, the brown tesseracts multiply in three dimensions, moving up and down, as well as in the fourth dimension. This creates a cube, a three-dimensional space; this space extends vertically, horizontally, and in the fourth direction, but is narrow from left to right. It is a cube that, when the entire tesseract is shown in our space, looks like a series of faces on the successive cubic sections of the tesseract. Compare fig. 103, where the middle block, 2, represents many sections that are between 1 and 3.
In a similar way from the pink region by addition of blue we have the light purple region, which can be seen to increase in three ways as the number of divisions becomes greater. The three ways in which this region of tesseracts extends is up and down, right and left, fourth dimension. Finally, therefore, it forms a cubic mass of very small tesseracts, and when the tesseract is given in space sections it appears on the faces containing the upward and the right and left dimensions.
In a similar way, by adding blue to the pink area, we create the light purple area, which can be observed to expand in three ways as the number of divisions increases. The three ways this area of tesseracts grows are up and down, right and left, and in the fourth dimension. Ultimately, it forms a cubic mass of very small tesseracts, and when the tesseract is represented in space sections, it appears on the faces that contain the upward and the right and left dimensions.
[Pg 169]
[Pg 169]
We get then altogether, as three-dimensional regions, ochre, brown, light purple, light green.
We come together as three-dimensional areas, ochre, brown, light purple, light green.
Finally, there is the region which corresponds to a mixture of all the colours; there is only one region such as this. It is the one that springs from ochre by the addition of blue—this colour we call light brown.
Finally, there’s the area that represents a mix of all colors; there’s only one area like this. It comes from ochre when you add blue—this color is what we refer to as light brown.
Looking at the light brown region we see that it increases in four ways. Hence, the tesseracts of which it is composed increase in number in each of four dimensions, and the shape they form does not remain thin in any of the four dimensions. Consequently this region becomes the solid content of the block of tesseracts, itself; it is the real four-dimensional solid. All the other regions are then boundaries of this light brown region. If we suppose the process of increasing the number of tesseracts and diminishing their size carried on indefinitely, then the light brown coloured tesseracts become the whole interior mass, the three-coloured tesseracts become three-dimensional boundaries, thin in one dimension, and form the ochre, the brown, the light purple, the light green. The two-coloured tesseracts become two-dimensional boundaries, thin in two dimensions, e.g., the pink, the green, the purple, the orange, the light blue, the light yellow. The one-coloured tesseracts become bounding lines, thin in three dimensions, and the null points become bounding corners, thin in four dimensions. From these thin real boundaries we can pass in thought to the abstractions—points, lines, faces, solids—bounding the four-dimensional solid, which in this case is light brown coloured, and under this supposition the light brown coloured region is the only real one, is the only one which is not an abstraction.
Looking at the light brown area, we see that it increases in four ways. This means that the tesseracts it’s made of increase in number in each of the four dimensions, and the shape they create doesn’t stay thin in any of those dimensions. As a result, this area becomes the solid content of the block of tesseracts; it is the actual four-dimensional solid. All the other areas are then boundaries of this light brown region. If we imagine that the process of increasing the number of tesseracts and decreasing their size continues indefinitely, then the light brown tesseracts fill the entire inner mass, while the three-colored tesseracts form three-dimensional boundaries, thin in one dimension, representing the ochre, brown, light purple, and light green. The two-colored tesseracts become two-dimensional boundaries, thin in two dimensions (e.g., the pink, green, purple, orange, light blue, and light yellow). The one-colored tesseracts become boundary lines, thin in three dimensions, and the null points become boundary corners, thin in four dimensions. From these thin real boundaries, we can think about the abstractions—points, lines, faces, solids—that bound the four-dimensional solid, which in this case is light brown, and under this assumption, the light brown area is the only real one, the only one that isn’t an abstraction.
It should be observed that, in taking a square as the representation of a cube on a plane, we only represent one face, or the section between two faces. The squares,[Pg 170] as drawn by a plane being, are not the cubes themselves, but represent the faces or the sections of a cube. Thus in the plane being’s diagram a cube of twenty-seven cubes “null” represents a cube, but is really, in the normal position, the orange square of a null cube, and may be called null, orange square.
It should be noted that when we use a square to represent a cube on a flat surface, we are only showing one face or the area between two faces. The squares, [Pg 170] as drawn by a flat being, are not the cubes themselves; they represent the faces or the sections of a cube. Therefore, in the flat being's diagram, a cube made up of twenty-seven “null” cubes represents a cube, but actually, in the standard position, it's the orange square of a null cube, which can be referred to as null, orange square.
A plane being would save himself confusion if he named his representative squares, not by using the names of the cubes simply, but by adding to the names of the cubes a word to show what part of a cube his representative square was.
A being in a plane would avoid confusion if he named his representative squares not just by using the names of the cubes, but by adding a word to indicate what part of a cube his representative square was.
Thus a cube null standing against his plane touches it by null orange face, passing through his plane it has in the plane a square as trace, which is null white section, if we use the phrase white section to mean a section drawn perpendicular to the white line. In the same way the cubes which we take as representative of the tesseract are not the tesseract itself, but definite faces or sections of it. In the preceding figures we should say then, not null, but “null tesseract ochre cube,” because the cube we actually have is the one determined by the three axes, white, red, yellow.
Thus, a cube that is null and positioned against his plane touches it with a null orange face. As it passes through the plane, it leaves a square trace, which is a null white section, if we use the term white section to refer to a section drawn perpendicular to the white line. Similarly, the cubes we consider as representative of the tesseract are not the tesseract itself, but rather specific faces or sections of it. In the previous figures, we should refer to it as "null tesseract ochre cube," because the cube we actually have is determined by the three axes: white, red, and yellow.
There is another way in which we can regard the colour nomenclature of the boundaries of a tesseract.
There’s another way we can look at the color names used for the boundaries of a tesseract.
Consider a null point to move tracing out a white line one inch in length, and terminating in a null point, see fig. 103 or in the coloured plate.
Consider a null point that moves, drawing a white line one inch long, and ending at a null point. See fig. 103 or in the colored plate.
Then consider this white line with its terminal points itself to move in a second dimension, each of the points traces out a line, the line itself traces out an area, and gives two lines as well, its initial and its final position.
Then think about this white line with its endpoints; it moves in a second dimension, where each of the points outlines a line, the line itself creates an area, and provides two lines as well, its starting and ending positions.
Thus, if we call “a region” any element of the figure, such as a point, or a line, etc., every “region” in moving traces out a new kind of region, “a higher region,” and gives two regions of its own kind, an initial and a final[Pg 171] position. The “higher region” means a region with another dimension in it.
Thus, if we refer to “a region” as any part of the figure, like a point or a line, etc., every “region” in motion creates a new type of region, called “a higher region,” and defines two regions of its kind: an initial and a final position. The “higher region” signifies a region that includes an additional dimension. [Pg 171]
Now the square can move and generate a cube. The square light yellow moves and traces out the mass of the cube. Letting the addition of red denote the region made by the motion in the upward direction we get an ochre solid. The light yellow face in its initial and terminal positions give the two square boundaries of the cube above and below. Then each of the four lines of the light yellow square—white, yellow, and the white, yellow opposite them—trace out a bounding square. So there are in all six bounding squares, four of these squares being designated in colour by adding red to the colour of the generating lines. Finally, each point moving in the up direction gives rise to a line coloured null + red, or red, and then there are the initial and terminal positions of the points giving eight points. The number of the lines is evidently twelve, for the four lines of this light yellow square give four lines in their initial, four lines in their final position, while the four points trace out four lines, that is altogether twelve lines.
Now the square can move and create a cube. The light yellow square moves and outlines the shape of the cube. Adding red indicates the area created by the upward motion, resulting in an ochre solid. The light yellow face in its starting and ending positions marks the two square boundaries of the cube, one above and one below. Each of the four sides of the light yellow square—white, yellow, and their opposites—forms a bounding square. In total, there are six bounding squares, with four of them highlighted in color by adding red to the color of the generating lines. Finally, each point moving upward creates a line that is either colorless + red, or red, and then we account for the starting and ending positions of the points, resulting in eight points. The total number of lines is clearly twelve, as the four lines of the light yellow square account for four lines in the initial position and four in the final position, while the four points trace out four lines, bringing the total to twelve lines.
Now the squares are each of them separate boundaries of the cube, while the lines belong, each of them, to two squares, thus the red line is that which is common to the orange and pink squares.
Now the squares are each separate boundaries of the cube, while the lines belong to two squares each; the red line is common to both the orange and pink squares.
Now suppose that there is a direction, the fourth dimension, which is perpendicular alike to every one of the space dimensions already used—a dimension perpendicular, for instance, to up and to right hand, so that the pink square moving in this direction traces out a cube.
Now imagine there’s a direction, the fourth dimension, that’s perpendicular to all the space dimensions we've already used—a dimension that's perpendicular, for example, to up and to the right, so that the pink square moving in this direction creates a cube.
A dimension, moreover, perpendicular to the up and away directions, so that the orange square moving in this direction also traces out a cube, and the light yellow square, too, moving in this direction traces out a cube.[Pg 172] Under this supposition, the whole cube moving in the unknown dimension, traces out something new—a new kind of volume, a higher volume. This higher volume is a four-dimensional volume, and we designate it in colour by adding blue to the colour of that which by moving generates it.
A direction that's also at a right angle to the up and out movements means that the orange square moving in this way will trace out a cube, and the light yellow square will also trace out a cube as it moves in the same way.[Pg 172] Based on this idea, the entire cube moving in this unknown direction creates something new—a new type of volume, a higher volume. This higher volume is four-dimensional, and we represent it visually by adding blue to the color of the object that generates it through its movement.
It is generated by the motion of the ochre solid, and hence it is of the colour we call light brown (white, yellow, red, blue, mixed together). It is represented by a number of sections like 2 in fig. 103.
It comes from the movement of the ochre solid, which gives it the color we refer to as light brown (white, yellow, red, blue, all mixed together). It's shown through a number of sections like 2 in fig. 103.
Now this light brown higher solid has for boundaries: first, the ochre cube in its initial position, second, the same cube in its final position, 1 and 3, fig. 103. Each of the squares which bound the cube, moreover, by movement in this new direction traces out a cube, so we have from the front pink faces of the cube, third, a pink blue or light purple cube, shown as a light purple face on cube 2 in fig. 103, this cube standing for any number of intermediate sections; fourth, a similar cube from the opposite pink face; fifth, a cube traced out by the orange face—this is coloured brown and is represented by the brown face of the section cube in fig. 103; sixth, a corresponding brown cube on the right hand; seventh, a cube starting from the light yellow square below; the unknown dimension is at right angles to this also. This cube is coloured light yellow and blue or light green; and, finally, eighth, a corresponding cube from the upper light yellow face, shown as the light green square at the top of the section cube.
Now, this light brown solid has the following boundaries: first, the ochre cube in its original position; second, the same cube in its final position, 1 and 3, fig. 103. Each of the squares that border the cube also traces out a cube when moved in this new direction, so we have, from the front pink faces of the cube, third, a pink-blue or light purple cube, represented as a light purple face on cube 2 in fig. 103, with this cube symbolizing any number of intermediate sections; fourth, a similar cube from the opposite pink face; fifth, a cube formed by the orange face—this is colored brown and is illustrated by the brown face of the section cube in fig. 103; sixth, a matching brown cube on the right side; seventh, a cube starting from the light yellow square below; the unknown dimension is also at right angles to this. This cube is colored light yellow and blue or light green; and finally, eighth, a corresponding cube from the upper light yellow face, depicted as the light green square at the top of the section cube.
The tesseract has thus eight cubic boundaries. These completely enclose it, so that it would be invisible to a four-dimensional being. Now, as to the other boundaries, just as the cube has squares, lines, points, as boundaries, so the tesseract has cubes, squares, lines, points, as boundaries.
The tesseract has eight cubic boundaries. These fully enclose it, making it invisible to a four-dimensional being. Now, regarding the other boundaries, just like a cube has squares, lines, and points as boundaries, a tesseract has cubes, squares, lines, and points as boundaries.
[Pg 173]
[Pg 173]
The number of squares is found thus—round the cube are six squares, these will give six squares in their initial and six in their final positions. Then each of the twelve lines of the cube trace out a square in the motion in the fourth dimension. Hence there will be altogether 12 + 12 = 24 squares.
The number of squares is determined like this—around the cube, there are six squares, which will yield six squares in their initial positions and six in their final positions. Then, each of the twelve lines of the cube traces out a square as it moves into the fourth dimension. Therefore, there will be a total of 12 + 12 = 24 squares.
If we look at any one of these squares we see that it is the meeting surface of two of the cubic sides. Thus, the red line by its movement in the fourth dimension, traces out a purple square—this is common to two cubes, one of which is traced out by the pink square moving in the fourth dimension, and the other is traced out by the orange square moving in the same way. To take another square, the light yellow one, this is common to the ochre cube and the light green cube. The ochre cube comes from the light yellow square by moving it in the up direction, the light green cube is made from the light yellow square by moving it in the fourth dimension. The number of lines is thirty-two, for the twelve lines of the cube give twelve lines of the tesseract in their initial position, and twelve in their final position, making twenty-four, while each of the eight points traces out a line, thus forming thirty-two lines altogether.
If we look at any of these squares, we can see that it's the meeting point of two of the cubic sides. So, as the red line moves in the fourth dimension, it creates a purple square—this square is shared by two cubes, one of which is created by the pink square moving in the fourth dimension, and the other is made by the orange square moving in the same way. If we take another square, the light yellow one, it's common to the ochre cube and the light green cube. The ochre cube comes from the light yellow square by moving it up, while the light green cube is formed from the light yellow square by moving it in the fourth dimension. The total number of lines is thirty-two, because the twelve lines of the cube provide twelve lines of the tesseract in their initial position, and another twelve in their final position, making twenty-four. Each of the eight points also creates a line, resulting in a total of thirty-two lines.
The lines are each of them common to three cubes, or to three square faces; take, for instance, the red line. This is common to the orange face, the pink face, and that face which is formed by moving the red line in the sixth dimension, namely, the purple face. It is also common to the ochre cube, the pale purple cube, and the brown cube.
The lines are each shared by three cubes or three square faces; for example, the red line. This line connects the orange face, the pink face, and the face created by shifting the red line into the sixth dimension, which is the purple face. It also connects the ochre cube, the pale purple cube, and the brown cube.
The points are common to six square faces and to four cubes; thus, the null point from which we start is common to the three square faces—pink, light yellow, orange, and to the three square faces made by moving the three lines[Pg 174] white, yellow, red, in the fourth dimension, namely, the light blue, the light green, the purple faces—that is, to six faces in all. The four cubes which meet in it are the ochre cube, the light purple cube, the brown cube, and the light green cube.
The points are shared among six square faces and four cubes; so, the starting point we’re using is shared by the three square faces—pink, light yellow, orange—and the three square faces created by moving the three lines—white, yellow, red—in the fourth dimension, specifically the light blue, light green, and purple faces. In total, that makes six faces. The four cubes that converge at this point are the ochre cube, light purple cube, brown cube, and light green cube.[Pg 174]

The tesseract, red, white, yellow axes in space. In the lower line the three rear faces are shown, the interior being removed.]
The tesseract, with its red, white, and yellow axes in space. In the bottom line, the three back faces are displayed, with the interior taken out.
[Pg 175]
[Pg 175]

The tesseract, red, yellow, blue axes in space, the blue axis running to the left, opposite faces are coloured identically.
A complete view of the tesseract in its various space presentations is given in the following figures or catalogue cubes, figs. 103-106. The first cube in each figure[Pg 176] represents the view of a tesseract coloured as described as it begins to pass transverse to our space. The intermediate figure represents a sectional view when it is partly through, and the final figure represents the far end as it is just passing out. These figures will be explained in detail in the next chapter.
A complete view of the tesseract in its different spatial presentations is shown in the following figures or catalog cubes, figs. 103-106. The first cube in each figure[Pg 176] represents the view of a tesseract colored as described, as it starts to move across our space. The middle figure shows a sectional view when it's partly through, and the last figure shows the far end as it is just passing out. These figures will be explained in detail in the next chapter.

The tesseract, with red, white, blue axes in space. Opposite faces are coloured identically.
[Pg 177]
[Pg 177]

The tesseract, with blue, white, yellow axes in space. The blue axis runs downward from the base of the ochre cube as it stands originally. Opposite faces are coloured identically.
We have thus obtained a nomenclature for each of the regions of a tesseract; we can speak of any one of the eight bounding cubes, the twenty square faces, the thirty-two lines, the sixteen points.
We have now created a naming system for each part of a tesseract; we can refer to any of the eight surrounding cubes, the twenty square faces, the thirty-two edges, and the sixteen vertices.
[Pg 178]
[Pg 178]
CHAPTER XIII
REMARKS ON THE FIGURES
An inspection of above figures will give an answer to many questions about the tesseract. If we have a tesseract one inch each way, then it can be represented as a cube—a cube having white, yellow, red axes, and from this cube as a beginning, a volume extending into the fourth dimension. Now suppose the tesseract to pass transverse to our space, the cube of the red, yellow, white axes disappears at once, it is indefinitely thin in the fourth dimension. Its place is occupied by those parts of the tesseract which lie further away from our space in the fourth dimension. Each one of these sections will last only for one moment, but the whole of them will take up some appreciable time in passing. If we take the rate of one inch a minute the sections will take the whole of the minute in their passage across our space, they will take the whole of the minute except the moment which the beginning cube and the end cube occupy in their crossing our space. In each one of the cubes, the section cubes, we can draw lines in all directions except in the direction occupied by the blue line, the fourth dimension; lines in that direction are represented by the transition from one section cube to another. Thus to give ourselves an adequate representation of the tesseract we ought to have a limitless number of section cubes intermediate between the first bounding cube, the[Pg 179] ochre cube, and the last bounding cube, the other ochre cube. Practically three intermediate sectional cubes will be found sufficient for most purposes. We will take then a series of five figures—two terminal cubes, and three intermediate sections—and show how the different regions appear in our space when we take each set of three out of the four axes of the tesseract as lying in our space.
An inspection of the above figures will answer many questions about the tesseract. If we have a tesseract that measures one inch in each direction, it can be represented as a cube—a cube with white, yellow, and red axes. From this cube as a starting point, we can visualize a volume extending into the fourth dimension. Now, if we imagine the tesseract moving across our space, the cube with the red, yellow, and white axes disappears at once; it becomes infinitely thin in the fourth dimension. Its position is taken up by those parts of the tesseract that are further away from our space in the fourth dimension. Each of these sections only lasts for a moment, but the entire process takes a noticeable amount of time to pass through. If we assume a rate of one inch per minute, the sections will take the full minute to cross our space, except for the moment that the starting cube and the ending cube occupy while crossing through. In each of the section cubes, we can draw lines in all directions except along the blue line, which represents the fourth dimension; lines in that direction are shown by the transition from one section cube to another. Therefore, to adequately represent the tesseract, we need an infinite number of section cubes placed between the first bounding cube, the ochre cube, and the last bounding cube, the other ochre cube. Practically, three intermediate sectional cubes will be enough for most purposes. We will take a series of five figures—two terminal cubes and three intermediate sections—and demonstrate how the different areas appear in our space when we align each set of three out of the four axes of the tesseract within our space.

In this figure the tesseract is shown in five stages distant from our space: first, zero; second, 1/4 in.; third, 2/4 in.; fourth, 3/4 in.; fifth, 1 in.; which are called b0, b1, b2, b3, b4, because they are sections taken at distances 0, 1, 2, 3, 4 quarter inches along the blue line. All the regions can be named from the first cube, the b0 cube, as before, simply by remembering that transference along the b axis gives the addition of blue to the colour of the region in the ochre, the b0 cube. In the final cube b4, the colouring of the original b0 cube is repeated. Thus the red line moved along the blue axis gives a red and blue or purple square. This purple square appears as the three purple lines in the sections b1, b2, b3, taken at 1/4, 2/4, 3/4 of an inch in the fourth dimension. If the tesseract moves transverse to our space we have then in this particular region, first of all a red line which lasts for a moment, secondly a purple line which takes its[Pg 180] place. This purple line lasts for a minute—that is, all of a minute, except the moment taken by the crossing our space of the initial and final red line. The purple line having lasted for this period is succeeded by a red line, which lasts for a moment; then this goes and the tesseract has passed across our space. The final red line we call red bl., because it is separated from the initial red line by a distance along the axis for which we use the colour blue. Thus a line that lasts represents an area duration; is in this mode of presentation equivalent to a dimension of space. In the same way the white line, during the crossing our space by the tesseract, is succeeded by a light blue line which lasts for the inside of a minute, and as the tesseract leaves our space, having crossed it, the white bl. line appears as the final termination.
In this figure, the tesseract is shown in five stages apart from our space: first, 0; second, 1/4 in.; third, 2/4 in.; fourth, 3/4 in.; fifth, 1 in.; which are labeled b0, b1, b2, b3, b4, because they are sections taken at distances of 0, 1, 2, 3, and 4 quarter inches along the blue line. All the areas can be named from the first cube, the b0 cube, as before, simply by remembering that movement along the b axis adds blue to the color of the area in the ochre, the b0 cube. In the final cube b4, the coloring of the original b0 cube is repeated. Thus, the red line moving along the blue axis creates a red and blue or purple square. This purple square appears as the three purple lines in the sections b1, b2, b3, taken at 1/4, 2/4, and 3/4 of an inch in the fourth dimension. If the tesseract moves across our space, we first see a red line that lasts for a moment, then a purple line that takes its place. This purple line lasts for a minute—that is, just a minute, except for the moment that the initial and final red lines cross our space. The purple line, lasting for that duration, is followed by a red line, which lasts for a moment; then this fades as the tesseract moves through our space. The final red line is called red bl., because it is set apart from the initial red line by a distance along the axis for which we use the color blue. Thus, a line that lasts represents an area duration; in this format, it is equivalent to a dimension of space. Similarly, the white line, during the tesseract's passage through our space, is followed by a light blue line that lasts for just under a minute, and as the tesseract exits our space, the white bl. line appears as the final end point.
Take now the pink face. Moved in the blue direction it traces out a light purple cube. This light purple cube is shown in sections in b1, b2, b3, and the farther face of this cube in the blue direction is shown in b4—a pink face, called pink b because it is distant from the pink face we began with in the blue direction. Thus the cube which we colour light purple appears as a lasting square. The square face itself, the pink face, vanishes instantly the tesseract begins to move, but the light purple cube appears as a lasting square. Here also duration is the equivalent of a dimension of space—a lasting square is a cube. It is useful to connect these diagrams with the views given in the coloured plate.
Take the pink face now. When moved in the blue direction, it outlines a light purple cube. This light purple cube is displayed in sections in b1, b2, b3, and the back face of this cube in the blue direction is shown in b4—a pink face, referred to as pink b because it is away from the original pink face we started with in the blue direction. Therefore, the cube we color light purple appears as a lasting square. The square face itself, the pink face, disappears the moment the tesseract starts to move, but the light purple cube looks like a permanent square. Here, duration also represents a dimension of space—a lasting square is a cube. It's helpful to relate these diagrams to the illustrations provided in the colored plate.
Take again the orange face, that determined by the red and yellow axes; from it goes a brown cube in the blue direction, for red and yellow and blue are supposed to make brown. This brown cube is shown in three sections in the faces b1, b2, b3. In b4 is the opposite orange face of the brown cube, the face called orange b,[Pg 181] for it is distant in the blue direction from the orange face. As the tesseract passes transverse to our space, we have then in this region an instantly vanishing orange square, followed by a lasting brown square, and finally an orange face which vanishes instantly.
Take the orange face again, defined by the red and yellow axes; from it extends a brown cube in the blue direction, since red, yellow, and blue are thought to create brown. This brown cube is displayed in three sections on the faces b1, b2, b3. In b4 is the opposite orange face of the brown cube, the face known as orange b,[Pg 181] because it’s located in the blue direction away from the orange face. As the tesseract moves across our space, we see an orange square that disappears instantly, followed by a brown square that lasts, and finally, an orange face that vanishes instantly.
Now, as any three axes will be in our space, let us send the white axis out into the unknown, the fourth dimension, and take the blue axis into our known space dimension. Since the white and blue axes are perpendicular to each other, if the white axis goes out into the fourth dimension in the positive sense, the blue axis will come into the direction the white axis occupied, in the negative sense.
Now, since all three axes exist in our space, let’s extend the white axis into the unknown, the fourth dimension, and bring the blue axis into our known spatial dimension. Because the white and blue axes are perpendicular to each other, if the white axis extends into the fourth dimension in the positive direction, the blue axis will move back into the space where the white axis was located, in the negative direction.

Hence, not to complicate matters by having to think of two senses in the unknown direction, let us send the white line into the positive sense of the fourth dimension, and take the blue one as running in the negative sense of that direction which the white line has left; let the blue line, that is, run to the left. We have now the row of figures in fig. 108. The dotted cube shows where we had a cube when the white line ran in our space—now it has turned out of our space, and another solid boundary, another cubic face of the tesseract comes into our space. This cube has red and yellow axes as before; but now, instead of a white axis running to the right, there is a blue axis running to the left. Here we can distinguish the regions by colours in a perfectly systematic way. The red line traces out a purple[Pg 182] square in the transference along the blue axis by which this cube is generated from the orange face. This purple square made by the motion of the red line is the same purple face that we saw before as a series of lines in the sections b1, b2, b3. Here, since both red and blue axes are in our space, we have no need of duration to represent the area they determine. In the motion of the tesseract across space this purple face would instantly disappear.
To avoid complicating things by having to consider two directions in the unknown, let's send the white line moving forward in the positive direction of the fourth dimension, and let the blue line move in the opposite direction, to the left. Now we have the row of figures in fig. 108. The dotted cube indicates where we had a cube when the white line was in our space—now it has turned out of our space, and another solid boundary, another face of the tesseract, is coming into our space. This cube has red and yellow axes as before; but now, instead of a white axis extending to the right, there's a blue axis extending to the left. We can clearly distinguish the regions by color in a systematic way. The red line creates a purple[Pg 182] square during the transfer along the blue axis by which this cube is generated from the orange face. This purple square created by the movement of the red line is the same purple face we saw previously as a series of lines in sections b1, b2, b3. Here, with both the red and blue axes in our space, we don't need duration to represent the area they define. As the tesseract moves through space, this purple face would instantly vanish.
From the orange face, which is common to the initial cubes in fig. 107 and fig. 108, there goes in the blue direction a cube coloured brown. This brown cube is now all in our space, because each of its three axes run in space directions, up, away, to the left. It is the same brown cube which appeared as the successive faces on the sections b1, b2, b3. Having all its three axes in our space, it is given in extension; no part of it needs to be represented as a succession. The tesseract is now in a new position with regard to our space, and when it moves across our space the brown cube instantly disappears.
From the orange face, which is common to the initial cubes in fig. 107 and fig. 108, a brown cube extends in the blue direction. This brown cube occupies our space entirely, as each of its three axes runs in space directions: up, away, and to the left. It's the same brown cube that appeared as the successive faces on the sections b1, b2, b3. With all three axes in our space, it exists in its full form; there's no need to represent it as a progression. The tesseract is now in a new position relative to our space, and as it moves through our space, the brown cube instantly vanishes.
In order to exhibit the other regions of the tesseract we must remember that now the white line runs in the unknown dimension. Where shall we put the sections at distances along the line? Any arbitrary position in our space will do: there is no way by which we can represent their real position.
In order to show the other regions of the tesseract, we need to keep in mind that the white line now runs through the unknown dimension. Where should we place the sections at different points along the line? Any random spot in our space will work: there’s no way to accurately represent their actual position.
However, as the brown cube comes off from the orange face to the left, let us put these successive sections to the left. We can call them wh0, wh1, wh2, wh3, wh4, because they are sections along the white axis, which now runs in the unknown dimension.
However, as the brown cube moves away from the orange face on the left, let’s place these consecutive sections to the left. We can label them wh0, wh1, wh2, wh3, wh4, since they are sections along the white axis, which now extends into an unknown dimension.
Running from the purple square in the white direction we find the light purple cube. This is represented in the [Pg 183]sections wh1, wh2, wh3, wh4, fig. 108. It is the same cube that is represented in the sections b1, b2, b3: in fig. 107 the red and white axes are in our space, the blue out of it; in the other case, the red and blue are in our space, the white out of it. It is evident that the face pink y, opposite the pink face in fig. 107, makes a cube shown in squares in b1, b2, b3, b4, on the opposite side to the l purple squares. Also the light yellow face at the base of the cube b0, makes a light green cube, shown as a series of base squares.
Running from the purple square in the white direction, we come across the light purple cube. This is shown in the [Pg 183]sections wh1, wh2, wh3, wh4, fig. 108. It is the same cube that appears in sections b1, b2, b3: in fig. 107, the red and white axes are in our space, while the blue is outside of it; in the other case, the red and blue are in our space, with the white axis outside. It's clear that the pink face y, opposite the pink face in fig. 107, forms a cube represented in squares in b1, b2, b3, b4, on the side opposite the l purple squares. Also, the light yellow face at the base of the cube b0 creates a light green cube, depicted as a series of base squares.
The same light green cube can be found in fig. 107. The base square in wh0 is a green square, for it is enclosed by blue and yellow axes. From it goes a cube in the white direction, this is then a light green cube and the same as the one just mentioned as existing in the sections b0, b1, b2, b3, b4.
The same light green cube can be found in fig. 107. The base square in wh0 is a green square, as it's surrounded by blue and yellow axes. A cube extends in the white direction, which is also a light green cube and the same one mentioned earlier that exists in the sections b0, b1, b2, b3, b4.
The case is, however, a little different with the brown cube. This cube we have altogether in space in the section wh0, fig. 108, while it exists as a series of squares, the left-hand ones, in the sections b0, b1, b2, b3, b4. The brown cube exists as a solid in our space, as shown in fig. 108. In the mode of representation of the tesseract exhibited in fig. 107, the same brown cube appears as a succession of squares. That is, as the tesseract moves across space, the brown cube would actually be to us a square—it would be merely the lasting boundary of another solid. It would have no thickness at all, only extension in two dimensions, and its duration would show its solidity in three dimensions.
The situation is a bit different with the brown cube. This cube is entirely present in space in the section wh0, fig. 108, while it appears as a series of squares, specifically the left-hand ones, in the sections b0, b1, b2, b3, b4. The brown cube exists as a solid in our space, as shown in fig. 108. In the representation of the tesseract displayed in fig. 107, the same brown cube looks like a series of squares. In other words, as the tesseract moves through space, the brown cube would actually appear to us as a square—it would just be the enduring boundary of another solid. It wouldn't have any thickness at all, only extension in two dimensions, and its persistence would represent its solidity in three dimensions.
It is obvious that, if there is a four-dimensional space, matter in three dimensions only is a mere abstraction; all material objects must then have a slight four-dimensional thickness. In this case the above statement will undergo modification. The material cube which is used as the model of the boundary of a tesseract will have a slight thickness in the fourth dimension, and when the cube is[Pg 184] presented to us in another aspect, it would not be a mere surface. But it is most convenient to regard the cubes we use as having no extension at all in the fourth dimension. This consideration serves to bring out a point alluded to before, that, if there is a fourth dimension, our conception of a solid is the conception of a mere abstraction, and our talking about real three-dimensional objects would seem to a four-dimensional being as incorrect as a two-dimensional being’s telling about real squares, real triangles, etc., would seem to us.
It’s clear that if there’s a four-dimensional space, then matter in three dimensions is just an abstraction; all physical objects would actually have a slight thickness in the fourth dimension. Therefore, the previous statement would need to be adjusted. The material cube used as the model for the boundary of a tesseract would have a slight thickness in that fourth dimension, and when we look at the cube from a different perspective, it wouldn’t just be a flat surface. However, it's easier to think of the cubes we use as having no extension in the fourth dimension. This leads to a point mentioned earlier: if there is a fourth dimension, our idea of a solid is just an abstraction, and our discussions about real three-dimensional objects would seem as incorrect to a four-dimensional being as a two-dimensional being talking about real squares, real triangles, etc., would seem to us.
The consideration of the two views of the brown cube shows that any section of a cube can be looked at by a presentation of the cube in a different position in four-dimensional space. The brown faces in b1, b2, b3, are the very same brown sections that would be obtained by cutting the brown cube, wh0, across at the right distances along the blue line, as shown in fig. 108. But as these sections are placed in the brown cube, wh0, they come behind one another in the blue direction. Now, in the sections wh1, wh2, wh3, we are looking at these sections from the white direction—the blue direction does not exist in these figures. So we see them in a direction at right angles to that in which they occur behind one another in wh0. There are intermediate views, which would come in the rotation of a tesseract. These brown squares can be looked at from directions intermediate between the white and blue axes. It must be remembered that the fourth dimension is perpendicular equally to all three space axes. Hence we must take the combinations of the blue axis, with each two of our three axes, white, red, yellow, in turn.
The consideration of the two views of the brown cube shows that any slice of a cube can be viewed by positioning the cube differently in four-dimensional space. The brown faces in b1, b2, b3 are the exact same brown sections that would result from slicing the brown cube, wh0, at the right distances along the blue line, as illustrated in fig. 108. However, as these sections are positioned in the brown cube, wh0, they stack behind one another in the blue direction. Now, in the sections wh1, wh2, wh3, we're viewing these sections from the white direction—the blue direction isn’t represented in these figures. This means we see them from a direction that is at a right angle to how they are arranged behind one another in wh0. There are intermediate views that would appear during the rotation of a tesseract. These brown squares can be viewed from angles that are in between the white and blue axes. It’s important to remember that the fourth dimension is perpendicular to all three spatial axes. Therefore, we must explore the combinations of the blue axis with each pair of our three axes: white, red, and yellow, one at a time.
In fig. 109 we take red, white, and blue axes in space, sending yellow into the fourth dimension. If it goes into the positive sense of the fourth dimension the blue line will come in the opposite direction to that in which the[Pg 185] yellow line ran before. Hence, the cube determined by the white, red, blue axes, will start from the pink plane and run towards us. The dotted cube shows where the ochre cube was. When it is turned out of space, the cube coming towards from its front face is the one which comes into our space in this turning. Since the yellow line now runs in the unknown dimension we call the sections y0, y1, y2, y3, y4, as they are made at distances 0, 1, 2, 3, 4, quarter inches along the yellow line. We suppose these cubes arranged in a line coming towards us—not that that is any more natural than any other arbitrary series of positions, but it agrees with the plan previously adopted.
In fig. 109, we take red, white, and blue axes in space, sending yellow into the fourth dimension. If it moves in the positive direction of the fourth dimension, the blue line will come from the opposite direction of where the yellow line was going before. Therefore, the cube defined by the white, red, and blue axes will start from the pink plane and move toward us. The dotted cube indicates where the ochre cube was. When it is turned out of space, the cube coming toward us from its front face is the one that enters our space during this rotation. Since the yellow line now runs in the unknown dimension, we label the sections y0, y1, y2, y3, y4, as they are created at distances of 0, 1, 2, 3, and 4 quarter inches along the yellow line. We imagine these cubes lined up coming toward us—not that this is any more natural than any other random sequence of positions, but it aligns with the plan we've previously established.

The interior of the first cube, y0, is that derived from pink by adding blue, or, as we call it, light purple. The faces of the cube are light blue, purple, pink. As drawn, we can only see the face nearest to us, which is not the one from which the cube starts—but the face on the opposite side has the same colour name as the face towards us.
The inside of the first cube, y0, comes from mixing pink with blue, which we refer to as light purple. The sides of the cube are light blue, purple, and pink. In the illustration, we can only see the face closest to us, which is not the one where the cube begins—but the face on the opposite side is the same color as the one facing us.
The successive sections of the series, y0, y1, y2, etc., can be considered as derived from sections of the b0 cube made at distances along the yellow axis. What is distant a quarter inch from the pink face in the yellow direction? This question is answered by taking a section from a point a quarter inch along the yellow axis in the cube b0, fig. 107. It is an ochre section with lines orange and light yellow. This section will therefore take the place of the pink face[Pg 186] in y1 when we go on in the yellow direction. Thus, the first section, y1, will begin from an ochre face with light yellow and orange lines. The colour of the axis which lies in space towards us is blue, hence the regions of this section-cube are determined in nomenclature, they will be found in full in fig. 105.
The successive sections of the series, y0, y1, y2, etc., can be seen as coming from sections of the b0 cube taken at distances along the yellow axis. What is located a quarter inch from the pink face in the yellow direction? This question is answered by taking a section from a point a quarter inch down the yellow axis in the cube b0, fig. 107. It features an ochre section with orange and light yellow lines. This section will replace the pink face[Pg 186] in y1 as we move in the yellow direction. So, the first section, y1, will start from an ochre face with light yellow and orange lines. The color of the axis that extends towards us is blue, so the areas of this section-cube are defined in terms, which will be fully detailed in fig. 105.
There remains only one figure to be drawn, and that is the one in which the red axis is replaced by the blue. Here, as before, if the red axis goes out into the positive sense of the fourth dimension, the blue line must come into our space in the negative sense of the direction which the red line has left. Accordingly, the first cube will come in beneath the position of our ochre cube, the one we have been in the habit of starting with.
There’s just one more figure to draw, and that’s the one where the red axis is switched out for the blue. Just like before, if the red axis moves into the positive direction of the fourth dimension, the blue line has to move into our space in the negative direction from where the red line has gone. So, the first cube will appear underneath the position of our ochre cube, the one we usually start with.

To show these figures we must suppose the ochre cube to be on a movable stand. When the red line swings out into the unknown dimension, and the blue line comes in downwards, a cube appears below the place occupied by the ochre cube. The dotted cube shows where the ochre cube was. That cube has gone and a different cube runs downwards from its base. This cube has white, yellow, and blue axes. Its top is a light yellow square, and hence its interior is light yellow + blue or light green. Its front face is formed by the white line moving along the blue axis, and is therefore light blue, the left-hand side is formed by the yellow line moving along the blue axis, and therefore green.
To illustrate these shapes, we need to imagine the ochre cube is on a movable stand. When the red line extends into the unknown dimension and the blue line comes down, a cube appears below the spot where the ochre cube was. The dotted cube indicates the position of the ochre cube. That cube has disappeared, and a different cube is extending downwards from its base. This new cube has white, yellow, and blue axes. Its top is a light yellow square, so its interior is light yellow + blue, or light green. The front face is created by the white line moving along the blue axis, making it light blue, while the left side is formed by the yellow line moving along the blue axis, resulting in green.
[Pg 187]
[Pg 187]
As the red line now runs in the fourth dimension, the successive sections can he called r0, r1, r2, r3, r4, these letters indicating that at distances 0, 1/4, 2/4, 3/4, 1 inch along the red axis we take all of the tesseract that can be found in a three-dimensional space, this three-dimensional space extending not at all in the fourth dimension, but up and down, right and left, far and near.
As the red line now exists in the fourth dimension, the successive sections can be labeled r0, r1, r2, r3, r4, with these letters indicating that at distances of 0, 1/4, 2/4, 3/4, and 1 inch along the red axis, we take all of the tesseract that can be found in three-dimensional space. This three-dimensional space extends not at all in the fourth dimension, but only up and down, left and right, and near and far.
We can see what should replace the light yellow face of r0, when the section r1 comes in, by looking at the cube b0, fig. 107. What is distant in it one-quarter of an inch from the light yellow face in the red direction? It is an ochre section with orange and pink lines and red points; see also fig. 103.
We can see what should take the place of the light yellow face of r0 when the section r1 comes in, by looking at the cube b0, fig. 107. What is located one-quarter of an inch away from the light yellow face in the red direction? It is an ochre section with orange and pink lines and red dots; see also fig. 103.
This square then forms the top square of r1. Now we can determine the nomenclature of all the regions of r1 by considering what would be formed by the motion of this square along a blue axis.
This square is now the top square of r1. We can now figure out the names of all the regions of r1 by thinking about what would happen as this square moves along a blue axis.
A section of the r0 cube has green, light blue, green, light blue sides and blue points.
A part of the r0 cube has green, light blue, green, light blue sides and blue dots.
Now this square occurs on the base of each of the section figures, b1, b2, etc. In them we see that 1/4 inch in the red direction from it lies a section with brown and light purple lines and purple corners, the interior being of light brown. Hence this is the nomenclature of the section which in r1 replaces the section of r0 made from a point along the blue axis.
Now this square appears at the base of each of the section figures, b1, b2, etc. In these, we can see that 1/4 inch in the red direction from it is a section with brown and light purple lines and purple corners, while the interior is light brown. This is the naming convention for the section that in r1 replaces the section of r0 that was created from a point along the blue axis.
Hence the colouring as given can be derived.
Hence, the provided coloring can be derived.
We have thus obtained a perfectly named group of tesseracts. We can take a group of eighty-one of them 3 × 3 × 3 × 3, in four dimensions, and each tesseract will have its name null, red, white, yellow, blue, etc., and[Pg 188] whatever cubic view we take of them we can say exactly what sides of the tesseracts we are handling, and how they touch each other.[5]
We have now created a well-named group of tesseracts. We can take a group of eighty-one of them, arranged 3 × 3 × 3 × 3 in four dimensions, and each tesseract will be labeled null, red, white, yellow, blue, etc. Regardless of the cubic perspective we choose, we can clearly specify which sides of the tesseracts we are dealing with and how they connect to one another.[Pg 188]
Thus, for instance, if we have the sixteen tesseracts shown below, we can ask how does null touch blue.
Thus, for example, if we have the sixteen tesseracts shown below, we can ask how does null touch blue.

In the arrangement given in fig. 111 we have the axes white, red, yellow, in space, blue running in the fourth dimension. Hence we have the ochre cubes as bases. Imagine now the tesseractic group to pass transverse to our space—we have first of all null ochre cube, white ochre cube, etc.; these instantly vanish, and we get the section shown in the middle cube in fig. 103, and finally, just when the tesseract block has moved one inch transverse to our space, we have null ochre cube, and then immediately afterwards the ochre cube of blue comes in. Hence the tesseract null touches the tesseract blue by its ochre cube, which is in contact, each and every point of it, with the ochre cube of blue.
In the arrangement shown in fig. 111, we have the axes white, red, and yellow in space, with blue running in the fourth dimension. This gives us the ochre cubes as bases. Now, imagine the tesseract group moving across our space—we first have the null ochre cube, then the white ochre cube, and so on; these instantly disappear, and we see the section displayed in the middle cube in fig. 103. Finally, just as the tesseract block has moved one inch across our space, we encounter the null ochre cube, and shortly after that, the ochre cube of blue appears. Thus, the tesseract null touches the tesseract blue through its ochre cube, which is in contact at every single point with the ochre cube of blue.
How does null touch white, we may ask? Looking at the beginning A, fig. 111, where we have the ochre[Pg 189] cubes, we see that null ochre touches white ochre by an orange face. Now let us generate the null and white tesseracts by a motion in the blue direction of each of these cubes. Each of them generates the corresponding tesseract, and the plane of contact of the cubes generates the cube by which the tesseracts are in contact. Now an orange plane carried along a blue axis generates a brown cube. Hence null touches white by a brown cube.
How does null touch white, we might ask? Looking at the beginning A, fig. 111, where we have the ochre[Pg 189] cubes, we see that null ochre touches white ochre by an orange face. Now let’s generate the null and white tesseracts by moving in the blue direction of each of these cubes. Each generates the corresponding tesseract, and the plane where the cubes meet generates the cube that the tesseracts are in contact with. Now an orange plane moving along a blue axis creates a brown cube. So, null touches white through a brown cube.

If we ask again how red touches light blue tesseract, let us rearrange our group, fig. 112, or rather turn it about so that we have a different space view of it; let the red axis and the white axis run up and right, and let the blue axis come in space towards us, then the yellow axis runs in the fourth dimension. We have then two blocks in which the bounding cubes of the tesseracts are given, differently arranged with regard to us—the arrangement is really the same, but it appears different to us. Starting from the plane of the red and white axes we have the four squares of the null, white, red, pink tesseracts as shown in A, on the red, white plane, unaltered, only from them now comes out towards us the blue axis.[Pg 190] Hence we have null, white, red, pink tesseracts in contact with our space by their cubes which have the red, white, blue axis in them, that is by the light purple cubes. Following on these four tesseracts we have that which comes next to them in the blue direction, that is the four blue, light blue, purple, light purple. These are likewise in contact with our space by their light purple cubes, so we see a block as named in the figure, of which each cube is the one determined by the red, white, blue, axes.
If we ask again how red interacts with light blue tesseract, let’s rearrange our group, fig. 112, or rather shift it around so that we get a different perspective on it; let the red axis and the white axis extend upward and to the right, while the blue axis comes towards us in space, and the yellow axis runs into the fourth dimension. We then have two blocks in which the surrounding cubes of the tesseracts are presented, arranged differently with respect to us—the arrangement is fundamentally the same, but it looks different to us. Starting from the plane of the red and white axes, we have the four squares of the null, white, red, and pink tesseracts shown in A, on the red-white plane, unchanged, only now the blue axis extends towards us. [Pg 190] Hence, we have the null, white, red, and pink tesseracts touching our space through their cubes that include the red, white, blue axes, meaning through the light purple cubes. Following these four tesseracts, we have what comes next to them in the blue direction, which are the four blue, light blue, purple, and light purple. These are also in contact with our space through their light purple cubes, so we see a block as indicated in the figure, where each cube is defined by the red, white, and blue axes.
The yellow line now runs out of space; accordingly one inch on in the fourth dimension we come to the tesseracts which follow on the eight named in C, fig. 112, in the yellow direction.
The yellow line has now run out of space; as a result, one inch forward in the fourth dimension brings us to the tesseracts that follow the eight mentioned in C, fig. 112, in the yellow direction.
These are shown in C.y1, fig. 112. Between figure C and C.y1 is that four-dimensional mass which is formed by moving each of the cubes in C one inch in the fourth dimension—that is, along a yellow axis; for the yellow axis now runs in the fourth dimension.
These are shown in C.y1, fig. 112. Between figure C and C.y1 is a four-dimensional mass created by shifting each of the cubes in C one inch in the fourth dimension—that is, along a yellow axis; the yellow axis now extends into the fourth dimension.
In the block C we observe that red (light purple cube) touches light blue (light purple cube) by a point. Now these two cubes moving together remain in contact during the period in which they trace out the tesseracts red and light blue. This motion is along the yellow axis, consequently red and light blue touch by a yellow line.
In block C, we see that the red (light purple cube) touches the light blue (light purple cube) at a point. Now, as these two cubes move together, they stay in contact while they create the red and light blue tesseracts. This movement occurs along the yellow axis, so the red and light blue cubes connect along a yellow line.
We have seen that the pink face moved in a yellow direction traces out a cube; moved in the blue direction it also traces out a cube. Let us ask what the pink face will trace out if it is moved in a direction within the tesseract lying equally between the yellow and blue directions. What section of the tesseract will it make?
We’ve observed that when the pink face moves in the yellow direction, it outlines a cube; when it moves in the blue direction, it also outlines a cube. Let’s consider what the pink face will outline if it moves in a direction within the tesseract that is equally between the yellow and blue directions. What section of the tesseract will it create?
We will first consider the red line alone. Let us take a cube with the red line in it and the yellow and blue axes.
We will first look at the red line by itself. Let's take a cube that has the red line in it, along with the yellow and blue axes.
[Pg 191]
[Pg 191]

The cube with the yellow, red, blue axes is shown in fig. 113. If the red line is moved equally in the yellow and in the blue direction by four equal motions of ¼ inch each, it takes the positions 11, 22, 33, and ends as a red line.
The cube with the yellow, red, and blue axes is shown in fig. 113. If the red line is moved equally in the yellow and blue directions by four equal motions of ¼ inch each, it reaches the positions 11, 22, 33, and ends as a red line.
Now, the whole of this red, yellow, blue, or brown cube appears as a series of faces on the successive sections of the tesseract starting from the ochre cube and letting the blue axis run in the fourth dimension. Hence the plane traced out by the red line appears as a series of lines in the successive sections, in our ordinary way of representing the tesseract; these lines are in different places in each successive section.
Now, the entire red, yellow, blue, or brown cube looks like a set of faces on the different slices of the tesseract, beginning with the ochre cube and allowing the blue axis to extend into the fourth dimension. So, the plane outlined by the red line appears as a series of lines in the successive slices, in the usual way we represent the tesseract; these lines are in different positions in each slice.

Thus drawing our initial cube and the successive sections, calling them b0, b1, b2, b3, b4, fig. 115, we have the red line subject to this movement appearing in the positions indicated.
Thus, by drawing our starting cube and the following sections, labeling them b0, b1, b2, b3, b4, fig. 115, we can see the red line affected by this movement appearing in the positions shown.
We will now investigate what positions in the tesseract another line in the pink face assumes when it is moved in a similar manner.
We will now explore what positions on the pink face of the tesseract another line takes when it is moved in a similar way.
Take a section of the original cube containing a vertical line, 4, in the pink plane, fig. 115. We have, in the section, the yellow direction, but not the blue.
Take a section of the original cube that includes a vertical line, 4, in the pink plane, fig. 115. In this section, we have the yellow direction, but not the blue.
[Pg 192]
[Pg 192]
From this section a cube goes off in the fourth dimension, which is formed by moving each point of the section in the blue direction.
From this section, a cube extends into the fourth dimension, created by moving each point of the section in the blue direction.


Drawing this cube we have fig. 116.
Drawing this cube we have __A_TAG_PLACEHOLDER_0__.
Now this cube occurs as a series of sections in our original representation of the tesseract. Taking four steps as before this cube appears as the sections drawn in b0, b1, b2, b3, b4, fig. 117, and if the line 4 is subjected to a movement equal in the blue and yellow directions, it will occupy the positions designated by 4, 41, 42, 43, 44.
Now, this cube appears as a series of sections in our original representation of the tesseract. Taking four steps as before, this cube shows up as the sections drawn in b0, b1, b2, b3, b4, fig. 117, and if line 4 is moved equally in the blue and yellow directions, it will occupy the positions marked by 4, 41, 42, 43, 44.

Hence, reasoning in a similar manner about every line, it is evident that, moved equally in the blue and yellow directions, the pink plane will trace out a space which is shown by the series of section planes represented in the diagram.
Hence, thinking in the same way about every line, it becomes clear that, when moved equally in the blue and yellow directions, the pink plane will create a space represented by the series of section planes shown in the diagram.
Thus the space traced out by the pink face, if it is moved equally in the yellow and blue directions, is represented by the set of planes delineated in Fig. 118, pink[Pg 193] face or 0, then 1, 2, 3, and finally pink face or 4. This solid is a diagonal solid of the tesseract, running from a pink face to a pink face. Its length is the length of the diagonal of a square, its side is a square.
Thus, the area defined by the pink face, when moved equally in the yellow and blue directions, is shown by the set of planes outlined in Fig. 118, pink face or 0, then 1, 2, 3, and finally pink face or 4. This shape is a diagonal solid of the tesseract, extending from one pink face to another. Its length is the diagonal length of a square, and its side is a square.
Let us now consider the unlimited space which springs from the pink face extended.
Let’s now think about the endless space created by the stretched-out pink face.
This space, if it goes off in the yellow direction, gives us in it the ochre cube of the tesseract. Thus, if we have the pink face given and a point in the ochre cube, we have determined this particular space.
This space, if it moves toward the yellow side, gives us the ochre cube of the tesseract. So, if we have the pink face defined and a point in the ochre cube, we've established this specific space.
Similarly going off from the pink face in the blue direction is another space, which gives us the light purple cube of the tesseract in it. And any point being taken in the light purple cube, this space going off from the pink face is fixed.
Similarly, extending from the pink face in the blue direction is another area, which contains the light purple cube of the tesseract. And for any point chosen within the light purple cube, this space extending from the pink face remains fixed.

The space we are speaking of can be conceived as swinging round the pink face, and in each of its positions it cuts out a solid figure from the tesseract, one of which we have seen represented in fig. 118.
The space we're talking about can be thought of as rotating around the pink face, and at each position it carves out a solid shape from the tesseract, one of which we've seen shown in fig. 118.
Each of these solid figures is given by one position of the swinging space, and by one only. Hence in each of them, if one point is taken, the particular one of the slanting spaces is fixed. Thus we see that given a plane and a point out of it a space is determined.
Each of these solid shapes is defined by one position of the swinging space, and only one. Therefore, in each shape, if we select one point, the specific one of the slanting spaces is set. Thus, we can see that when a plane and a point outside of it are given, a space is established.
Now, two points determine a line.
Now, two points define a line.
Again, think of a line and a point outside it. Imagine a plane rotating round the line. At some time in its rotation it passes through the point. Thus a line and a[Pg 194] point, or three points, determine a plane. And finally four points determine a space. We have seen that a plane and a point determine a space, and that three points determine a plane; so four points will determine a space.
Again, imagine a line with a point outside of it. Picture a plane rotating around that line. At certain moments during its rotation, the plane intersects with the point. Therefore, a line and a[Pg 194] point, or three points, define a plane. Lastly, four points define a space. We know that a plane and a point define a space, and that three points define a plane; so it follows that four points will define a space.
These four points may be any points, and we can take, for instance, the four points at the extremities of the red, white, yellow, blue axes, in the tesseract. These will determine a space slanting with regard to the section spaces we have been previously considering. This space will cut the tesseract in a certain figure.
These four points can be any points, and we can take, for example, the four points at the ends of the red, white, yellow, and blue axes in the tesseract. These will create a slanted space compared to the section spaces we've looked at before. This space will intersect the tesseract at a specific shape.
One of the simplest sections of a cube by a plane is that in which the plane passes through the extremities of the three edges which meet in a point. We see at once that this plane would cut the cube in a triangle, but we will go through the process by which a plane being would most conveniently treat the problem of the determination of this shape, in order that we may apply the method to the determination of the figure in which a space cuts a tesseract when it passes through the 4 points at unit distance from a corner.
One of the easiest ways to slice a cube with a plane is when the plane goes through the ends of the three edges that meet at a point. It's clear that this plane would create a triangle in the cube, but let's go through the process of how a plane would best tackle this issue to determine this shape. This way, we can use the same method to figure out the shape formed when a space intersects a tesseract while passing through the 4 points, each one unit away from a corner.
We know that two points determine a line, three points determine a plane, and given any two points in a plane the line between them lies wholly in the plane.
We know that two points define a line, three points define a plane, and for any two points in a plane, the line connecting them lies completely within that plane.

Let now the plane being study the section made by a plane passing through the null r, null wh, and null y points, fig. 119. Looking at the orange square, which, as usual, we suppose to be initially in his plane, he sees that the line from null r to null y, which is a line in the section plane, the plane, namely, through the three extremities of the edges meeting in null, cuts the orange[Pg 195] face in an orange line with null points. This then is one of the boundaries of the section figure.
Let’s consider the plane under study, defined by a plane that goes through the points null r, null wh, and null y, fig. 119. Looking at the orange square, which we will assume starts in this plane, he observes that the line from null r to null y—which lies in the section plane through the three edge endpoints meeting at null—intersects the orange face along an orange line with null points. This is one of the boundaries of the section figure.
Let now the cube be so turned that the pink face comes in his plane. The points null r and null wh are now visible. The line between them is pink with null points, and since this line is common to the surface of the cube and the cutting plane, it is a boundary of the figure in which the plane cuts the cube.
Let the cube be turned so that the pink face is in its plane. The points null r and null wh are now visible. The line between them is pink with null points, and since this line is common to the surface of the cube and the cutting plane, it serves as a boundary of the shape where the plane intersects the cube.
Again, suppose the cube turned so that the light yellow face is in contact with the plane being’s plane. He sees two points, the null wh and the null y. The line between these lies in the cutting plane. Hence, since the three cutting lines meet and enclose a portion of the cube between them, he has determined the figure he sought. It is a triangle with orange, pink, and light yellow sides, all equal, and enclosing an ochre area.
Again, imagine the cube rotated so that the light yellow face is touching the plane of the being. He sees two points, the null wh and the null y. The line connecting these lies in the cutting plane. Therefore, since the three cutting lines meet and form a section of the cube, he has identified the shape he was looking for. It’s a triangle with orange, pink, and light yellow sides, all equal, enclosing an ochre area.
Let us now determine in what figure the space, determined by the four points, null r, null y, null wh, null b, cuts the tesseract. We can see three of these points in the primary position of the tesseract resting against our solid sheet by the ochre cube. These three points determine a plane which lies in the space we are considering, and this plane cuts the ochre cube in a triangle, the interior of which is ochre (fig. 119 will serve for this view), with pink, light yellow and orange sides, and null points. Going in the fourth direction, in one sense, from this plane we pass into the tesseract, in the other sense we pass away from it. The whole area inside the triangle is common to the cutting plane we see, and a boundary of the tesseract. Hence we conclude that the triangle drawn is common to the tesseract and the cutting space.
Let’s now figure out what shape the area defined by the four points, null r, null y, null wh, and null b, intersects with the tesseract. We can observe three of these points in the primary position of the tesseract resting against our solid sheet by the ochre cube. These three points create a plane that exists in the space we're looking at, and this plane intersects the ochre cube in a triangle, the inside of which is ochre (fig. 119 will serve for this view), with pink, light yellow, and orange sides, and null points. Moving in the fourth direction, in one direction from this plane, we enter the tesseract; in the opposite direction, we move away from it. The entire area within the triangle is shared between the cutting plane we see and the boundary of the tesseract. Therefore, we conclude that the drawn triangle is shared between the tesseract and the cutting space.
[Pg 196]
[Pg 196]

Now let the ochre cube turn out and the brown cube come in. The dotted lines show the position the ochre cube has left (fig. 120).
Now let the ochre cube come out and the brown cube come in. The dotted lines show where the ochre cube was (fig. 120).
Here we see three out of the four points through which the cutting plane passes, null r, null y, and null b. The plane they determine lies in the cutting space, and this plane cuts out of the brown cube a triangle with orange, purple and green sides, and null points. The orange line of this figure is the same as the orange line in the last figure.
Here we see three of the four points through which the cutting plane passes: null r, null y, and null b. The plane they create is in the cutting space, and this plane cuts out a triangle from the brown cube with orange, purple, and green sides, along with null points. The orange line in this figure is the same as the orange line in the previous figure.
Now let the light purple cube swing into our space, towards us, fig. 121.
Now let the light purple cube swing into our space, towards us, fig. 121.

The cutting space which passes through the four points, null r, y, wh, b, passes through the null r, wh, b, and therefore the plane these determine lies in the cutting space.
The cutting space that goes through the four points, null r, y, wh, b, also passes through the null r, wh, b, so the plane created by these points lies within the cutting space.
This triangle lies before us. It has a light purple interior and pink, light blue, and purple edges with null points.
This triangle is in front of us. It has a light purple inside and pink, light blue, and purple edges with no points.
This, since it is all of the plane that is common to it, and this bounding of the tesseract, gives us one of the bounding faces of our sectional figure. The pink line in it is the same as the pink line we found in the first figure—that of the ochre cube.
This, since it includes all the parts of the plane that are shared with it, and this outline of the tesseract, provides us with one of the boundary surfaces of our sectional figure. The pink line in this figure is the same as the pink line we found in the first figure—the one from the ochre cube.
Finally, let the tesseract swing about the light yellow plane, so that the light green cube comes into our space. It will point downwards.
Finally, let the tesseract rotate around the light yellow plane, so the light green cube enters our space. It will face downward.

The three points, n.y, n.wh, n.b, are in the cutting[Pg 197] space, and the triangle they determine is common to the tesseract and the cutting space. Hence this boundary is a triangle having a light yellow line, which is the same as the light yellow line of the first figure, a light blue line and a green line.
The three points, n.y, n.wh, n.b, are in the cutting[Pg 197] space, and the triangle they form is shared by the tesseract and the cutting space. Therefore, this boundary is a triangle with a light yellow line, which matches the light yellow line of the first figure, along with a light blue line and a green line.
We have now traced the cutting space between every set of three that can be made out of the four points in which it cuts the tesseract, and have got four faces which all join on to each other by lines.
We have now mapped the cutting space between every set of three that can be formed from the four points where it intersects the tesseract, and have identified four faces that all connect to each other through lines.

The triangles are shown in fig. 123 as they join on to the triangle in the ochre cube. But they join on each to the other in an exactly similar manner; their edges are all identical two and two. They form a closed figure, a tetrahedron, enclosing a light brown portion which is the portion of the cutting space which lies inside the tesseract.
The triangles are shown in fig. 123 as they connect to the triangle on the ochre cube. However, they connect to each other in exactly the same way; their edges are identical in pairs. They create a closed shape, a tetrahedron, enclosing a light brown area that represents the part of the cutting space inside the tesseract.
We cannot expect to see this light brown portion, any more than a plane being could expect to see the inside of a cube if an angle of it were pushed through his plane. All he can do is to come upon the boundaries of it in a different way to that in which he would if it passed straight through his plane.
We can’t expect to see this light brown area any more than a two-dimensional being could expect to see the inside of a cube if one of its corners intersected their plane. All that being can do is encounter the edges of it in a way that's different from how they would if it passed straight through their plane.
Thus in this solid section; the whole interior lies perfectly open in the fourth dimension. Go round it as we may we are simply looking at the boundaries of the tesseract which penetrates through our solid sheet. If the tesseract were not to pass across so far, the triangle[Pg 198] would be smaller; if it were to pass farther, we should have a different figure, the outlines of which can be determined in a similar manner.
Thus in this solid section, the entire interior is completely exposed in the fourth dimension. No matter how we approach it, we are merely observing the edges of the tesseract that extends through our solid sheet. If the tesseract didn't extend this far, the triangle[Pg 198] would be smaller; if it extended further, we would see a different shape, the outlines of which can be identified in a similar way.
The preceding method is open to the objection that it depends rather on our inferring what must be, than our seeing what is. Let us therefore consider our sectional space as consisting of a number of planes, each very close to the last, and observe what is to be found in each plane.
The previous method has the drawback that it relies more on what we think must be true rather than what we can actually observe. So, let’s think of our sectional space as made up of several very close planes, and let’s examine what we can find in each plane.

The corresponding method in the case of two dimensions is as follows:—The plane being can see that line of the sectional plane through null y, null wh, null r, which lies in the orange plane. Let him now suppose the cube and the section plane to pass half way through his plane. Replacing the red and yellow axes are lines parallel to them, sections of the pink and light yellow faces.
The corresponding method for two dimensions is as follows:—The plane can be represented by the line of the sectional plane through null y, null wh, null r, which lies in the orange plane. Now let’s imagine the cube and the section plane intersecting halfway through this plane. Replacing the red and yellow axes, we have lines parallel to them, which are sections of the pink and light yellow faces.
Where will the section plane cut these parallels to the red and yellow axes?
Where will the section plane intersect these parallels to the red and yellow axes?
Let him suppose the cube, in the position of the drawing, fig. 124, turned so that the pink face lies against his plane. He can see the line from the null r point to the null wh point, and can see (compare fig. 119) that it cuts AB a parallel to his red axis, drawn at a point half way along the white line, in a point B, half way up. I shall speak of the axis as having the length of an edge of the cube. Similarly, by letting the cube turn so that the light yellow square swings against his plane, he can see (compare fig. 119) that a parallel to his yellow axis drawn from a point half-way along the white axis, is cut at half its length by the trace of the section plane in the light yellow face.
Let him imagine the cube, in the position shown in the drawing, fig. 124, rotated so that the pink face is against his plane. He can see the line from the null r point to the null wh point, and can see (see fig. 119) that it intersects AB parallel to his red axis, drawn at a point halfway along the white line, at a point B, halfway up. I will refer to the axis as having the length of an edge of the cube. Similarly, by rotating the cube so that the light yellow square faces his plane, he can see (see fig. 119) that a line parallel to his yellow axis, drawn from a point halfway along the white axis, is intersected at half its length by the trace of the section plane on the light yellow face.
[Pg 199]
[Pg 199]
Hence when the cube had passed half-way through he would have—instead of the orange line with null points, which he had at first—an ochre line of half its length, with pink and light yellow points. Thus, as the cube passed slowly through his plane, he would have a succession of lines gradually diminishing in length and forming an equilateral triangle. The whole interior would be ochre, the line from which it started would be orange. The succession of points at the ends of the succeeding lines would form pink and light yellow lines and the final point would be null. Thus looking at the successive lines in the section plane as it and the cube passed across his plane he would determine the figure cut out bit by bit.
Hence, when the cube had passed halfway through, he would have—instead of the orange line with no points, which he initially had—an ochre line half its length, with pink and light yellow points. So, as the cube slowly moved through his plane, he would see a series of lines gradually getting shorter and forming an equilateral triangle. The entire interior would be ochre, while the line it started from would be orange. The series of points at the ends of the following lines would create pink and light yellow lines, and the final point would be empty. Therefore, by looking at the successive lines in the section plane as it and the cube moved across his plane, he would figure out the shape bit by bit.
Coming now to the section of the tesseract, let us imagine that the tesseract and its cutting space pass slowly across our space; we can examine portions of it, and their relation to portions of the cutting space. Take the section space which passes through the four points, null r, wh, y, b; we can see in the ochre cube (fig. 119) the plane belonging to this section space, which passes through the three extremities of the red, white, yellow axes.
Coming now to the section of the tesseract, let's imagine that the tesseract and its cutting space slowly move through our space; we can look at portions of it and how they relate to portions of the cutting space. Take the section space that goes through the four points, null r, wh, y, b; we can see in the ochre cube (fig. 119) the plane that belongs to this section space, which passes through the three ends of the red, white, and yellow axes.
Now let the tesseract pass half way through our space. Instead of our original axes we have parallels to them, purple, light blue, and green, each of the same length as the first axes, for the section of the tesseract is of exactly the same shape as its ochre cube.
Now let the tesseract move halfway through our space. Instead of our original axes, we have parallels to them: purple, light blue, and green, all the same length as the first axes, because the section of the tesseract is exactly the same shape as its ochre cube.
But the sectional space seen at this stage of the transference would not cut the section of the tesseract in a plane disposed as at first.
But the sectional space observed at this point in the transference wouldn’t slice through the tesseract in the same way as before.
To see where the sectional space would cut these parallels to the original axes let the tesseract swing so that, the orange face remaining stationary, the blue line comes in to the left.
To see where the sectional space would intersect these parallels to the original axes, let the tesseract rotate so that, while the orange face stays in place, the blue line moves to the left.
[Pg 200]
[Pg 200]

Here (fig. 125) we have the null r, y, b points, and of the sectional space all we see is the plane through these three points in it.
Here (fig. 125) we have the null r, y, b points, and in the sectional space, all we see is the plane through these three points.
In this figure we can draw the parallels to the red and yellow axes and see that, if they started at a point half way along the blue axis, they would each be cut at a point so as to be half of their previous length.
In this figure, we can see parallels to the red and yellow axes. If they started at a point halfway along the blue axis, they would each be intersected at a point, making them half of their previous length.
Swinging the tesseract into our space about the pink face of the ochre cube we likewise find that the parallel to the white axis is cut at half its length by the sectional space.
Swinging the tesseract into our space around the pink face of the ochre cube, we also see that the parallel to the white axis is divided at half its length by the sectional space.

Hence in a section made when the tesseract had passed half across our space the parallels to the red, white, yellow axes, which are now in our space, are cut by the section space, each of them half way along, and for this stage of the traversing motion we should have fig. 126. The section made of this cube by the plane in which the sectional space cuts it, is an equilateral triangle with purple, l. blue, green points, and l. purple, brown, l. green lines.
Hence, in a section created when the tesseract had moved halfway across our space, the parallels to the red, white, and yellow axes, which are now in our space, are intersected by the section space, each of them halfway along. For this stage of the traversing motion, we should have fig. 126. The section made of this cube by the plane in which the sectional space cuts it is an equilateral triangle with purple, light blue, and green points, and light purple, brown, and light green lines.
Thus the original ochre triangle, with null points and pink, orange, light yellow lines, would be succeeded by a triangle coloured in manner just described.
Thus the original ochre triangle, with null points and pink, orange, light yellow lines, would be followed by a triangle colored in the way just described.
This triangle would initially be only a very little smaller than the original triangle, it would gradually diminish, until it ended in a point, a null point. Each of its edges would be of the same length. Thus the successive[Pg 201] sections of the successive planes into which we analyse the cutting space would be a tetrahedron of the description shown (fig. 123), and the whole interior of the tetrahedron would be light brown.
This triangle would start off only slightly smaller than the original triangle, and it would gradually shrink until it reached a point, a null point. Each of its edges would be the same length. So, the successive sections of the successive planes that we analyze in the cutting space would form a tetrahedron like the one shown (fig. 123), and the entire inside of the tetrahedron would be light brown.[Pg 201]

Fig. 127.
In fig. 127 the tetrahedron is represented by means of its faces as two triangles which meet in the p. line, and two rear triangles which join on to them, the diagonal of the pink face being supposed to run vertically upward.
In fig. 127 the tetrahedron is shown through its faces as two triangles that connect at the p. line, and two back triangles that attach to them, with the diagonal of the pink face thought to run straight up.
We have now reached a natural termination. The reader may pursue the subject in further detail, but will find no essential novelty. I conclude with an indication as to the manner in which figures previously given may be used in determining sections by the method developed above.
We have now come to a natural ending. The reader can explore the topic in more depth but will not discover anything fundamentally new. I will end with a suggestion on how the figures provided earlier can be used to determine sections using the method explained above.
Applying this method to the tesseract, as represented in Chapter IX., sections made by a space cutting the axes equidistantly at any distance can be drawn, and also the sections of tesseracts arranged in a block.
Applying this method to the tesseract, as shown in Chapter IX, we can draw sections where a space cuts the axes equally at any distance, as well as the sections of tesseracts organized in a block.
If we draw a plane, cutting all four axes at a point six units distance from null, we have a slanting space. This space cuts the red, white, yellow axes in the[Pg 202] points LMN (fig. 128), and so in the region of our space before we go off into the fourth dimension, we have the plane represented by LMN extended. This is what is common to the slanting space and our space.
If we create a plane that intersects all four axes at a point six units away from zero, we form a slanting space. This space intersects the red, white, and yellow axes at the[Pg 202] points LMN (fig. 128). Therefore, in our space, before we move into the fourth dimension, we have the plane represented by LMN extended. This is what is shared between the slanting space and our space.

This plane cuts the ochre cube in the triangle EFG.
This plane divides the ochre cube in the triangle EFG.
Comparing this with (fig. 72) oh, we see that the hexagon there drawn is part of the triangle EFG.
Comparing this with (fig. 72) oh, we see that the hexagon drawn here is part of the triangle EFG.
Let us now imagine the tesseract and the slanting space both together to pass transverse to our space, a distance of one unit, we have in 1h a section of the tesseract, whose axes are parallels to the previous axes. The slanting space cuts them at a distance of five units along each. Drawing the plane through these points in 1h it will be found to cut the cubical section of the tesseract in the hexagonal figure drawn. In 2h (fig. 72) the slanting space cuts the parallels to the axes at a distance of four along each, and the hexagonal figure is the section of this section of the tesseract by it. Finally when 3h comes in the slanting space cuts the axes at a distance of three along each, and the section is a triangle, of which the hexagon drawn is a truncated portion. After this the tesseract, which extends only three units in each of the four dimensions, has completely passed transverse of our space, and there is no more of it to be cut. Hence, putting the plane sections together in the right relations, we have the section determined by the particular slanting space: namely an octahedron.
Let’s now picture the tesseract and the slanting space together moving across our space by one unit. In 1h, we see a section of the tesseract, with its axes parallel to the earlier axes. The slanting space intersects them at a distance of five units along each axis. If we draw the plane through these points in 1h, it will cut through the cubic section of the tesseract, producing the hexagonal shape shown. In 2h (fig. 72), the slanting space intersects the parallels to the axes at a distance of four units along each, resulting in the hexagonal figure, which is the section of this part of the tesseract. Finally, in 3h, the slanting space intersects the axes at a distance of three units along each, and the section is a triangle, with the hexagon shown being a portion that’s been truncated. After this, the tesseract, which stretches only three units in each of the four dimensions, has completely passed through our space, leaving nothing else to cut. Therefore, when we put the plane sections together in the correct relations, we determine that the section created by the particular slanting space is an octahedron.
[Pg 203]
[Pg 203]
CHAPTER XIV.[6]
A RECAPITULATION AND EXTENSION OF
THE PHYSICAL ARGUMENT
[6] The contents of this chapter are taken from a paper read before the Philosophical Society of Washington. The mathematical portion of the paper has appeared in part in the Proceedings of the Royal Irish Academy under the title, “Cayley’s formulæ of orthogonal transformation,” Nov. 29th, 1903.
[6] The contents of this chapter come from a paper presented to the Philosophical Society of Washington. The mathematical section of the paper was partially published in the Proceedings of the Royal Irish Academy under the title, “Cayley’s Formulas of Orthogonal Transformation,” on November 29th, 1903.
There are two directions of inquiry in which the research for the physical reality of a fourth dimension can be prosecuted. One is the investigation of the infinitely great, the other is the investigation of the infinitely small.
There are two paths of inquiry that can be pursued in researching the physical reality of a fourth dimension. One is the exploration of the infinitely large, and the other is the exploration of the infinitely small.
By the measurement of the angles of vast triangles, whose sides are the distances between the stars, astronomers have sought to determine if there is any deviation from the values given by geometrical deduction. If the angles of a celestial triangle do not together equal two right angles, there would be an evidence for the physical reality of a fourth dimension.
By measuring the angles of huge triangles, where the sides are the distances between stars, astronomers have tried to see if there's any difference from the values provided by geometric calculations. If the angles of a celestial triangle don't add up to two right angles, it would show evidence for the physical existence of a fourth dimension.
This conclusion deserves a word of explanation. If space is really four-dimensional, certain conclusions follow which must be brought clearly into evidence if we are to frame the questions definitely which we put to Nature. To account for our limitation let us assume a solid material sheet against which we move. This sheet must stretch alongside every object in every direction in which it visibly moves. Every material body must slip or slide along this sheet, not deviating from contact with it in any motion which we can observe.
This conclusion needs some clarification. If space is actually four-dimensional, it leads to certain implications that we need to make clear if we want to properly frame the questions we ask of Nature. To understand our limitations, let's imagine a solid material sheet that we move against. This sheet must extend alongside every object in every direction that it visibly moves. Every material body must slide along this sheet, remaining in contact with it during any motion that we can observe.
[Pg 204]
[Pg 204]
The necessity for this assumption is clearly apparent, if we consider the analogous case of a suppositionary plane world. If there were any creatures whose experiences were confined to a plane, we must account for their limitation. If they were free to move in every space direction, they would have a three-dimensional motion; hence they must be physically limited, and the only way in which we can conceive such a limitation to exist is by means of a material surface against which they slide. The existence of this surface could only be known to them indirectly. It does not lie in any direction from them in which the kinds of motion they know of leads them. If it were perfectly smooth and always in contact with every material object, there would be no difference in their relations to it which would direct their attention to it.
The need for this assumption becomes clear when we think about a hypothetical two-dimensional world. If there were any beings whose experiences were limited to that plane, we have to consider their restrictions. If they could move in any direction, they would actually be moving in three dimensions; therefore, they must be physically restricted, and the only way we can imagine that restriction is through a material surface they could slide against. They would only know about this surface indirectly. It wouldn't be located in any direction that their forms of motion would lead them to explore. If that surface were perfectly smooth and in constant contact with all physical objects, there would be no differences in their interactions with it that would draw their attention to it.
But if this surface were curved—if it were, say, in the form of a vast sphere—the triangles they drew would really be triangles of a sphere, and when these triangles are large enough the angles diverge from the magnitudes they would have for the same lengths of sides if the surface were plane. Hence by the measurement of triangles of very great magnitude a plane being might detect a difference from the laws of a plane world in his physical world, and so be led to the conclusion that there was in reality another dimension to space—a third dimension—as well as the two which his ordinary experience made him familiar with.
But if this surface were curved—if it were, for example, shaped like a huge sphere—the triangles they drew would actually be triangles of a sphere. When these triangles are large enough, the angles would differ from what they would be if the surface were flat. Therefore, by measuring very large triangles, a flat being could notice a difference from the laws of a flat world in their physical world, leading them to conclude that there is, in fact, another dimension to space—a third dimension—beyond the two that their everyday experience has made them familiar with.
Now, astronomers have thought it worth while to examine the measurements of vast triangles drawn from one celestial body to another with a view to determine if there is anything like a curvature in our space—that is to say, they have tried astronomical measurements to find[Pg 205] out if the vast solid sheet against which, on the supposition of a fourth dimension, everything slides is curved or not. These results have been negative. The solid sheet, if it exists, is not curved or, being curved, has not a sufficient curvature to cause any observable deviation from the theoretical value of the angles calculated.
Now, astronomers have considered it worthwhile to examine the measurements of huge triangles drawn from one celestial body to another in order to determine if there’s any curvature in our space. In other words, they’ve used astronomical measurements to find out if the vast solid sheet, which, assuming a fourth dimension, everything slides against is curved or not. The results have been negative. The solid sheet, if it exists, is either not curved or, if it is curved, the curvature is not enough to cause any noticeable deviation from the theoretical values of the calculated angles.[Pg 205]
Hence the examination of the infinitely great leads to no decisive criterion. If it did we should have to decide between the present theory and that of metageometry.
Hence the examination of the infinitely large leads to no clear standard. If it did, we would have to choose between the current theory and that of metageometry.
Coming now to the prosecution of the inquiry in the direction of the infinitely small, we have to state the question thus: Our laws of movement are derived from the examination of bodies which move in three-dimensional space. All our conceptions are founded on the supposition of a space which is represented analytically by three independent axes and variations along them—that is, it is a space in which there are three independent movements. Any motion possible in it can be compounded out of these three movements, which we may call: up, right, away.
Coming now to the investigation of the infinitely small, we have to frame the question like this: Our laws of motion come from studying objects that move in three-dimensional space. All our ideas are based on the assumption of a space that is defined analytically by three independent axes and changes along them—that is, it is a space where there are three independent movements. Any possible motion in this space can be made up of these three movements, which we can label as: up, right, away.
To examine the actions of the very small portions of matter with the view of ascertaining if there is any evidence in the phenomena for the supposition of a fourth dimension of space, we must commence by clearly defining what the laws of mechanics would be on the supposition of a fourth dimension. It is of no use asking if the phenomena of the smallest particles of matter are like—we do not know what. We must have a definite conception of what the laws of motion would be on the supposition of the fourth dimension, and then inquire if the phenomena of the activity of the smaller particles of matter resemble the conceptions which we have elaborated.
To investigate the behavior of tiny bits of matter to see if there's any evidence for the idea of a fourth dimension of space, we need to start by clearly defining what the laws of mechanics would be if we assume there is a fourth dimension. It's pointless to ask if the behavior of the smallest particles resembles something unknown—we have no idea what that would be. We need to have a clear understanding of what the laws of motion would look like assuming a fourth dimension, and then we can see if the behavior of these tiny particles aligns with the concepts we've developed.
Now, the task of forming these conceptions is by no means one to be lightly dismissed. Movement in space has many features which differ entirely from movement[Pg 206] on a plane; and when we set about to form the conception of motion in four dimensions, we find that there is at least as great a step as from the plane to three-dimensional space.
Now, the job of shaping these ideas is definitely not something to take lightly. Movement in space has many aspects that are completely different from movement on a flat surface; and when we try to understand motion in four dimensions, we realize that it's at least as big of a leap as going from a flat plane to three-dimensional space. [Pg 206]
I do not say that the step is difficult, but I want to point out that it must be taken. When we have formed the conception of four-dimensional motion, we can ask a rational question of Nature. Before we have elaborated our conceptions we are asking if an unknown is like an unknown—a futile inquiry.
I’m not saying that the step is hard, but I want to highlight that it needs to be taken. Once we’ve grasped the idea of four-dimensional motion, we can ask a meaningful question about Nature. Before we’ve developed our ideas, asking if one unknown is similar to another unknown is a pointless question.
As a matter of fact, four-dimensional movements are in every way simple and more easy to calculate than three-dimensional movements, for four-dimensional movements are simply two sets of plane movements put together.
In fact, four-dimensional movements are, in every way, simpler and easier to calculate than three-dimensional movements, since four-dimensional movements are just two sets of plane movements combined.
Without the formation of an experience of four-dimensional bodies, their shapes and motions, the subject can be but formal—logically conclusive, not intuitively evident. It is to this logical apprehension that I must appeal.
Without the development of an experience involving four-dimensional bodies, their shapes and movements, the subject remains just formal—logically conclusive, but not intuitively obvious. It is this logical understanding that I need to rely on.
It is perfectly simple to form an experiential familiarity with the facts of four-dimensional movement. The method is analogous to that which a plane being would have to adopt to form an experiential familiarity with three-dimensional movements, and may be briefly summed up as the formation of a compound sense by means of which duration is regarded as equivalent to extension.
It’s really straightforward to develop an understanding of four-dimensional movement. The approach is similar to what a being in two dimensions would need to do to grasp three-dimensional movement, and can be summed up as creating a combined sense that treats duration as being equal to extension.
Consider a being confined to a plane. A square enclosed by four lines will be to him a solid, the interior of which can only be examined by breaking through the lines. If such a square were to pass transverse to his plane, it would immediately disappear. It would vanish, going in no direction to which he could point.
Consider a being stuck on a flat surface. To him, a square surrounded by four lines is a solid object that he can only explore by breaking through the lines. If this square were to move across his surface, it would instantly disappear. It would vanish without going in any direction he could identify.
If, now, a cube be placed in contact with his plane, its surface of contact would appear like the square which we[Pg 207] have just mentioned. But if it were to pass transverse to his plane, breaking through it, it would appear as a lasting square. The three-dimensional matter will give a lasting appearance in circumstances under which two-dimensional matter will at once disappear.
If we place a cube in contact with his plane, the area where they touch would look like the square we just talked about. However, if it moves through his plane, breaking through it, it would look like a permanent square. The three-dimensional object will create a lasting effect in situations where the two-dimensional object will immediately vanish.
Similarly, a four-dimensional cube, or, as we may call it, a tesseract, which is generated from a cube by a movement of every part of the cube in a fourth direction at right angles to each of the three visible directions in the cube, if it moved transverse to our space, would appear as a lasting cube.
Similarly, a four-dimensional cube, or what we can call a tesseract, is created from a cube by moving every part of the cube in a fourth direction that is perpendicular to the three visible directions in the cube. If it moved across our space, it would look like a solid cube.
A cube of three-dimensional matter, since it extends to no distance at all in the fourth dimension, would instantly disappear, if subjected to a motion transverse to our space. It would disappear and be gone, without it being possible to point to any direction in which it had moved.
A cube of three-dimensional matter, since it doesn't extend at all into the fourth dimension, would instantly vanish if it moved across our space. It would disappear completely, with no way to indicate any direction it had moved.
All attempts to visualise a fourth dimension are futile. It must be connected with a time experience in three space.
All attempts to visualize a fourth dimension are pointless. It has to be linked to a time experience in three-dimensional space.
The most difficult notion for a plane being to acquire would be that of rotation about a line. Consider a plane being facing a square. If he were told that rotation about a line were possible, he would move his square this way and that. A square in a plane can rotate about a point, but to rotate about a line would seem to the plane being perfectly impossible. How could those parts of his square which were on one side of an edge come to the other side without the edge moving? He could understand their reflection in the edge. He could form an idea of the looking-glass image of his square lying on the opposite side of the line of an edge, but by no motion that he knows of can he make the actual square assume that position. The result of the rotation would be like reflection in the edge, but it would be a physical impossibility to produce it in the plane.
The hardest concept for a flat being to grasp would be rotating around a line. Imagine a flat being looking at a square. If he were told that rotating around a line was possible, he would try to move his square in different ways. A square in a flat plane can rotate around a point, but rotating around a line would seem completely impossible to the flat being. How could the parts of his square on one side of an edge move to the other side without the edge moving? He might understand their reflection in the edge. He could picture a mirror image of his square on the opposite side of the edge, but by no motion he knows can he make the actual square take that position. The result of the rotation would be like a reflection in the edge, but it would be physically impossible to achieve it in the flat plane.
The demonstration of rotation about a line must be to[Pg 208] him purely formal. If he conceived the notion of a cube stretching out in an unknown direction away from his plane, then he can see the base of it, his square in the plane, rotating round a point. He can likewise apprehend that every parallel section taken at successive intervals in the unknown direction rotates in like manner round a point. Thus he would come to conclude that the whole body rotates round a line—the line consisting of the succession of points round which the plane sections rotate. Thus, given three axes, x, y, z, if x rotates to take the place of y, and y turns so as to point to negative x, then the third axis remaining unaffected by this turning is the axis about which the rotation takes place. This, then, would have to be his criterion of the axis of a rotation—that which remains unchanged when a rotation of every plane section of a body takes place.
The demonstration of rotation around a line would seem purely formal to him. If he imagined a cube extending in an unknown direction away from his plane, he could visualize the base of it, his square in the plane, rotating around a point. He could also understand that every parallel section taken at regular intervals in the unknown direction rotates similarly around a point. Therefore, he would conclude that the entire body rotates around a line—the line made up of the series of points around which the plane sections rotate. So, with three axes, x, y, and z, if x rotates to take the place of y, and y shifts to point toward negative x, then the third axis, which remains unaffected by this movement, is the axis around which the rotation occurs. This, then, would be his standard for identifying the axis of rotation—that which stays unchanged when every plane section of a body rotates.
There is another way in which a plane being can think about three-dimensional movements; and, as it affords the type by which we can most conveniently think about four-dimensional movements, it will be no loss of time to consider it in detail.
There’s another way for a plane being to think about three-dimensional movements, and since it provides the framework that allows us to most easily think about four-dimensional movements, it’s worth taking the time to look at it in detail.

We can represent the plane being and his object by figures cut out of paper, which slip on a smooth surface. The thickness of these bodies must be taken as so minute that their extension in the third dimension escapes the observation of the plane being, and he thinks about them as if they were mathematical plane figures in a plane instead of being material bodies capable of moving on a plane surface. Let Ax, Ay be two axes and ABCD a square. As far as movements in the plane are concerned, the square can rotate about a point A, for example. It cannot rotate about a side, such as AC.
We can represent a flat being and its object with paper cutouts that slide on a smooth surface. The thickness of these shapes should be considered so small that their height in the third dimension goes unnoticed by the flat being, making it think of them as if they were mathematical flat shapes on a plane, rather than physical objects that can move across a flat surface. Let Ax and Ay be two axes and ABCD a square. When it comes to movements in the plane, the square can rotate around a point A, for instance. It cannot rotate around a side, like AC.
[Pg 209]
[Pg 209]
But if the plane being is aware of the existence of a third dimension he can study the movements possible in the ample space, taking his figure portion by portion.
But if the plane being knows about the existence of a third dimension, he can study the movements possible in the spacious area, examining his figure part by part.
His plane can only hold two axes. But, since it can hold two, he is able to represent a turning into the third dimension if he neglects one of his axes and represents the third axis as lying in his plane. He can make a drawing in his plane of what stands up perpendicularly from his plane. Let Az be the axis, which stands perpendicular to his plane at A. He can draw in his plane two lines to represent the two axes, Ax and Az. Let Fig. 2 be this drawing. Here the z axis has taken the place of the y axis, and the plane of Ax Az is represented in his plane. In this figure all that exists of the square ABCD will be the line AB.
His plane can only hold two axes. However, since it can hold two, he’s able to represent a turn into the third dimension by ignoring one of his axes and showing the third axis as lying in his plane. He can create a drawing in his plane of what stands up directly from his plane. Let Az be the axis that stands perpendicular to his plane at A. He can draw two lines in his plane to represent the two axes, Ax and Az. Let Fig. 2 be this drawing. Here, the z axis has replaced the y axis, and the plane of Ax Az is shown in his plane. In this figure, all that exists of the square ABCD will be the line AB.

The square extends from this line in the y direction, but more of that direction is represented in Fig. 2. The plane being can study the turning of the line AB in this diagram. It is simply a case of plane turning around the point A. The line AB occupies intermediate portions like AB1 and after half a revolution will lie on Ax produced through A.
The square extends from this line in the y direction, but more of that direction is shown in Fig. 2. The plane can explore how the line AB turns in this diagram. It’s just a matter of the plane rotating around the point A. The line AB takes up intermediate positions like AB1, and after half a turn, it will rest on Ax, extended through A.
Now, in the same way, the plane being can take another point, A´, and another line, A´B´, in his square. He can make the drawing of the two directions at A´, one along A´B´, the other perpendicular to his plane. He will obtain a figure precisely similar to Fig. 2, and will see that, as AB can turn around A, so A´C´ around A.
Now, similarly, the plane can take another point, A′, and another line, A'B', in his square. He can draw two directions at A: one along A'B', and the other perpendicular to his plane. He will create a figure that looks exactly like Fig. 2, and will notice that just as AB can rotate around A, A'C' can rotate around A.
In this turning AB and A´B´ would not interfere with each other, as they would if they moved in the plane around the separate points A and A´.
In this situation, AB and A'B' wouldn't overlap, unlike if they moved in the plane around the individual points A and A'.
Hence the plane being would conclude that a rotation round a line was possible. He could see his square as it[Pg 210] began to make this turning. He could see it half way round when it came to lie on the opposite side of the line AC. But in intermediate portions he could not see it, for it runs out of the plane.
Hence, the being in the plane would conclude that rotating around a line was possible. He could see his square as it[Pg 210] started to turn. He could see it halfway around when it ended up on the opposite side of the lineAC. But in the intermediate phases, he couldn't see it, because it goes out of the plane.
Coming now to the question of a four-dimensional body, let us conceive of it as a series of cubic sections, the first in our space, the rest at intervals, stretching away from our space in the unknown direction.
Coming now to the question of a four-dimensional body, let’s imagine it as a series of cubic sections, the first in our space, and the others at intervals, extending away from our space in an unknown direction.
We must not think of a four-dimensional body as formed by moving a three-dimensional body in any direction which we can see.
We shouldn't think of a four-dimensional object as being created by moving a three-dimensional object in any direction we can see.
Refer for a moment to Fig. 3. The point A, moving to the right, traces out the line AC. The line AC, moving away in a new direction, traces out the square ACEG at the base of the cube. The square AEGC, moving in a new direction, will trace out the cube ACEGBDHF. The vertical direction of this last motion is not identical with any motion possible in the plane of the base of the cube. It is an entirely new direction, at right angles to every line that can be drawn in the base. To trace out a tesseract the cube must move in a new direction—a direction at right angles to any and every line that can be drawn in the space of the cube.
Refer for a moment to Fig. 3. The point A, moving to the right, traces out the line AC. The line AC, moving away in a new direction, traces out the square ACEG at the base of the cube. The square AEGC, moving in a new direction, will trace out the cube ACEGBDHF. The vertical direction of this last motion is not the same as any motion possible in the plane of the base of the cube. It is an entirely new direction, at right angles to every line that can be drawn in the base. To trace out a tesseract, the cube must move in a new direction—a direction at right angles to any and every line that can be drawn in the space of the cube.
The cubic sections of the tesseract are related to the cube we see, as the square sections of the cube are related to the square of its base which a plane being sees.
The cubic sections of the tesseract are connected to the cube we see, just as the square sections of the cube relate to the square of its base that a flat surface perceives.
Let us imagine the cube in our space, which is the base of a tesseract, to turn about one of its edges. The rotation will carry the whole body with it, and each of the cubic sections will rotate. The axis we see in our space will remain unchanged, and likewise the series of axes parallel to it about which each of the parallel cubic sections rotates. The assemblage of all of these is a plane.
Let’s picture a cube in our space that forms the base of a tesseract, spinning around one of its edges. As it rotates, the entire shape moves with it, and each of the cubic sections also spins. The axis we see in our space will stay the same, just like the group of axes parallel to it around which each of the parallel cubic sections rotates. All of these together form a plane.
Hence in four dimensions a body rotates about a plane. There is no such thing as rotation round an axis.
Hence in four dimensions, a body rotates around a plane. There is no such thing as rotation around an axis.
[Pg 211]
[Pg 211]
We may regard the rotation from a different point of view. Consider four independent axes each at right angles to all the others, drawn in a four-dimensional body. Of these four axes we can see any three. The fourth extends normal to our space.
We can look at the rotation from another perspective. Imagine four independent axes, each at right angles to the others, positioned in a four-dimensional space. From these four axes, we can observe any three. The fourth one extends perpendicularly to our space.
Rotation is the turning of one axis into a second, and the second turning to take the place of the negative of the first. It involves two axes. Thus, in this rotation of a four-dimensional body, two axes change and two remain at rest. Four-dimensional rotation is therefore a turning about a plane.
Rotation is the turning of one axis into another, and the second axis takes the place of the opposite of the first. It involves two axes. So, in this rotation of a four-dimensional object, two axes change while two stay still. Therefore, four-dimensional rotation is a turning around a plane.
As in the case of a plane being, the result of rotation about a line would appear as the production of a looking-glass image of the original object on the other side of the line, so to us the result of a four-dimensional rotation would appear like the production of a looking-glass image of a body on the other side of a plane. The plane would be the axis of the rotation, and the path of the body between its two appearances would be unimaginable in three-dimensional space.
As with a plane, the outcome of rotating around a line would look like creating a mirror image of the original object on the opposite side of the line. Similarly, for us, the result of a four-dimensional rotation would seem like creating a mirror image of a body on the other side of a plane. The plane would serve as the axis of rotation, and the movement of the body between its two appearances would be beyond our comprehension in three-dimensional space.

Let us now apply the method by which a plane being could examine the nature of rotation about a line in our examination of rotation about a plane. Fig. 3 represents a cube in our space, the three axes x, y, z denoting its three dimensions. Let w represent the fourth dimension. Now, since in our space we can represent any three dimensions, we can, if we choose, make a representation of what is in the space determined by the three axes x, z, w. This is a three-dimensional space determined by two of the axes we have drawn, x and z, and in place of y the fourth axis, w. We cannot, keeping x and z, have both y and w in our space;[Pg 212] so we will let y go and draw w in its place. What will be our view of the cube?
Let’s now use the method where a being in a plane can look at the nature of rotation around a line in our study of rotation around a plane. Fig. 3 shows a cube in our space, with the three axes x, y, z representing its three dimensions. Let’s use w to represent the fourth dimension. Since we can represent any three dimensions in our space, we can choose to show what exists in the space defined by the three axes x, z, and w. This forms a three-dimensional space defined by two of the axes we’ve drawn, x and z, while using the fourth axis, w, instead of y. We cannot have both y and w in our space while keeping x and z; [Pg 212] so we will eliminate y and include w in its place. What will our view of the cube be?

Evidently we shall have simply the square that is in the plane of xz, the square ACDB. The rest of the cube stretches in the y direction, and, as we have none of the space so determined, we have only the face of the cube. This is represented in fig. 4.
Evidently, we will only have the square that sits in the xz plane, the square ACDB. The rest of the cube extends in the y direction, and since we don't have any of the space defined, we're only left with the face of the cube. This is shown in fig. 4.
Now, suppose the whole cube to be turned from the x to the w direction. Conformably with our method, we will not take the whole of the cube into consideration at once, but will begin with the face ABCD.
Now, let’s imagine the entire cube being rotated from the x direction to the w direction. Following our approach, we won’t look at the entire cube all at once; instead, we’ll start with the face ABCD.

Let this face begin to turn. Fig. 5 represents one of the positions it will occupy; the line AB remains on the z axis. The rest of the face extends between the x and the w direction.
Let this face start to turn. Fig. 5 represents one of the positions it will take; the line AB stays on the z axis. The rest of the face stretches between the x and w directions.
Now, since we can take any three axes, let us look at what lies in the space of zyw, and examine the turning there. We must now let the z axis disappear and let the w axis run in the direction in which the z ran.
Now that we can choose any three axes, let's examine what exists in the space of zyw and look at the movement in that area. We need to eliminate the z axis and allow the w axis to extend in the same direction that the z axis used to occupy.

Making this representation, what do we see of the cube? Obviously we see only the lower face. The rest of the cube lies in the space of xyz. In the space of xyz we have merely the base of the cube lying in the plane of xy, as shown in fig. 6.
Making this representation, what do we see of the cube? Clearly, we can only see the bottom face. The rest of the cube is in the space of xyz. In the space of xyz, we only have the base of the cube sitting in the xy plane, as shown in fig. 6.
Now let the x to w turning take place. The square ACEG will turn about the line AE. This edge will remain along the y axis and will be stationary, however far the square turns.
Now let the x to w rotation happen. The square ACEG will rotate around the line AE. This edge will stay along the y axis and will not move, no matter how far the square rotates.
[Pg 213]
[Pg 213]

Thus, if the cube be turned by an x to w turning, both the edge AB and the edge AC remain stationary; hence the whole face ABEF in the yz plane remains fixed. The turning has taken place about the face ABEF.
Thus, if the cube is rotated by an x to w turning, both the edge AB and the edge AC stay in place; therefore, the entire face ABEF in the yz plane remains fixed. The rotation occurs around the face ABEF.

We can think of this turning as a turning of the face ABCD about AB, and a turning of each section parallel to ABCD round the vertical line in which it intersects the face ABEF, the space in which the turning takes place being a different one from that in which the cube lies.
We can think of this rotation as a turning of the face ABCD around AB, and a turning of each section parallel to ABCD around the vertical line where it intersects the face ABEF. The area where the rotation occurs is different from where the cube is located.
One of the conditions, then, of our inquiry in the direction of the infinitely small is that we form the conception of a rotation about a plane. The production of a body in a state in which it presents the appearance of a looking-glass image of its former state is the criterion for a four-dimensional rotation.
One of the requirements for our exploration into the infinitely small is that we imagine a rotation around a plane. The creation of a body that looks like a mirror image of its previous state is the standard for a four-dimensional rotation.
There is some evidence for the occurrence of such transformations of bodies in the change of bodies from those which produce a right-handed polarisation of light to those which produce a left-handed polarisation; but this is not a point to which any very great importance can be attached.
There is some evidence for the occurrence of such transformations of bodies when they change from those that produce right-handed polarization of light to those that produce left-handed polarization; however, this is not a matter of significant importance.
Still, in this connection, let me quote a remark from[Pg 214] Prof. John G. McKendrick’s address on Physiology before the British Association at Glasgow. Discussing the possibility of the hereditary production of characteristics through the material structure of the ovum, he estimates that in it there exist 12,000,000,000 biophors, or ultimate particles of living matter, a sufficient number to account for hereditary transmission, and observes: “Thus it is conceivable that vital activities may also be determined by the kind of motion that takes place in the molecules of that which we speak of as living matter. It may be different in kind from some of the motions known to physicists, and it is conceivable that life may be the transmission to dead matter, the molecules of which have already a special kind of motion, of a form of motion sui generis.”
Still, in this context, let me quote a remark from[Pg 214] Prof. John G. McKendrick’s address on Physiology before the British Association at Glasgow. Discussing the possibility of hereditary characteristics being passed on through the material structure of the ovum, he estimates that it contains 12,000,000,000 biophors, or ultimate particles of living matter, which is enough to explain hereditary transmission. He notes: “Thus it is conceivable that vital activities may also be influenced by the type of motion occurring in the molecules of what we refer to as living matter. This motion may differ from some of the motions recognized by physicists, and it’s possible that life could be the transmission to non-living matter, which already exhibits a specific type of motion, of a unique form of motion.”
Now, in the realm of organic beings symmetrical structures—those with a right and left symmetry—are everywhere in evidence. Granted that four dimensions exist, the simplest turning produces the image form, and by a folding-over structures could be produced, duplicated right and left, just as is the case of symmetry in a plane.
Now, in the world of living things, symmetrical structures—ones with right and left symmetry—are everywhere to be seen. Given that four dimensions exist, the simplest rotation creates the image shape, and through a process of folding, structures could be formed, mirrored right and left, similar to symmetry in a plane.
Thus one very general characteristic of the forms of organisms could be accounted for by the supposition that a four-dimensional motion was involved in the process of life.
Thus, one very general characteristic of the forms of organisms could be explained by the assumption that a four-dimensional motion was involved in the process of life.
But whether four-dimensional motions correspond in other respects to the physiologist’s demand for a special kind of motion, or not, I do not know. Our business is with the evidence for their existence in physics. For this purpose it is necessary to examine into the significance of rotation round a plane in the case of extensible and of fluid matter.
But I’m not sure if four-dimensional motions also meet the physiologist’s requirement for a specific kind of motion. Our focus is on the evidence of their existence in physics. To do this, we need to look into the importance of rotation around a plane when it comes to both extensible and fluid materials.
Let us dwell a moment longer on the rotation of a rigid body. Looking at the cube in fig. 3, which turns about[Pg 215] the face of ABFE, we see that any line in the face can take the place of the vertical and horizontal lines we have examined. Take the diagonal line AF and the section through it to GH. The portions of matter which were on one side of AF in this section in fig. 3 are on the opposite side of it in fig. 8. They have gone round the line AF. Thus the rotation round a face can be considered as a number of rotations of sections round parallel lines in it.
Let’s focus a bit longer on the rotation of a solid object. Looking at the cube in fig. 3, which spins around the face of ABFE, we can see that any line on this face can replace the vertical and horizontal lines we've discussed. Take the diagonal line AF and the section through it to GH. The parts of the material that were on one side of AF in this section in fig. 3 are now on the opposite side in fig. 8. They have rotated around the line AF. So, rotating around a face can be seen as several rotations of sections around parallel lines within it.
The turning about two different lines is impossible in three-dimensional space. To take another illustration, suppose A and B are two parallel lines in the xy plane, and let CD and EF be two rods crossing them. Now, in the space of xyz if the rods turn round the lines A and B in the same direction they will make two independent circles.
The turning of two different lines is impossible in three-dimensional space. To illustrate this, imagine A and B as two parallel lines in the xy plane, and let CD and EF be two rods crossing them. Now, in the xyz space, if the rods rotate around the lines A and B in the same direction, they will form two independent circles.

When the end F is going down the end C will be coming up. They will meet and conflict.
When the end F is going down, the end C will be coming up. They will intersect and clash.
But if we rotate the rods about the plane of AB by the z to w rotation these movements will not conflict. Suppose all the figure removed with the exception of the plane xz, and from this plane draw the axis of w, so that we are looking at the space of xzw.
But if we rotate the rods around the plane of AB using the z to w rotation, these movements won’t interfere with each other. Let’s say we remove everything except for the plane xz, and from this plane, we draw the axis of w, so that we are looking at the space of xzw.
Here, fig. 10, we cannot see the lines A and B. We see the points G and H, in which A and B intercept the x axis, but we cannot see the lines themselves, for they run in the y direction, and that is not in our drawing.
Here, fig. 10, we can’t see the lines A and B. We see the points G and H, where A and B intersect the x axis, but we can’t see the lines themselves because they run in the y direction, which isn’t part of our drawing.
Now, if the rods move with the z to w rotation they will[Pg 216] turn in parallel planes, keeping their relative positions. The point D, for instance, will describe a circle. At one time it will be above the line A, at another time below it. Hence it rotates round A.
Now, if the rods rotate from z to w, they will[Pg 216] move in parallel planes while maintaining their relative positions. The point D, for example, will trace a circle. At one moment, it will be above the line A, and at another moment, below it. So, it rotates around A.

Not only two rods but any number of rods crossing the plane will move round it harmoniously. We can think of this rotation by supposing the rods standing up from one line to move round that line and remembering that it is not inconsistent with this rotation for the rods standing up along another line also to move round it, the relative positions of all the rods being preserved. Now, if the rods are thick together, they may represent a disk of matter, and we see that a disk of matter can rotate round a central plane.
Not just two rods, but any number of rods crossing the plane will rotate around it smoothly. We can visualize this rotation by imagining the rods upright from one line moving around that line, and it's important to note that it's completely fine for the rods positioned along a different line to rotate around it too, while still keeping their relative positions. Now, if the rods are closely packed, they can represent a disk of matter, and we can see that a disk of matter can rotate around a central plane.
Rotation round a plane is exactly analogous to rotation round an axis in three dimensions. If we want a rod to turn round, the ends must be free; so if we want a disk of matter to turn round its central plane by a four-dimensional turning, all the contour must be free. The whole contour corresponds to the ends of the rod. Each point of the contour can be looked on as the extremity of an axis in the body, round each point of which there is a rotation of the matter in the disk.
Rotation around a plane is exactly like rotation around an axis in three dimensions. If we want a rod to spin, the ends need to be free; similarly, if we want a disk of matter to rotate around its central plane in a four-dimensional way, the entire contour must be free. The whole contour is like the ends of the rod. Each point on the contour can be seen as the end of an axis within the body, around which the matter in the disk rotates.
If the one end of a rod be clamped, we can twist the rod, but not turn it round; so if any part of the contour of a disk is clamped we can impart a twist to the disk, but not turn it round its central plane. In the case of extensible materials a long, thin rod will twist round its axis, even when the axis is curved, as, for instance, in the case of a ring of India rubber.
If one end of a rod is clamped, we can twist the rod but not rotate it; similarly, if any part of the edge of a disk is clamped, we can twist the disk but not spin it around its central plane. For stretchy materials, a long, thin rod will twist around its axis, even if that axis is curved, as in the case of a rubber ring.
[Pg 217]
[Pg 217]
In an analogous manner, in four dimensions we can have rotation round a curved plane, if I may use the expression. A sphere can be turned inside out in four dimensions.
In a similar way, in four dimensions we can have rotation around a curved plane, if that's the right term to use. A sphere can be flipped inside out in four dimensions.

Let fig. 11 represent a spherical surface, on each side of which a layer of matter exists. The thickness of the matter is represented by the rods CD and EF, extending equally without and within.
Let fig. 11 represent a spherical surface, on each side of which there is a layer of matter. The thickness of the matter is represented by the rods CD and EF, extending equally outward and inward.
Now, take the section of the sphere by the yz plane we have a circle—fig. 12. Now, let the w axis be drawn in place of the x axis so that we have the space of yzw represented. In this space all that there will be seen of the sphere is the circle drawn.
Now, when we look at the part of the sphere cut by the yz plane, we see a circle—fig. 12. Next, let’s draw the w axis instead of the x axis so that we represent the yzw space. In this space, all that will be visible of the sphere is the drawn circle.

Here we see that there is no obstacle to prevent the rods turning round. If the matter is so elastic that it will give enough for the particles at E and C to be separated as they are at F and D, they can rotate round to the position D and F, and a similar motion is possible for all other particles. There is no matter or obstacle to prevent them from moving out in the w direction, and then on round the circumference as an axis. Now, what will hold for one section will hold for[Pg 218] all, as the fourth dimension is at right angles to all the sections which can be made of the sphere.
Here, we can see that there are no barriers preventing the rods from rotating. If the material is flexible enough for the particles at E and C to separate like they do at F and D, they can rotate into the positions D and F. A similar movement is also possible for all other particles. There’s nothing preventing them from shifting outward in the w direction, then rotating around the circumference like an axis. What applies to one section applies to all, since the fourth dimension is perpendicular to all the sections that can be created from the sphere.
We have supposed the matter of which the sphere is composed to be three-dimensional. If the matter had a small thickness in the fourth dimension, there would be a slight thickness in fig. 12 above the plane of the paper—a thickness equal to the thickness of the matter in the fourth dimension. The rods would have to be replaced by thin slabs. But this would make no difference as to the possibility of the rotation. This motion is discussed by Newcomb in the first volume of the American Journal of Mathematics.
We assumed the material that makes up the sphere is three-dimensional. If the material had a small thickness in the fourth dimension, there would be a slight thickness in fig. 12 above the plane of the paper—a thickness equal to that of the material in the fourth dimension. The rods would need to be replaced with thin slabs. However, this wouldn’t change the possibility of rotation. This motion is discussed by Newcomb in the first volume of the American Journal of Mathematics.
Let us now consider, not a merely extensible body, but a liquid one. A mass of rotating liquid, a whirl, eddy, or vortex, has many remarkable properties. On first consideration we should expect the rotating mass of liquid immediately to spread off and lose itself in the surrounding liquid. The water flies off a wheel whirled round, and we should expect the rotating liquid to be dispersed. But see the eddies in a river strangely persistent. The rings that occur in puffs of smoke and last so long are whirls or vortices curved round so that their opposite ends join together. A cyclone will travel over great distances.
Let’s now think about a liquid instead of just a solid object. A mass of rotating liquid, like a whirlpool, eddy, or vortex, has some fascinating qualities. At first glance, we might expect that the rotating liquid would quickly spread out and mix with the surrounding liquid. Just like how water flies off a spinning wheel, we might assume the rotating liquid would be dispersed. But consider the eddies in a river—they're surprisingly persistent. The rings formed by puffs of smoke last for a long time; they are whirls or vortices curved around so that their ends connect. A cyclone can travel great distances.
Helmholtz was the first to investigate the properties of vortices. He studied them as they would occur in a perfect fluid—that is, one without friction of one moving portion or another. In such a medium vortices would be indestructible. They would go on for ever, altering their shape, but consisting always of the same portion of the fluid. But a straight vortex could not exist surrounded entirely by the fluid. The ends of a vortex must reach to some boundary inside or outside the fluid.
Helmholtz was the first to look into the properties of vortices. He examined them as they would appear in a perfect fluid—meaning one without friction between any moving parts. In such a medium, vortices would be everlasting. They would continue indefinitely, changing shape but always made up of the same portion of the fluid. However, a straight vortex couldn’t exist completely surrounded by the fluid. The ends of a vortex must connect to some boundary, whether inside or outside the fluid.
A vortex which is bent round so that its opposite ends join is capable of existing, but no vortex has a free end in[Pg 219] the fluid. The fluid round the vortex is always in motion, and one produces a definite movement in another.
A vortex can curve around so that its ends connect, and it can exist like that, but no vortex has an open end in the fluid. The fluid surrounding the vortex is always moving, and one creates a definite movement in another. [Pg 219]
Lord Kelvin has proposed the hypothesis that portions of a fluid segregated in vortices account for the origin of matter. The properties of the ether in respect of its capacity of propagating disturbances can be explained by the assumption of vortices in it instead of by a property of rigidity. It is difficult to conceive, however, of any arrangement of the vortex rings and endless vortex filaments in the ether.
Lord Kelvin proposed the hypothesis that parts of a fluid organized in vortices are responsible for the origin of matter. The characteristics of the ether regarding its ability to transmit disturbances can be explained by assuming the presence of vortices within it rather than by a property of rigidity. However, it's difficult to imagine any arrangement of the vortex rings and infinite vortex filaments within the ether.
Now, the further consideration of four-dimensional rotations shows the existence of a kind of vortex which would make an ether filled with a homogeneous vortex motion easily thinkable.
Now, looking deeper into four-dimensional rotations reveals the presence of a type of vortex that makes imagining an ether filled with a uniform vortex motion quite feasible.
To understand the nature of this vortex, we must go on and take a step by which we accept the full significance of the four-dimensional hypothesis. Granted four-dimensional axes, we have seen that a rotation of one into another leaves two unaltered, and these two form the axial plane about which the rotation takes place. But what about these two? Do they necessarily remain motionless? There is nothing to prevent a rotation of these two, one into the other, taking place concurrently with the first rotation. This possibility of a double rotation deserves the most careful attention, for it is the kind of movement which is distinctly typical of four dimensions.
To understand this vortex, we need to take a step that fully embraces the significance of the four-dimensional theory. With four-dimensional axes established, we can see that a rotation from one axis to another keeps two axes unchanged, and these two create the axial plane around which the rotation occurs. But what about these two? Do they have to stay still? There's nothing stopping a rotation of these two axes into each other from happening at the same time as the first rotation. This potential for a double rotation warrants serious consideration, as it represents a type of movement that is characteristic of four dimensions.
Rotation round a plane is analogous to rotation round an axis. But in three-dimensional space there is no motion analogous to the double rotation, in which, while axis 1 changes into axis 2, axis 3 changes into axis 4.
Rotation around a plane is similar to rotation around an axis. However, in three-dimensional space, there is no movement that corresponds to a double rotation, where axis 1 transforms into axis 2 while axis 3 transforms into axis 4.
Consider a four-dimensional body, with four independent axes, x, y, z, w. A point in it can move in only one direction at a given moment. If the body has a velocity of rotation by which the x axis changes into the y axis[Pg 220] and all parallel sections move in a similar manner, then the point will describe a circle. If, now, in addition to the rotation by which the x axis changes into the y axis the body has a rotation by which the z axis turns into the w axis, the point in question will have a double motion in consequence of the two turnings. The motions will compound, and the point will describe a circle, but not the same circle which it would describe in virtue of either rotation separately.
Consider a four-dimensional shape, with four independent axes, x, y, z, w. A point within it can only move in one direction at any given moment. If the shape rotates such that the x axis turns into the y axis[Pg 220] and all parallel sections move similarly, then the point will trace out a circle. Now, if, in addition to the rotation that transforms the x axis into the y axis, the shape also rotates such that the z axis changes into the w axis, the point will experience double motion due to these two rotations. The movements will combine, and the point will trace a circle, but it won't be the same circle it would create from either rotation alone.
We know that if a body in three-dimensional space is given two movements of rotation they will combine into a single movement of rotation round a definite axis. It is in no different condition from that in which it is subjected to one movement of rotation. The direction of the axis changes; that is all. The same is not true about a four-dimensional body. The two rotations, x to y and z to w, are independent. A body subject to the two is in a totally different condition to that which it is in when subject to one only. When subject to a rotation such as that of x to y, a whole plane in the body, as we have seen, is stationary. When subject to the double rotation no part of the body is stationary except the point common to the two planes of rotation.
We know that in three-dimensional space, if an object undergoes two rotations, they will combine into a single rotation around a specific axis. It’s in the same state as it would be with just one rotation. The only difference is the direction of the axis. This is not the case for a four-dimensional object. The two rotations, x to y and z to w, are independent. An object experiencing both is in a completely different state than if it were subjected to just one. When experiencing a rotation like x to y, a whole plane in the object remains stationary. However, during the double rotation, no part of the object is stationary except for the point where the two rotation planes intersect.
If the two rotations are equal in velocity, every point in the body describes a circle. All points equally distant from the stationary point describe circles of equal size.
If the two rotations are the same speed, every point in the body moves in a circle. All points that are the same distance from the stationary point trace out circles of the same size.
We can represent a four-dimensional sphere by means of two diagrams, in one of which we take the three axes, x, y, z; in the other the axes x, w, and z. In fig. 13 we have the view of a four-dimensional sphere in the space of xyz. Fig. 13 shows all that we can see of the four sphere in the space of xyz, for it represents all the points in that space, which are at an equal distance from the centre.
We can illustrate a four-dimensional sphere using two diagrams: one with the three axes, x, y, z, and the other with the axes x, w, and z. In fig. 13, we have a view of the four-dimensional sphere in the xyz space. Fig. 13 shows everything visible of the four-sphere in xyz space, as it represents all the points in that space that are equally distant from the center.
Let us now take the xz section, and let the axis of w[Pg 221] take the place of the y axis. Here, in fig. 14, we have the space of xzw. In this space we have to take all the points which are at the same distance from the centre, consequently we have another sphere. If we had a three-dimensional sphere, as has been shown before, we should have merely a circle in the xzw space, the xz circle seen in the space of xzw. But now, taking the view in the space of xzw, we have a sphere in that space also. In a similar manner, whichever set of three axes we take, we obtain a sphere.
Let’s now look at the xz section, with the w axis replacing the y axis. Here, in fig. 14, we have the xzw space. In this space, we need to consider all the points that are the same distance from the center, which gives us another sphere. If we had a three-dimensional sphere, as previously shown, we would only have a circle in the xzw space, specifically the xz circle viewed in the xzw space. But now, from the perspective of the xzw space, we also have a sphere in that space. Similarly, no matter which set of three axes we choose, we end up with a sphere.

Fig. 13 (141).

Fig. 14 (142).
In fig. 13, let us imagine the rotation in the direction xy to be taking place. The point x will turn to y, and p to p´. The axis zz´ remains stationary, and this axis is all of the plane zw which we can see in the space section exhibited in the figure.
In fig. 13, let’s picture the rotation happening in the direction of xy. The point x will move to y, and p will change to p´. The axis zz´ stays still, and this axis represents the entire zw plane that we can see in the space section shown in the figure.
In fig. 14, imagine the rotation from z to w to be taking place. The w axis now occupies the position previously occupied by the y axis. This does not mean that the w axis can coincide with the y axis. It indicates that we are looking at the four-dimensional sphere from a different point of view. Any three-space view will show us three axes, and in fig. 14 we are looking at xzw.
In fig. 14, imagine the rotation from z to w happening now. The w axis is now in the place where the y axis used to be. This doesn’t mean that the w axis can be the same as the y axis. It shows that we are viewing the four-dimensional sphere from a different perspective. Any view in three-dimensional space will show us three axes, and in fig. 14, we are looking at xzw.
The only part that is identical in the two diagrams is the circle of the x and z axes, which axes are contained in both diagrams. Thus the plane zxz´ is the same in both, and the point p represents the same point in both[Pg 222] diagrams. Now, in fig. 14 let the zw rotation take place, the z axis will turn toward the point w of the w axis, and the point p will move in a circle about the point x.
The only part that is the same in the two diagrams is the circle formed by the x and z axes, which are present in both diagrams. Therefore, the plane zxz´ is identical in both, and the point p represents the same point in both[Pg 222] diagrams. Now, in fig. 14, let the zw rotation happen; the z axis will rotate toward the point w of the w axis, and the point p will move in a circle around the point x.
Now, suppose both of these independent rotations compounded, the point p will move in a circle, but this circle will coincide with neither of the circles in which either one of the rotations will take it. The circle the point p will move in will depend on its position on the surface of the four sphere.
Now, imagine both of these independent rotations happening at the same time; the point p will move in a circle, but this circle won’t match either of the circles from the individual rotations. The circle that point p moves in will depend on where it is located on the surface of the four-sphere.
In this double rotation, possible in four-dimensional space, there is a kind of movement totally unlike any with which we are familiar in three-dimensional space. It is a requisite preliminary to the discussion of the behaviour of the small particles of matter, with a view to determining whether they show the characteristics of four-dimensional movements, to become familiar with the main characteristics of this double rotation. And here I must rely on a formal and logical assent rather than on the intuitive apprehension, which can only be obtained by a more detailed study.
In this double rotation, which can happen in four-dimensional space, there's a type of movement that's completely different from anything we know in three-dimensional space. Before discussing how small particles of matter behave to see if they exhibit four-dimensional movements, it's important to understand the main features of this double rotation. For now, I have to depend on a formal and logical agreement rather than on an intuitive understanding, which can only come from a more in-depth study.
In the first place this double rotation consists in two varieties or kinds, which we will call the A and B kinds. Consider four axes, x, y, z, w. The rotation of x to y can be accompanied with the rotation of z to w. Call this the A kind.
In the beginning, this double rotation consists of two types, which we’ll refer to as type A and type B. Let’s look at four axes, x, y, z, and w. The rotation of x to y can happen simultaneously with the rotation of z to w. We’ll call this type A.
But also the rotation of x to y can be accompanied by the rotation, of not z to w, but w to z. Call this the B kind.
But the rotation of x to y can also be accompanied by the rotation of not z to w, but w to z. Let's call this the B kind.
They differ in only one of the component rotations. One is not the negative of the other. It is the semi-negative. The opposite of an x to y, z to w rotation would be y to x, w to z. The semi-negative is x to y and w to z.
They differ in just one of the rotations. One is not the opposite of the other. It’s the semi-opposite. The opposite of an x to y, z to w rotation would be y to x, w to z. The semi-opposite is x to y and w to z.
[Pg 223]
[Pg 223]
If four dimensions exist and we cannot perceive them, because the extension of matter is so small in the fourth dimension that all movements are withheld from direct observation except those which are three-dimensional, we should not observe these double rotations, but only the effects of them in three-dimensional movements of the type with which we are familiar.
If four dimensions exist and we can’t perceive them, because the size of matter in the fourth dimension is so tiny that all movements are beyond our direct observation except for those in three dimensions, we wouldn’t see these double rotations, but only the effects of them in the three-dimensional movements we’re used to.
If matter in its small particles is four-dimensional, we should expect this double rotation to be a universal characteristic of the atoms and molecules, for no portion of matter is at rest. The consequences of this corpuscular motion can be perceived, but only under the form of ordinary rotation or displacement. Thus, if the theory of four dimensions is true, we have in the corpuscles of matter a whole world of movement, which we can never study directly, but only by means of inference.
If matter is made up of tiny particles that are four-dimensional, we should expect this double rotation to be a common trait of atoms and molecules, since no part of matter is completely still. We can observe the effects of this particle motion, but only as ordinary rotation or movement. So, if the four-dimensional theory is correct, there exists an entire world of motion within the particles of matter that we can never study directly, only through inference.
The rotation A, as I have defined it, consists of two equal rotations—one about the plane of zw, the other about the plane of xy. It is evident that these rotations are not necessarily equal. A body may be moving with a double rotation, in which these two independent components are not equal; but in such a case we can consider the body to be moving with a composite rotation—a rotation of the A or B kind and, in addition, a rotation about a plane.
The rotation A, as I've defined it, is made up of two equal rotations—one around the plane of zw and the other around the plane of xy. It's clear that these rotations don’t have to be equal. An object can be moving with a double rotation, where these two independent components are not equal; however, in that scenario, we can think of the object as having a composite rotation—a rotation of the A or B type, along with an additional rotation around a plane.
If we combine an A and a B movement, we obtain a rotation about a plane; for, the first being x to y and z to w, and the second being x to y and w to z, when they are put together the z to w and w to z rotations neutralise each other, and we obtain an x to y rotation only, which is a rotation about the plane of zw. Similarly, if we take a B rotation, y to x and z to w, we get, on combining this with the A rotation, a rotation of z to w about the xy plane. In this case the plane of rotation is in the three-dimensional space of xyz, and we have—what has[Pg 224] been described before—a twisting about a plane in our space.
If we combine an A movement and a B movement, we get a rotation around a plane; since the first is x to y and z to w, and the second is x to y and w to z, when they come together, the z to w and w to z rotations cancel each other out, leaving us with only an x to y rotation, which is a rotation around the zw plane. Similarly, if we take a B rotation, y to x and z to w, by combining this with the A rotation, we achieve a rotation of z to w around the xy plane. In this case, the plane of rotation is in the three-dimensional space of xyz, and we have—what has[Pg 224] been described before—a twisting around a plane in our space.
Consider now a portion of a perfect liquid having an A motion. It can be proved that it possesses the properties of a vortex. It forms a permanent individuality—a separated-out portion of the liquid—accompanied by a motion of the surrounding liquid. It has properties analogous to those of a vortex filament. But it is not necessary for its existence that its ends should reach the boundary of the liquid. It is self-contained and, unless disturbed, is circular in every section.
Consider now a part of a flawless liquid exhibiting an A motion. It can be shown that it has the characteristics of a vortex. It creates a distinct identity—a separate section of the liquid—along with the movement of the surrounding liquid. It has features similar to those of a vortex filament. However, its existence does not require its ends to connect to the boundary of the liquid. It is self-contained and, unless disrupted, is circular in every cross-section.

If we suppose the ether to have its properties of transmitting vibration given it by such vortices, we must inquire how they lie together in four-dimensional space. Placing a circular disk on a plane and surrounding it by six others, we find that if the central one is given a motion of rotation, it imparts to the others a rotation which is antagonistic in every two adjacent ones. If A goes round, as shown by the arrow, B and C will be moving in opposite ways, and each tends to destroy the motion of the other.
If we assume that the ether has the ability to transmit vibrations due to these vortices, we need to explore how they are arranged in four-dimensional space. When we place a circular disk on a plane and surround it with six others, we notice that if the central disk rotates, it causes the surrounding disks to rotate in opposite directions for every pair of adjacent disks. If A rotates as indicated by the arrow, B and C will rotate in opposite directions, and each one tends to counteract the motion of the other.
Now, if we suppose spheres to be arranged in a corresponding manner in three-dimensional space, they will be grouped in figures which are for three-dimensional space what hexagons are for plane space. If a number of spheres of soft clay be pressed together, so as to fill up the interstices, each will assume the form of a fourteen-sided figure called a tetrakaidecagon.
Now, if we imagine spheres arranged in a similar way in three-dimensional space, they will cluster in shapes that are to three-dimensional space what hexagons are to flat space. If several soft clay spheres are pressed together to fill the gaps, each will take on the shape of a fourteen-sided figure called a tetrakaidecagon.
Now, assuming space to be filled with such tetrakaidecagons, and placing a sphere in each, it will be found[Pg 225] that one sphere is touched by eight others. The remaining six spheres of the fourteen which surround the central one will not touch it, but will touch three of those in contact with it. Hence, if the central sphere rotates, it will not necessarily drive those around it so that their motions will be antagonistic to each other, but the velocities will not arrange themselves in a systematic manner.
Now, if we fill space with tetrakaidecagons and place a sphere in each of them, we will find[Pg 225] that one sphere comes into contact with eight others. The other six spheres out of the fourteen surrounding the central one will not actually touch it but will touch three of the spheres that are in contact with it. Therefore, if the central sphere rotates, it won’t necessarily cause those around it to move in ways that are opposing each other, but their speeds won't organize in a systematic way.
In four-dimensional space the figure which forms the next term of the series hexagon, tetrakaidecagon, is a thirty-sided figure. It has for its faces ten solid tetrakaidecagons and twenty hexagonal prisms. Such figures will exactly fill four-dimensional space, five of them meeting at every point. If, now, in each of these figures we suppose a solid four-dimensional sphere to be placed, any one sphere is surrounded by thirty others. Of these it touches ten, and, if it rotates, it drives the rest by means of these. Now, if we imagine the central sphere to be given an A or a B rotation, it will turn the whole mass of sphere round in a systematic manner. Suppose four-dimensional space to be filled with such spheres, each rotating with a double rotation, the whole mass would form one consistent system of motion, in which each one drove every other one, with no friction or lagging behind.
In four-dimensional space, the next figure in the series after hexagon and tetrakaidecagon is a thirty-sided shape. It has ten solid tetrakaidecagons for faces and twenty hexagonal prisms. These shapes can perfectly fill four-dimensional space, with five of them meeting at each point. Now, if we place a solid four-dimensional sphere in each of these shapes, each sphere will be surrounded by thirty others. It touches ten, and when it rotates, it moves the others through those points of contact. If we give the central sphere an A or B rotation, it will turn the entire cluster of spheres in a coordinated way. If we fill four-dimensional space with these spheres, each rotating with a double rotation, the entire system would move together, with each sphere driving the others, without any friction or delays.
Every sphere would have the same kind of rotation. In three-dimensional space, if one body drives another round the second body rotates with the opposite kind of rotation; but in four-dimensional space these four-dimensional spheres would each have the double negative of the rotation of the one next it, and we have seen that the double negative of an A or B rotation is still an A or B rotation. Thus four-dimensional space could be filled with a system of self-preservative living energy. If we imagine the four-dimensional spheres to be of liquid and not of solid matter, then, even if the liquid were not quite perfect and[Pg 226] there were a slight retarding effect of one vortex on another, the system would still maintain itself.
Every sphere would have the same type of rotation. In three-dimensional space, if one body revolves around another, the second body rotates in the opposite direction; but in four-dimensional space, these four-dimensional spheres would each have the opposite double rotation of the one next to it, and we have seen that the opposite double of an A or B rotation is still an A or B rotation. Therefore, four-dimensional space could be filled with a system of self-sustaining living energy. If we imagine the four-dimensional spheres as liquid rather than solid, then even if the liquid is not completely perfect and there is a slight slowing effect of one vortex on another, the system would still sustain itself.
In this hypothesis we must look on the ether as possessing energy, and its transmission of vibrations, not as the conveying of a motion imparted from without, but as a modification of its own motion.
In this hypothesis, we must view the ether as having energy, and its transmission of vibrations, not as carrying motion transferred from an external source, but as a change in its own motion.
We are now in possession of some of the conceptions of four-dimensional mechanics, and will turn aside from the line of their development to inquire if there is any evidence of their applicability to the processes of nature.
We now have some understanding of four-dimensional mechanics and will pause from discussing their development to explore whether there's any evidence of their relevance to natural processes.
Is there any mode of motion in the region of the minute which, giving three-dimensional movements for its effect, still in itself escapes the grasp of our mechanical theories? I would point to electricity. Through the labours of Faraday and Maxwell we are convinced that the phenomena of electricity are of the nature of the stress and strain of a medium; but there is still a gap to be bridged over in their explanation—the laws of elasticity, which Maxwell assumes, are not those of ordinary matter. And, to take another instance: a magnetic pole in the neighbourhood of a current tends to move. Maxwell has shown that the pressures on it are analogous to the velocities in a liquid which would exist if a vortex took the place of the electric current: but we cannot point out the definite mechanical explanation of these pressures. There must be some mode of motion of a body or of the medium in virtue of which a body is said to be electrified.
Is there any type of movement in the realm of the tiny that, while producing three-dimensional effects, still eludes our mechanical theories? I would suggest electricity. Thanks to the work of Faraday and Maxwell, we believe that the phenomena of electricity relate to the stress and strain in a medium; however, there’s still a gap in their explanation—the laws of elasticity that Maxwell refers to aren’t the same as those of ordinary matter. To give another example: a magnetic pole near an electric current tends to move. Maxwell has demonstrated that the forces acting on it are similar to the velocities in a liquid that would occur if a vortex replaced the electric current, but we can’t provide a clear mechanical explanation for these forces. There must be some form of motion in a body or in the medium that causes a body to be described as electrified.
Take the ions which convey charges of electricity 500 times greater in proportion to their mass than are carried by the molecules of hydrogen in electrolysis. In respect of what motion can these ions be said to be electrified? It can be shown that the energy they possess is not energy of rotation. Think of a short rod rotating. If it is turned over it is found to be rotating in the opposite[Pg 227] direction. Now, if rotation in one direction corresponds to positive electricity, rotation in the opposite direction corresponds to negative electricity, and the smallest electrified particles would have their charges reversed by being turned over—an absurd supposition.
Take the ions that carry electrical charges 500 times more in proportion to their mass than the molecules of hydrogen in electrolysis. Regarding which motion can these ions be considered electrified? It's clear that the energy they have is not rotational energy. Imagine a short rod spinning. If you flip it over, you'll see it's spinning in the opposite direction. Now, if rotation in one direction represents positive electricity, then rotation in the opposite direction represents negative electricity, meaning the smallest electrified particles would have their charges flipped by being turned over—an absurd idea.[Pg 227]
If we fix on a mode of motion as a definition of electricity, we must have two varieties of it, one for positive and one for negative; and a body possessing the one kind must not become possessed of the other by any change in its position.
If we define electricity by a type of motion, we need two kinds: one for positive and one for negative. An object that has one type shouldn’t suddenly have the other just because its position changes.
All three-dimensional motions are compounded of rotations and translations, and none of them satisfy this first condition for serving as a definition of electricity.
All three-dimensional movements are made up of rotations and translations, and none of them meet this first condition to define electricity.
But consider the double rotation of the A and B kinds. A body rotating with the A motion cannot have its motion transformed into the B kind by being turned over in any way. Suppose a body has the rotation x to y and z to w. Turning it about the xy plane, we reverse the direction of the motion x to y. But we also reverse the z to w motion, for the point at the extremity of the positive z axis is now at the extremity of the negative z axis, and since we have not interfered with its motion it goes in the direction of position w. Hence we have y to x and w to z, which is the same as x to y and z to w. Thus both components are reversed, and there is the A motion over again. The B kind is the semi-negative, with only one component reversed.
But think about the two types of rotation, A and B. A body rotating with the A motion can't be transformed into the B kind just by being flipped in any way. Let's say a body has the rotation from x to y and from z to w. If we turn it around the xy plane, we reverse the direction of the motion from x to y. However, we also reverse the motion from z to w because the point at the end of the positive z axis is now at the end of the negative z axis, and since we haven't changed its motion, it continues in the direction of position w. So now we have y to x and w to z, which is the same as x to y and z to w. Therefore, both components are reversed, and we end up back with the A motion. The B kind is the semi-negative, where only one component is reversed.
Hence a system of molecules with the A motion would not destroy it in one another, and would impart it to a body in contact with them. Thus A and B motions possess the first requisite which must be demanded in any mode of motion representative of electricity.
Hence, a system of molecules with the A motion would not disrupt each other and would transfer that motion to a body in contact with them. Thus, A and B motions have the first essential quality that any type of motion representing electricity must have.
Let us trace out the consequences of defining positive electricity as an A motion and negative electricity as a B motion. The combination of positive and negative[Pg 228] electricity produces a current. Imagine a vortex in the ether of the A kind and unite with this one of the B kind. An A motion and B motion produce rotation round a plane, which is in the ether a vortex round an axial surface. It is a vortex of the kind we represent as a part of a sphere turning inside out. Now such a vortex must have its rim on a boundary of the ether—on a body in the ether.
Let’s look at what happens when we define positive electricity as an A motion and negative electricity as a B motion. Combining positive and negative electricity creates a current. Picture a vortex in the ether of the A type, and then connect it with one of the B type. An A motion and a B motion create rotation around a plane, which in the ether is a vortex around an axial surface. It’s a vortex like we visualize as part of a sphere turning inside out. Now, this vortex must have its edge on a boundary of the ether—on a body within the ether.[Pg 228]
Let us suppose that a conductor is a body which has the property of serving as the terminal abutment of such a vortex. Then the conception we must form of a closed current is of a vortex sheet having its edge along the circuit of the conducting wire. The whole wire will then be like the centres on which a spindle turns in three-dimensional space, and any interruption of the continuity of the wire will produce a tension in place of a continuous revolution.
Let’s assume a conductor is an object that can act as the endpoint of a vortex. The idea we should have about a closed current is of a vortex sheet with its edge following the path of the conducting wire. The entire wire will act like the centers that a spindle rotates around in three-dimensional space, and any break in the continuity of the wire will create tension instead of a smooth rotation.
As the direction of the rotation of the vortex is from a three-space direction into the fourth dimension and back again, there will be no direction of flow to the current; but it will have two sides, according to whether z goes to w or z goes to negative w.
As the vortex rotates from a three-dimensional space into the fourth dimension and back again, there won’t be a specific flow direction for the current; instead, it will have two sides, depending on whether z goes to w or z goes to negative w.
We can draw any line from one part of the circuit to another; then the ether along that line is rotating round its points.
We can draw any line from one part of the circuit to another; then the ether along that line is rotating around its points.
This geometric image corresponds to the definition of an electric circuit. It is known that the action does not lie in the wire, but in the medium, and it is known that there is no direction of flow in the wire.
This geometric image represents the definition of an electric circuit. It's understood that the action isn't in the wire, but in the medium, and it's understood that there isn't a direction of flow within the wire.
No explanation has been offered in three-dimensional mechanics of how an action can be impressed throughout a region and yet necessarily run itself out along a closed boundary, as is the case in an electric current. But this phenomenon corresponds exactly to the definition of a four-dimensional vortex.
No explanation has been provided in three-dimensional mechanics for how an action can be applied throughout a region and still ultimately flow along a closed boundary, as seen in an electric current. However, this phenomenon matches precisely with the definition of a four-dimensional vortex.
[Pg 229]
[Pg 229]
If we take a very long magnet, so long that one of its poles is practically isolated, and put this pole in the vicinity of an electric circuit, we find that it moves.
If we take a really long magnet, so long that one of its poles is almost isolated, and place this pole near an electric circuit, we notice that it moves.
Now, assuming for the sake of simplicity that the wire which determines the current is in the form of a circle, if we take a number of small magnets and place them all pointing in the same direction normal to the plane of the circle, so that they fill it and the wire binds them round, we find that this sheet of magnets has the same effect on the magnetic pole that the current has. The sheet of magnets may be curved, but the edge of it must coincide with the wire. The collection of magnets is then equivalent to the vortex sheet, and an elementary magnet to a part of it. Thus, we must think of a magnet as conditioning a rotation in the ether round the plane which bisects at right angles the line joining its poles.
Now, for the sake of simplicity, let’s assume the wire that carries the current is shaped like a circle. If we take several small magnets and arrange them all pointing in the same direction, perpendicular to the circle’s surface, filling it so the wire wraps around them, we discover that this layer of magnets has the same effect on a magnetic pole as the current does. The layer of magnets may be curved, but its edge must align with the wire. This collection of magnets is equivalent to a vortex layer, and an individual magnet represents a part of it. Therefore, we should think of a magnet as creating a rotation in the ether around the plane that cuts through at right angles to the line connecting its poles.
If a current is started in a circuit, we must imagine vortices like bowls turning themselves inside out, starting from the contour. In reaching a parallel circuit, if the vortex sheet were interrupted and joined momentarily to the second circuit by a free rim, the axis plane would lie between the two circuits, and a point on the second circuit opposite a point on the first would correspond to a point opposite to it on the first; hence we should expect a current in the opposite direction in the second circuit. Thus the phenomena of induction are not inconsistent with the hypothesis of a vortex about an axial plane.
If a current starts flowing in a circuit, we can think of vortices like bowls flipping inside out, beginning from the boundary. When we reach a parallel circuit, if the vortex sheet is momentarily interrupted and connected to the second circuit by a free edge, the axial plane will be situated between the two circuits, and a point on the second circuit directly across from a point on the first will correspond to a point directly across from it on the first; therefore, we should expect a current flowing in the opposite direction in the second circuit. Thus, the phenomena of induction are not at odds with the idea of a vortex around an axial plane.
In four-dimensional space, in which all four dimensions were commensurable, the intensity of the action transmitted by the medium would vary inversely as the cube of the distance. Now, the action of a current on a magnetic pole varies inversely as the square of the distance; hence, over measurable distances the extension of the ether in the fourth dimension cannot be assumed as other than small in comparison with those distances.
In four-dimensional space, where all four dimensions are compatible, the strength of the action transmitted through the medium would decrease as the cube of the distance increases. However, the effect of a current on a magnetic pole decreases with the square of the distance; therefore, over measurable distances, the expansion of the ether in the fourth dimension can only be regarded as small compared to those distances.
[Pg 230]
[Pg 230]
If we suppose the ether to be filled with vortices in the shape of four-dimensional spheres rotating with the A motion, the B motion would correspond to electricity in the one-fluid theory. There would thus be a possibility of electricity existing in two forms, statically, by itself, and, combined with the universal motion, in the form of a current.
If we imagine the ether filled with swirling vortices shaped like four-dimensional spheres that are spinning with the A motion, the B motion would relate to electricity in the one-fluid theory. This suggests that electricity could exist in two forms: statically, on its own, and when combined with the universal motion, as a current.
To arrive at a definite conclusion it will be necessary to investigate the resultant pressures which accompany the collocation of solid vortices with surface ones.
To reach a clear conclusion, it will be essential to examine the resulting pressures that come from the combination of solid vortices with surface ones.
To recapitulate:
To sum up:
The movements and mechanics of four-dimensional space are definite and intelligible. A vortex with a surface as its axis affords a geometric image of a closed circuit, and there are rotations which by their polarity afford a possible definition of statical electricity.[7]
The movements and mechanics of four-dimensional space are clear and understandable. A vortex with a surface as its axis provides a geometric representation of a closed circuit, and there are rotations which, due to their polarity, offer a possible definition of static electricity.[7]
[7] These double rotations of the A and B kinds I should like to call Hamiltons and co-Hamiltons, for it is a singular fact that in his “Quaternions” Sir Wm. Rowan Hamilton has given the theory of either the A or the B kind. They follow the laws of his symbols, I, J, K.
[7] I want to refer to these double rotations as Hamiltons and co-Hamiltons because it's interesting that in his “Quaternions,” Sir Wm. Rowan Hamilton presented the theory for either the A or B kind. They adhere to the rules of his symbols, I, J, K.
Hamiltons and co-Hamiltons seem to be natural units of geometrical expression. In the paper in the “Proceedings of the Royal Irish Academy,” Nov. 1903, already alluded to, I have shown something of the remarkable facility which is gained in dealing with the composition of three- and four-dimensional rotations by an alteration in Hamilton’s notation, which enables his system to be applied to both the A and B kinds of rotations.
Hamiltons and co-Hamiltons appear to be natural units for geometric expression. In the paper in the “Proceedings of the Royal Irish Academy,” Nov. 1903, mentioned earlier, I have demonstrated some of the remarkable ease gained in handling the composition of three- and four-dimensional rotations by changing Hamilton’s notation, which allows his system to be used for both A and B types of rotations.
The objection which has been often made to Hamilton’s system, namely, that it is only under special conditions of application that his processes give geometrically interpretable results, can be removed, if we assume that he was really dealing with a four-dimensional motion, and alter his notation to bring this circumstance into explicit recognition.
The criticism that Hamilton’s system only produces geometrically interpretable results under specific conditions can be addressed if we assume he was actually working with a four-dimensional motion and adjust his notation to explicitly acknowledge this.
[Pg 231]
[Pg 231]
APPENDIX I
THE MODELS
In Chapter XI. a description has been given which will enable any one to make a set of models illustrative of the tesseract and its properties. The set here supposed to be employed consists of:—
In Chapter XI, there's a description that will help anyone create a set of models that demonstrate the tesseract and its properties. The set we are assuming will be used includes:—
1. Three sets of twenty-seven cubes each.
1. Three groups of twenty-seven cubes each.
2. Twenty-seven slabs.
27 slabs.
3. Twelve cubes with points, lines, faces, distinguished by colours, which will be called the catalogue cubes.
3. Twelve cubes with dots, lines, and sides, marked by colors, which will be referred to as the catalog cubes.
The slabs are coloured like the twenty-seven cubes of the first cubic block in fig. 101, the one with red, white, yellow axes.
The slabs are colored like the twenty-seven cubes from the first cubic block in fig. 101, the one with red, white, and yellow axes.
The colours of the three sets of twenty-seven cubes are those of the cubes shown in fig. 101.
The colors of the three sets of twenty-seven cubes are the same as the cubes shown in fig. 101.
The slabs are used to form the representation of a cube in a plane, and can well be dispensed with by any one who is accustomed to deal with solid figures. But the whole theory depends on a careful observation of how the cube would be represented by these slabs.
The slabs are used to create a representation of a cube on a flat surface, and anyone familiar with solid shapes can easily do without them. However, the entire theory relies on a careful observation of how the cube would be depicted using these slabs.
In the first step, that of forming a clear idea how a[Pg 232] plane being would represent three-dimensional space, only one of the catalogue cubes and one of the three blocks is needed.
In the first step, which involves creating a clear idea of how a [Pg 232] plane being would represent three-dimensional space, you only need one of the catalog cubes and one of the three blocks.
Application of the Transition from Plane to Solid.
Look at fig. 1 of the views of the tesseract, or, what comes to the same thing, take catalogue cube No. 1 and place it before you with the red line running up, the white line running to the right, the yellow line running away. The three dimensions of space are then marked out by these lines or axes. Now take a piece of cardboard, or a book, and place it so that it forms a wall extending up and down not opposite to you, but running away parallel to the wall of the room on your left hand.
Look at fig. 1 of the tesseract's views, or, essentially, take catalogue cube No. 1 and position it in front of you with the red line pointing up, the white line pointing to the right, and the yellow line extending away. These lines or axes outline the three dimensions of space. Now grab a piece of cardboard or a book and place it so that it creates a wall extending up and down, not directly in front of you, but running parallel to the wall of the room on your left side.
Placing the catalogue cube against this wall we see that it comes into contact with it by the red and yellow lines, and by the included orange face.
Placing the catalog cube against this wall, we see that it touches it at the red and yellow lines, as well as the included orange face.
In the plane being’s world the aspect he has of the cube would be a square surrounded by red and yellow lines with grey points.
In the world of the plane being, the way he perceives the cube would be as a square outlined by red and yellow lines with grey dots.
Now, keeping the red line fixed, turn the cube about it so that the yellow line goes out to the right, and the white line comes into contact with the plane.
Now, with the red line held in place, rotate the cube around it so that the yellow line extends to the right, and the white line touches the plane.
In this case a different aspect is presented to the plane being, a square, namely, surrounded by red and white lines and grey points. You should particularly notice that when the yellow line goes out, at right angles to the plane, and the white comes in, the latter does not run in the same sense that the yellow did.
In this case, a different aspect is shown to the plane, which is a square, surrounded by red and white lines and gray dots. You should especially note that when the yellow line extends out at a right angle to the plane, and the white line comes in, the white line does not move in the same direction that the yellow line did.
From the fixed grey point at the base of the red line the yellow line ran away from you. The white line now runs towards you. This turning at right angles makes the line which was out of the plane before, come into it[Pg 233] in an opposite sense to that in which the line ran which has just left the plane. If the cube does not break through the plane this is always the rule.
From the solid grey point at the bottom of the red line, the yellow line extends away from you. The white line now comes towards you. This right-angle turn causes the line that was outside the plane to enter it in a direction opposite to that of the line that has just left the plane. If the cube doesn't break through the plane, this rule always applies.[Pg 233]
Again turn the cube back to the normal position with red running up, white to the right, and yellow away, and try another turning.
Again, turn the cube back to its original position with red facing up, white to the right, and yellow facing away, and try another turn.
You can keep the yellow line fixed, and turn the cube about it. In this case the red line going out to the right the white line will come in pointing downwards.
You can keep the yellow line in place and rotate the cube around it. In this scenario, the red line extending to the right will shift, and the white line will end up pointing downward.
You will be obliged to elevate the cube from the table in order to carry out this turning. It is always necessary when a vertical axis goes out of a space to imagine a movable support which will allow the line which ran out before to come in below.
You will need to lift the cube off the table to make this turn. Whenever a vertical axis exits a space, it’s essential to envision a movable support that will enable the line that moved out before to come back in below.
Having looked at the three ways of turning the cube so as to present different faces to the plane, examine what would be the appearance if a square hole were cut in the piece of cardboard, and the cube were to pass through it. A hole can be actually cut, and it will be seen that in the normal position, with red axis running up, yellow away, and white to the right, the square first perceived by the plane being—the one contained by red and yellow lines—would be replaced by another square of which the line towards you is pink—the section line of the pink face. The line above is light yellow, below is light yellow and on the opposite side away from you is pink.
Having looked at the three ways to rotate the cube to show different faces to the plane, consider what it would look like if a square hole were cut in the cardboard and the cube passed through it. A hole can be actually cut, and you will see that in the normal position, with the red axis pointing up, yellow facing away, and white to the right, the first square seen by the plane—the one bordered by the red and yellow lines—would be replaced by another square where the edge closest to you is pink—the section line of the pink face. The line above is light yellow, below is light yellow, and the opposite side facing away from you is pink.
In the same way the cube can be pushed through a square opening in the plane from any of the positions which you have already turned it into. In each case the plane being will perceive a different set of contour lines.
In the same way, the cube can be pushed through a square opening in the plane from any of the positions you've already placed it in. In each case, the plane will perceive a different set of contour lines.
Having observed these facts about the catalogue cube, turn now to the first block of twenty-seven cubes.
Having seen these details about the catalogue cube, now look at the first set of twenty-seven cubes.
You notice that the colour scheme on the catalogue cube and that of this set of blocks is the same.
You notice that the color scheme on the catalog cube and that of this set of blocks is the same.
[Pg 234]
[Pg 234]
Place them before you, a grey or null cube on the table, above it a red cube, and on the top a null cube again. Then away from you place a yellow cube, and beyond it a null cube. Then to the right place a white cube and beyond it another null. Then complete the block, according to the scheme of the catalogue cube, putting in the centre of all an ochre cube.
Place them in front of you: a gray or empty cube on the table, a red cube on top of it, and another empty cube on top of that. Then, place a yellow cube away from you, and beyond it, an empty cube. Next, place a white cube to the right, with another empty cube beyond it. Finally, complete the block according to the scheme of the catalog cube by placing an ochre cube in the center of everything.
You have now a cube like that which is described in the text. For the sake of simplicity, in some cases, this cubic block can be reduced to one of eight cubes, by leaving out the terminations in each direction. Thus, instead of null, red, null, three cubes, you can take null, red, two cubes, and so on.
You now have a cube like the one described in the text. To keep things simple, in some cases, this cubic block can be reduced to one of eight smaller cubes by removing the ends in each direction. So, instead of null, red, null, three cubes, you can go with null, red, two cubes, and so on.
It is useful, however, to practise the representation in a plane of a block of twenty-seven cubes. For this purpose take the slabs, and build them up against the piece of cardboard, or the book in such a way as to represent the different aspects of the cube.
It’s helpful to practice representing a block of twenty-seven cubes on a flat surface. To do this, take the slabs and stack them against a piece of cardboard or a book to show the different views of the cube.
Proceed as follows:—
Understood. Please provide the text you would like me to modernize.
First, cube in normal position.
First, cube in normal position.
Place nine slabs against the cardboard to represent the nine cubes in the wall of the red and yellow axes, facing the cardboard; these represent the aspect of the cube as it touches the plane.
Place nine slabs against the cardboard to represent the nine cubes in the wall of the red and yellow axes, facing the cardboard; these represent how the cube makes contact with the plane.
Now push these along the cardboard and make a different set of nine slabs to represent the appearance which the cube would present to a plane being, if it were to pass half way through the plane.
Now slide these along the cardboard and create a different set of nine slabs to show what the cube would look like to a flat being if it were to pass halfway through the flat surface.
There would be a white slab, above it a pink one, above that another white one, and six others, representing what would be the nature of a section across the middle of the block of cubes. The section can be thought of as a thin slice cut out by two parallel cuts across the cube. Having arranged these nine slabs, push them along the plane, and make another set of nine to represent what[Pg 235] would be the appearance of the cube when it had almost completely gone through. This set of nine will be the same as the first set of nine.
There would be a white slab, then a pink one on top of it, followed by another white one, and six more, showing what a cross-section through the middle of the block of cubes would look like. You can think of the section as a thin slice made by two parallel cuts across the cube. Once you've arranged these nine slabs, slide them along the plane and create another set of nine to represent what[Pg 235] the cube would look like when it has almost completely been sliced through. This second set of nine will be identical to the first set of nine.
Now we have in the plane three sets of nine slabs each, which represent three sections of the twenty-seven block.
Now we have on the plane three sets of nine slabs each, which represent three sections of the twenty-seven block.
They are put alongside one another. We see that it does not matter in what order the sets of nine are put. As the cube passes through the plane they represent appearances which follow the one after the other. If they were what they represented, they could not exist in the same plane together.
They are placed next to each other. We notice that the order of the sets of nine doesn't matter. As the cube moves through the plane, they display appearances that follow one after the other. If they were truly what they represented, they wouldn't be able to exist together in the same plane.
This is a rather important point, namely, to notice that they should not co-exist on the plane, and that the order in which they are placed is indifferent. When we represent a four-dimensional body our solid cubes are to us in the same position that the slabs are to the plane being. You should also notice that each of these slabs represents only the very thinnest slice of a cube. The set of nine slabs first set up represents the side surface of the block. It is, as it were, a kind of tray—a beginning from which the solid cube goes off. The slabs as we use them have thickness, but this thickness is a necessity of construction. They are to be thought of as merely of the thickness of a line.
This is a crucial point: they shouldn't exist together on the plane, and the order they’re placed in doesn't really matter. When we visualize a four-dimensional object, our solid cubes are in the same position as the slabs are on the plane. It’s also important to note that each of these slabs represents just a very thin slice of a cube. The set of nine slabs we initially created represents the side surface of the block. It’s like a kind of tray—a starting point from which the solid cube extends. The slabs, as we’re using them, have thickness, but that thickness is just a construction necessity. They should be thought of as being the thickness of a line.
If now the block of cubes passed through the plane at the rate of an inch a minute the appearance to a plane being would be represented by:—
If the block of cubes moved through the plane at a speed of an inch per minute, the view to a plane being would look like this:—
1. The first set of nine slabs lasting for one minute.
1. The first set of nine slabs took one minute.
2. The second set of nine slabs lasting for one minute.
2. The second set of nine slabs lasts for one minute.
3. The third set of nine slabs lasting for one minute.
3. The third set of nine slabs lasts for one minute.
Now the appearances which the cube would present to the plane being in other positions can be shown by means of these slabs. The use of such slabs would be the means by which a plane being could acquire a[Pg 236] familiarity with our cube. Turn the catalogue cube (or imagine the coloured figure turned) so that the red line runs up, the yellow line out to the right, and the white line towards you. Then turn the block of cubes to occupy a similar position.
Now, the different views the cube would show to the plane when positioned differently can be illustrated using these slabs. These slabs would help a plane being become familiar with our cube. Rotate the catalog cube (or picture the colored shape rotated) so that the red line is vertical, the yellow line extends to the right, and the white line points toward you. Then, turn the block of cubes to match that same position.
The block has now a different wall in contact with the plane. Its appearance to a plane being will not be the same as before. He has, however, enough slabs to represent this new set of appearances. But he must remodel his former arrangement of them.
The block now has a different wall touching the plane. Its look to a plane being won't be the same as before. However, he has enough slabs to show this new set of appearances. But he needs to reorganize his previous arrangement of them.
He must take a null, a red, and a null slab from the first of his sets of slabs, then a white, a pink, and a white from the second, and then a null, a red, and a null from the third set of slabs.
He needs to take a null, a red, and a null slab from the first of his sets of slabs, then a white, a pink, and a white from the second, and then a null, a red, and a null from the third set of slabs.
He takes the first column from the first set, the first column from the second set, and the first column from the third set.
He takes the first column from the first group, the first column from the second group, and the first column from the third group.
To represent the half-way-through appearance, which is as if a very thin slice were cut out half way through the block, he must take the second column of each of his sets of slabs, and to represent the final appearance, the third column of each set.
To show the appearance halfway through, as if a really thin slice were cut out from the block, he needs to take the second column of each set of slabs. To represent the final appearance, he should use the third column from each set.
Now turn the catalogue cube back to the normal position, and also the block of cubes.
Now turn the catalog cube back to the normal position, and also the block of cubes.
There is another turning—a turning about the yellow line, in which the white axis comes below the support.
There’s another turn—a turn around the yellow line, where the white axis falls below the support.
You cannot break through the surface of the table, so you must imagine the old support to be raised. Then the top of the block of cubes in its new position is at the level at which the base of it was before.
You can't break through the table's surface, so you need to picture the old support being lifted. Then the top of the cube stack in its new position is at the same level where its base used to be.
Now representing the appearance on the plane, we must draw a horizontal line to represent the old base. The line should be drawn three inches high on the cardboard.
Now to show the appearance on the plane, we need to draw a horizontal line to represent the old base. The line should be drawn three inches up on the cardboard.
Below this the representative slabs can be arranged.
Below this, the representative slabs can be organized.
It is easy to see what they are. The old arrangements[Pg 237] have to be broken up, and the layers taken in order, the first layer of each for the representation of the aspect of the block as it touches the plane.
It’s clear what they are. The old arrangements[Pg 237] need to be dismantled, and the layers taken in sequence, starting with the first layer of each to show how the block interacts with the plane.
Then the second layers will represent the appearance half way through, and the third layers will represent the final appearance.
Then the second layer will show the appearance halfway through, and the third layer will show the final appearance.
It is evident that the slabs individually do not represent the same portion of the cube in these different presentations.
It is clear that the slabs do not each represent the same part of the cube in these different presentations.
In the first case each slab represents a section or a face perpendicular to the white axis, in the second case a face or a section which runs perpendicularly to the yellow axis, and in the third case a section or a face perpendicular to the red axis.
In the first case, each slab represents a section or a face that is perpendicular to the white axis. In the second case, it's a face or section that runs perpendicularly to the yellow axis. In the third case, it's a section or face that is perpendicular to the red axis.
But by means of these nine slabs the plane being can represent the whole of the cubic block. He can touch and handle each portion of the cubic block, there is no part of it which he cannot observe. Taking it bit by bit, two axes at a time, he can examine the whole of it.
But with these nine slabs, the flat being can represent the entire cubic block. They can touch and manipulate each part of the cubic block; there's no part they can't see. By looking at it piece by piece, two axes at a time, they can analyze all of it.
Our Representation of a Block of Tesseracts.
Look at the views of the tesseract 1, 2, 3, or take the catalogue cubes 1, 2, 3, and place them in front of you, in any order, say running from left to right, placing 1 in the normal position, the red axis running up, the white to the right, and yellow away.
Look at the views of the tesseract 1, 2, 3, or take the catalog cubes 1, 2, 3, and arrange them in front of you in any order, for example, from left to right. Position 1 normally, with the red axis pointing up, the white axis to the right, and the yellow axis facing away.
Now notice that in catalogue cube 2 the colours of each region are derived from those of the corresponding region of cube 1 by the addition of blue. Thus null + blue = blue, and the corners of number 2 are blue. Again, red + blue = purple, and the vertical lines of 2 are purple. Blue + yellow = green, and the line which runs away is coloured green.
Now notice that in catalogue cube 2, the colors of each region come from the corresponding region of cube 1 with the addition of blue. So, null + blue = blue, and the corners of cube 2 are blue. Again, red + blue = purple, and the vertical lines of cube 2 are purple. Blue + yellow = green, and the line that extends out is colored green.
By means of these observations you may be sure that[Pg 238] catalogue cube 2 is rightly placed. Catalogue cube 3 is just like number 1.
By these observations, you can be confident that [Pg 238] catalogue cube 2 is in the right position. Catalogue cube 3 is exactly like number 1.
Having these cubes in what we may call their normal position, proceed to build up the three sets of blocks.
Having these cubes in what we can call their normal position, go ahead and build the three sets of blocks.
This is easily done in accordance with the colour scheme on the catalogue cubes.
This can be easily done according to the color scheme on the catalog cubes.
The first block we already know. Build up the second block, beginning with a blue corner cube, placing a purple on it, and so on.
The first block is already familiar to us. Start the second block by placing a blue corner cube, then add a purple one on top, and continue from there.
Having these three blocks we have the means of representing the appearances of a group of eighty-one tesseracts.
Having these three blocks, we can represent the appearances of a group of eighty-one tesseracts.
Let us consider a moment what the analogy in the case of the plane being is.
Let’s take a moment to think about the analogy in the case of the plane being.
He has his three sets of nine slabs each. We have our three sets of twenty-seven cubes each.
He has his three sets of nine slabs each. We have our three sets of twenty-seven cubes each.
Our cubes are like his slabs. As his slabs are not the things which they represent to him, so our cubes are not the things they represent to us.
Our cubes are like his slabs. Just as his slabs aren't the things they represent to him, our cubes aren't the things they represent to us.
The plane being’s slabs are to him the faces of cubes.
The flat surfaces of the plane are to him the faces of cubes.
Our cubes then are the faces of tesseracts, the cubes by which they are in contact with our space.
Our cubes are the faces of tesseracts, the cubes that are in contact with our space.
As each set of slabs in the case of the plane being might be considered as a sort of tray from which the solid contents of the cubes came out, so our three blocks of cubes may be considered as three-space trays, each of which is the beginning of an inch of the solid contents of the four-dimensional solids starting from them.
As each set of slabs in the case of the plane can be seen as a kind of tray from which the solid contents of the cubes emerged, our three blocks of cubes can be viewed as three-dimensional trays, each representing the start of an inch of the solid contents of the four-dimensional solids originating from them.
We want now to use the names null, red, white, etc., for tesseracts. The cubes we use are only tesseract faces. Let us denote that fact by calling the cube of null colour, null face; or, shortly, null f., meaning that it is the face of a tesseract.
We now want to use the names null, red, white, etc., for tesseracts. The cubes we use are just faces of the tesseracts. Let's make this clear by referring to the cube of the null color as the null face, or simply null f., which indicates that it is a face of a tesseract.
To determine which face it is let us look at the catalogue cube 1 or the first of the views of the tesseract, which[Pg 239] can be used instead of the models. It has three axes, red, white, yellow, in our space. Hence the cube determined by these axes is the face of the tesseract which we now have before us. It is the ochre face. It is enough, however, simply to say null f., red f. for the cubes which we use.
To figure out which face it is, let's check out the catalogue for cube 1 or the first view of the tesseract, which[Pg 239] can be used instead of the models. It has three axes: red, white, and yellow, in our space. So, the cube defined by these axes is the face of the tesseract that we see before us. It’s the ochre face. However, it’s enough to just say null f. or red f. for the cubes we use.
To impress this in your mind, imagine that tesseracts do actually run from each cube. Then, when you move the cubes about, you move the tesseracts about with them. You move the face but the tesseract follows with it, as the cube follows when its face is shifted in a plane.
To help you understand this concept, picture tesseracts actually extending from each cube. So, when you shift the cubes around, you’re also moving the tesseracts along with them. You change the face, but the tesseract moves with it, just like the cube moves when its face is adjusted in a plane.
The cube null in the normal position is the cube which has in it the red, yellow, white axes. It is the face having these, but wanting the blue. In this way you can define which face it is you are handling. I will write an “f.” after the name of each tesseract just as the plane being might call each of his slabs null slab, yellow slab, etc., to denote that they were representations.
The null cube in the standard position is the cube that includes the red, yellow, and white axes. It has these axes on one face but is missing the blue one. This way, you can identify which face you're working with. I will write an “f.” after the name of each tesseract just like the being in the plane might refer to each of his slabs as null slab, yellow slab, etc., to indicate that they are representations.
We have then in the first block of twenty-seven cubes, the following—null f., red f., null f., going up; white f., null f., lying to the right, and so on. Starting from the null point and travelling up one inch we are in the null region, the same for the away and the right-hand directions. And if we were to travel in the fourth dimension for an inch we should still be in a null region. The tesseract stretches equally all four ways. Hence the appearance we have in this first block would do equally well if the tesseract block were to move across our space for a certain distance. For anything less than an inch of their transverse motion we should still have the same appearance. You must notice, however, that we should not have null face after the motion had begun.
We have in the first block of twenty-seven cubes the following—null f., red f., null f., moving up; white f., null f., lying to the right, and so on. Starting from the null point and moving up one inch, we are in the null region, which is the same for the away and right-hand directions. If we were to move in the fourth dimension for an inch, we would still be in a null region. The tesseract stretches equally in all four directions. Therefore, the appearance we have in this first block would work just as well if the tesseract block moved across our space for a certain distance. For anything less than an inch of their sideways motion, we would still see the same appearance. However, you must note that we would not have a null face once the motion began.
When the tesseract, null for instance, had moved ever so little we should not have a face of null but a section of null in our space. Hence, when we think of the motion[Pg 240] across our space we must call our cubes tesseract sections. Thus on null passing across we should see first null f., then null s., and then, finally, null f. again.
When the tesseract, null for example, has moved even a tiny bit, we wouldn't see a face of null but a section of null in our space. So, when we consider the motion across our space, we should refer to our cubes as tesseract sections. Therefore, as null moves across, we should first see null f., then null s., and then finally, null f. again.
Imagine now the whole first block of twenty-seven tesseracts to have moved tranverse to our space a distance of one inch. Then the second set of tesseracts, which originally were an inch distant from our space, would be ready to come in.
Imagine now the entire first block of twenty-seven tesseracts has moved sideways in our space by a distance of one inch. Then the second set of tesseracts, which were originally one inch away from our space, would be ready to come in.
Their colours are shown in the second block of twenty-seven cubes which you have before you. These represent the tesseract faces of the set of tesseracts that lay before an inch away from our space. They are ready now to come in, and we can observe their colours. In the place which null f. occupied before we have blue f., in place of red f. we have purple f., and so on. Each tesseract is coloured like the one whose place it takes in this motion with the addition of blue.
Their colors are displayed in the second block of twenty-seven cubes in front of you. These represent the faces of the tesseracts that are just an inch away from our space. They are ready to come in now, and we can see their colors. In the position that null f. occupied before, we now have blue f.; in place of red f., we have purple f.; and so on. Each tesseract is colored like the one whose position it takes in this motion, with the addition of blue.
Now if the tesseract block goes on moving at the rate of an inch a minute, this next set of tesseracts will occupy a minute in passing across. We shall see, to take the null one for instance, first of all null face, then null section, then null face again.
Now if the tesseract block keeps moving at one inch per minute, the next set of tesseracts will take a minute to pass through. We'll observe, using the null one as an example, first the null face, then the null section, and then the null face again.
At the end of the second minute the second set of tesseracts has gone through, and the third set comes in. This, as you see, is coloured just like the first. Altogether, these three sets extend three inches in the fourth dimension, making the tesseract block of equal magnitude in all dimensions.
At the end of the second minute, the second set of tesseracts has passed through, and the third set arrives. This one, as you can see, is colored just like the first. In total, these three sets extend three inches in the fourth dimension, creating a tesseract block of equal size in all dimensions.
We have now before us a complete catalogue of all the tesseracts in our group. We have seen them all, and we shall refer to this arrangement of the blocks as the “normal position.” We have seen as much of each tesseract at a time as could be done in a three-dimensional space. Each part of each tesseract has been in our space, and we could have touched it.
We now have a complete list of all the tesseracts in our group. We've observed all of them, and we’ll refer to this setup of the blocks as the “normal position.” We’ve seen as much of each tesseract as is possible in three-dimensional space. Every part of each tesseract has been in our space, and we could have touched it.
[Pg 241]
[Pg 241]
The fourth dimension appeared to us as the duration of the block.
The fourth dimension came to us as the length of time the block existed.
If a bit of our matter were to be subjected to the same motion it would be instantly removed out of our space. Being thin in the fourth dimension it is at once taken out of our space by a motion in the fourth dimension.
If a piece of our matter were to experience the same motion, it would be immediately taken out of our space. Being thin in the fourth dimension, it is quickly removed from our space by a movement in the fourth dimension.
But the tesseract block we represent having length in the fourth dimension remains steadily before our eyes for three minutes, when it is subjected to this transverse motion.
But the tesseract block we represent with a length in the fourth dimension stays clearly in view for three minutes when it undergoes this sideways motion.
We have now to form representations of the other views of the same tesseract group which are possible in our space.
We now need to create representations of the other perspectives of the same tesseract group that are possible in our space.
Let us then turn the block of tesseracts so that another face of it comes into contact with our space, and then by observing what we have, and what changes come when the block traverses our space, we shall have another view of it. The dimension which appeared as duration before will become extension in one of our known dimensions, and a dimension which coincided with one of our space dimensions will appear as duration.
Let’s rotate the block of tesseracts so that a different face touches our space, and by looking at what we have and the changes that happen as the block moves through our space, we’ll gain a new perspective on it. The dimension that seemed like time before will transform into extension in one of our familiar dimensions, and a dimension that aligned with one of our spatial dimensions will show up as time.
Leaving catalogue cube 1 in the normal position, remove the other two, or suppose them removed. We have in space the red, the yellow, and the white axes. Let the white axis go out into the unknown, and occupy the position the blue axis holds. Then the blue axis, which runs in that direction now will come into space. But it will not come in pointing in the same way that the white axis does now. It will point in the opposite sense. It will come in running to the left instead of running to the right as the white axis does now.
Leaving catalogue cube 1 in its usual spot, remove the other two, or imagine they’ve been removed. We have the red, yellow, and white axes in space. Let the white axis extend into the unknown and take the position of the blue axis. Then the blue axis, which is currently pointing that way, will come into space. But it will arrive pointing in the opposite direction from how the white axis is pointing now. It will come in moving to the left instead of moving to the right like the white axis does now.
When this turning takes place every part of the cube 1 will disappear except the left-hand face—the orange face.
When this rotation happens, every part of the cube 1 will vanish except for the left face—the orange face.
And the new cube that appears in our space will run to the left from this orange face, having axes, red, yellow, blue.
And the new cube that shows up in our area will move to the left from this orange side, having axes of red, yellow, and blue.
[Pg 242]
[Pg 242]
Take models 4, 5, 6. Place 4, or suppose No. 4 of the tesseract views placed, with its orange face coincident with the orange face of 1, red line to red line, and yellow line to yellow line, with the blue line pointing to the left. Then remove cube 1 and we have the tesseract face which comes in when the white axis runs in the positive unknown, and the blue axis comes into our space.
Take models 4, 5, 6. Position model 4 so that its orange face lines up with the orange face of model 1, red line to red line, and yellow line to yellow line, while the blue line is directed to the left. Then, take away cube 1 and we reveal the tesseract face that appears when the white axis moves in the positive unknown direction, allowing the blue axis to enter our space.
Now place catalogue cube 5 in some position, it does not matter which, say to the left; and place it so that there is a correspondence of colour corresponding to the colour of the line that runs out of space. The line that runs out of space is white, hence, every part of this cube 5 should differ from the corresponding part of 4 by an alteration in the direction of white.
Now put catalog cube 5 in any position, it doesn't really matter which, let's say to the left; and make sure that there's a color match with the color of the line that extends out of space. The line that extends out of space is white, so every part of this cube 5 should be different from the corresponding part of 4 by a change in the direction of white.
Thus we have white points in 5 corresponding to the null points in 4. We have a pink line corresponding to a red line, a light yellow line corresponding to a yellow line, an ochre face corresponding to an orange face. This cube section is completely named in Chapter XI. Finally cube 6 is a replica of 1.
Thus we have white points in 5 that match the null points in 4. We have a pink line corresponding to a red line, a light yellow line corresponding to a yellow line, and an ochre face corresponding to an orange face. This cube section is fully described in Chapter XI. Finally, cube 6 is a copy of 1.
These catalogue cubes will enable us to set up our models of the block of tesseracts.
These catalog cubes will allow us to create our models of the tesseract block.
First of all for the set of tesseracts, which beginning in our space reach out one inch in the unknown, we have the pattern of catalogue cube 4.
First of all, for the set of tesseracts, which start in our space and extend one inch into the unknown, we have the pattern of catalog cube 4.
We see that we can build up a block of twenty-seven tesseract faces after the colour scheme of cube 4, by taking the left-hand wall of block 1, then the left-hand wall of block 2, and finally that of block 3. We take, that is, the three first walls of our previous arrangement to form the first cubic block of this new one.
We can create a block of twenty-seven tesseract faces based on the color scheme of cube 4 by using the left wall of block 1, then the left wall of block 2, and finally the left wall of block 3. In other words, we're using the first three walls of our previous setup to form the first cubic block of this new configuration.
This will represent the cubic faces by which the group of tesseracts in its new position touches our space. We have running up, null f., red f., null f. In the next vertical line, on the side remote from us, we have yellow f.,[Pg 243] orange f., yellow f., and then the first colours over again. Then the three following columns are, blue f., purple f., blue f.; green f., brown f., green f.; blue f., purple f., blue f. The last three columns are like the first.
This will show the cubic faces that the group of tesseracts touches our space in its new position. We have null f. running up, red f., null f. In the next vertical line, on the side farthest from us, we have yellow f.,[Pg 243] orange f., yellow f., and then the first colors again. Then the next three columns are blue f., purple f., blue f.; green f., brown f., green f.; blue f., purple f., blue f. The last three columns are like the first.
These tesseracts touch our space, and none of them are by any part of them distant more than an inch from it. What lies beyond them in the unknown?
These tesseracts interact with our space, and none of them are more than an inch away from it. What is beyond them in the unknown?
This can be told by looking at catalogue cube 5. According to its scheme of colour we see that the second wall of each of our old arrangements must be taken. Putting them together we have, as the corner, white f. above it, pink f. above it, white f. The column next to this remote from us is as follows:—light yellow f., ochre f., light yellow f., and beyond this a column like the first. Then for the middle of the block, light blue f., above it light purple, then light blue. The centre column has, at the bottom, light green f., light brown f. in the centre and at the top light green f. The last wall is like the first.
This can be seen by looking at catalog cube 5. According to its color scheme, we see that we must take the second wall of each of our old arrangements. Putting them together, we have, as the corner, white f., above it, pink f., and above that, white f. The column next to this, which is away from us, is as follows: light yellow f., ochre f., light yellow f., and beyond this, a column like the first. Then for the middle of the block, light blue f., above it light purple, then light blue again. The center column has, at the bottom, light green f., light brown f. in the center, and at the top, light green f. The last wall is like the first.
The third block is made by taking the third walls of our previous arrangement, which we called the normal one.
The third block is created by using the third walls from our earlier setup, which we referred to as the normal one.
You may ask what faces and what sections our cubes represent. To answer this question look at what axes you have in our space. You have red, yellow, blue. Now these determine brown. The colours red, yellow, blue are supposed by us when mixed to produce a brown colour. And that cube which is determined by the red, yellow, blue axes we call the brown cube.
You might wonder what faces and sections our cubes represent. To answer that, take a look at the axes we have in our space. You have red, yellow, and blue. These colors create brown when mixed together. The cube defined by the red, yellow, and blue axes is what we call the brown cube.
When the tesseract block in its new position begins to move across our space each tesseract in it gives a section in our space. This section is transverse to the white axis, which now runs in the unknown.
When the tesseract block in its new position starts to move through our space, each tesseract within it creates a section in our space. This section is perpendicular to the white axis, which now stretches into the unknown.
As the tesseract in its present position passes across our space, we should see first of all the first of the blocks[Pg 244] of cubic faces we have put up—these would last for a minute, then would come the second block and then the third. At first we should have a cube of tesseract faces, each of which would be brown. Directly the movement began, we should have tesseract sections transverse to the white line.
As the tesseract moves through our space, we would first see the first of the blocks[Pg 244] with cubic faces that we’ve set up—these would last for a minute, followed by the second block, then the third. Initially, we would see a cube of tesseract faces, all of which would be brown. As soon as the movement started, we would see tesseract sections crossing the white line.
There are two more analogous positions in which the block of tesseracts can be placed. To find the third position, restore the blocks to the normal arrangement.
There are two more similar positions where the block of tesseracts can be placed. To find the third position, return the blocks to their normal arrangement.
Let us make the yellow axis go out into the positive unknown, and let the blue axis, consequently, come in running towards us. The yellow ran away, so the blue will come in running towards us.
Let’s extend the yellow axis into the positive unknown, and as a result, the blue axis will come in moving towards us. The yellow moved away, so the blue will come in moving towards us.
Put catalogue cube 1 in its normal position. Take catalogue cube 7 and place it so that its pink face coincides with the pink face of cube 1, making also its red axis coincide with the red axis of 1 and its white with the white. Moreover, make cube 7 come towards us from cube 1. Looking at it we see in our space, red, white, and blue axes. The yellow runs out. Place catalogue cube 8 in the neighbourhood of 7—observe that every region in 8 has a change in the direction of yellow from the corresponding region in 7. This is because it represents what you come to now in going in the unknown, when the yellow axis runs out of our space. Finally catalogue cube 9, which is like number 7, shows the colours of the third set of tesseracts. Now evidently, starting from the normal position, to make up our three blocks of tesseract faces we have to take the near wall from the first block, the near wall from the second, and then the near wall from the third block. This gives us the cubic block formed by the faces of the twenty-seven tesseracts which are now immediately touching our space.
Put catalog cube 1 in its normal position. Take catalog cube 7 and place it so that its pink face aligns with the pink face of cube 1, also ensuring that its red axis lines up with the red axis of cube 1 and its white with the white. Additionally, pull cube 7 toward us from cube 1. Looking at it, we see red, white, and blue axes in our space. The yellow runs out. Place catalog cube 8 near cube 7—note that every area in cube 8 has a change in the direction of yellow from the corresponding area in cube 7. This represents what you encounter now when venturing into the unknown, as the yellow axis exits our space. Finally, catalog cube 9, which is similar to cube 7, displays the colors of the third set of tesseracts. Clearly, starting from the normal position, to create our three blocks of tesseract faces, we need to take the near wall from the first block, the near wall from the second, and then the near wall from the third block. This gives us the cubic block formed by the faces of the twenty-seven tesseracts that are now directly touching our space.
Following the colour scheme of catalogue cube 8,[Pg 245] we make the next set of twenty-seven tesseract faces, representing the tesseracts, each of which begins one inch off from our space, by putting the second walls of our previous arrangement together, and the representation of the third set of tesseracts is the cubic block formed of the remaining three walls.
Following the color scheme of catalog cube 8,[Pg 245] we create the next set of twenty-seven tesseract faces, representing the tesseracts, with each one starting one inch out from our space by connecting the second walls of our previous arrangement, and the representation of the third set of tesseracts is the cubic block made up of the remaining three walls.
Since we have red, white, blue axes in our space to begin with, the cubes we see at first are light purple tesseract faces, and after the transverse motion begins we have cubic sections transverse to the yellow line.
Since we have red, white, and blue axes in our space to start with, the cubes we see at first are light purple tesseract faces, and after the transverse motion begins, we see cubic sections across the yellow line.
Restore the blocks to the normal position, there remains the case in which the red axis turns out of space. In this case the blue axis will come in downwards, opposite to the sense in which the red axis ran.
Restore the blocks to their normal position; there remains the situation where the red axis is out of line. In this case, the blue axis will move downward, in the opposite direction to where the red axis was pointing.
In this case take catalogue cubes 10, 11, 12. Lift up catalogue cube 1 and put 10 underneath it, imagining that it goes down from the previous position of 1.
In this case, take catalog cubes 10, 11, and 12. Lift up catalog cube 1 and place cube 10 underneath it, imagining that it descends from the previous position of cube 1.
We have to keep in space the white and the yellow axes, and let the red go out, the blue come in.
We need to maintain the white and yellow axes in space, while allowing the red to exit and the blue to enter.
Now, you will find on cube 10 a light yellow face; this should coincide with the base of 1, and the white and yellow lines on the two cubes should coincide. Then the blue axis running down you have the catalogue cube correctly placed, and it forms a guide for putting up the first representative block.
Now, you'll see a light yellow face on cube 10; this should match the base of 1, and the white and yellow lines on both cubes should align. Then, the blue axis running down shows that you have the catalog cube correctly positioned, which acts as a guide for setting up the first representative block.
Catalogue cube 11 will represent what lies in the fourth dimension—now the red line runs in the fourth dimension. Thus the change from 10 to 11 should be towards red, corresponding to a null point is a red point, to a white line is a pink line, to a yellow line an orange line, and so on.
Catalogue cube 11 will show what exists in the fourth dimension—now the red line extends into the fourth dimension. So, the transition from 10 to 11 should lean towards red, where a null point is a red point, a white line becomes a pink line, a yellow line transitions to an orange line, and so forth.
Catalogue cube 12 is like 10. Hence we see that to build up our blocks of tesseract faces we must take the bottom layer of the first block, hold that up in the air, underneath it place the bottom layer of the second block,[Pg 246] and finally underneath this last the bottom layer of the last of our normal blocks.
Catalogue cube 12 is similar to cube 10. So, to construct our tesseract faces, we need to take the bottom layer of the first cube, hold it up in the air, place the bottom layer of the second cube underneath it, and finally, put the bottom layer of the last of our regular cubes beneath this one.[Pg 246]
Similarly we make the second representative group by taking the middle courses of our three blocks. The last is made by taking the three topmost layers. The three axes in our space before the transverse motion begins are blue, white, yellow, so we have light green tesseract faces, and after the motion begins sections transverse to the red light.
Similarly, we create the second representative group by taking the middle courses of our three blocks. The last group is formed by using the three top layers. The three axes in our space before the transverse motion starts are blue, white, and yellow, giving us light green tesseract faces. Once the motion begins, there are sections that are transverse to the red light.
These three blocks represent the appearances as the tesseract group in its new position passes across our space. The cubes of contact in this case are those determinal by the three axes in our space, namely, the white, the yellow, the blue. Hence they are light green.
These three blocks show what happens as the tesseract group moves through our space in its new position. The cubes of contact here are determined by the three axes in our space: the white, the yellow, and the blue. That's why they appear light green.
It follows from this that light green is the interior cube of the first block of representative cubic faces.
It follows from this that light green is the inner cube of the first block of representative cubic faces.
Practice in the manipulations described, with a realization in each case of the face or section which is in our space, is one of the best means of a thorough comprehension of the subject.
Practicing the techniques described, while understanding the face or section that exists in our space, is one of the best ways to fully grasp the subject.
We have to learn how to get any part of these four-dimensional figures into space, so that we can look at them. We must first learn to swing a tesseract, and a group of tesseracts about in any way.
We need to learn how to project any part of these four-dimensional shapes into space so that we can observe them. First, we must learn how to manipulate a tesseract and how to move a group of tesseracts around in any way.
When these operations have been repeated and the method of arrangement of the set of blocks has become familiar, it is a good plan to rotate the axes of the normal cube 1 about a diagonal, and then repeat the whole series of turnings.
When these steps have been repeated and the arrangement of the set of blocks has become familiar, it’s a good idea to rotate the axes of the standard cube 1 around a diagonal, and then go through the entire series of rotations again.
Thus, in the normal position, red goes up, white to the right, yellow away. Make white go up, yellow to the right, and red away. Learn the cube in this position by putting up the set of blocks of the normal cube, over and over again till it becomes as familiar to you as in the normal position. Then when this is learned, and the corre[Pg 247]sponding changes in the arrangements of the tesseract groups are made, another change should be made: let, in the normal cube, yellow go up, red to the right, and white away.
Thus, in the regular position, red goes up, white goes to the right, and yellow goes away. Make white go up, yellow go to the right, and red go away. Learn the cube in this position by repeatedly arranging the set of blocks in the normal cube until it feels as familiar to you as in the regular position. Once you've mastered this and made the corresponding changes in the arrangements of the tesseract groups, you should make another change: let yellow go up, red go to the right, and white go away in the normal cube. [Pg 247]
Learn the normal block of cubes in this new position by arranging them and re-arranging them till you know without thought where each one goes. Then carry out all the tesseract arrangements and turnings.
Learn the usual arrangement of cubes in this new position by organizing and reorganizing them until you instinctively know where each one belongs. Then perform all the tesseract configurations and rotations.
If you want to understand the subject, but do not see your way clearly, if it does not seem natural and easy to you, practise these turnings. Practise, first of all, the turning of a block of cubes round, so that you know it in every position as well as in the normal one. Practise by gradually putting up the set of cubes in their new arrangements. Then put up the tesseract blocks in their arrangements. This will give you a working conception of higher space, you will gain the feeling of it, whether you take up the mathematical treatment of it or not.
If you want to understand the topic but feel a bit lost or it doesn’t seem natural or straightforward, try practicing these rotations. Start by practicing the rotation of a block of cubes so that you're familiar with it in every position, not just the standard one. Gradually arrange the cubes in their new configurations. Then, arrange the tesseract blocks in their setups. This will help you develop a grasp of higher dimensions, and you'll feel comfortable with it, whether or not you dive into the math behind it.
[Pg 248]
[Pg 248]
APPENDIX II
A LANGUAGE OF SPACE
The mere naming the parts of the figures we consider involves a certain amount of time and attention. This time and attention leads to no result, for with each new figure the nomenclature applied is completely changed, every letter or symbol is used in a different significance.
The simple act of naming the parts of the figures we look at takes a bit of time and focus. However, this effort yields no results because with each new figure, the naming system changes completely, and every letter or symbol has a different meaning.
Surely it must be possible in some way to utilise the labour thus at present wasted!
Surely, there has to be a way to make use of the labor that is currently being wasted!
Why should we not make a language for space itself, so that every position we want to refer to would have its own name? Then every time we named a figure in order to demonstrate its properties we should be exercising ourselves in the vocabulary of place.
Why shouldn't we create a language for space itself, so that every position we want to refer to has its own name? Then every time we named a figure to demonstrate its properties, we would be practicing the vocabulary of location.
If we use a definite system of names, and always refer to the same space position by the same name, we create as it were a multitude of little hands, each prepared to grasp a special point, position, or element, and hold it for us in its proper relations.
If we use a specific system of names and consistently refer to the same location by the same name, we essentially create a bunch of little hands, each ready to hold a particular point, position, or element, and keep it in its correct relations for us.
We make, to use another analogy, a kind of mental paper, which has somewhat of the properties of a sensitive plate, in that it will register, without effort, complex, visual, or tactual impressions.
We create, using another analogy, a type of mental paper that has some properties similar to a sensitive plate, as it effortlessly captures complex visual or tactile impressions.
But of far more importance than the applications of a space language to the plane and to solid space is the[Pg 249] facilitation it brings with it to the study of four-dimensional shapes.
But much more important than the applications of a space language to the plane and to solid space is the[Pg 249] ease it provides for studying four-dimensional shapes.
I have delayed introducing a space language because all the systems I made turned out, after giving them a fair trial, to be intolerable. I have now come upon one which seems to present features of permanence, and I will here give an outline of it, so that it can be applied to the subject of the text, and in order that it may be subjected to criticism.
I have put off introducing a space language because all the systems I created ended up being unworkable after I tested them. I’ve now found one that seems to have lasting qualities, and I will outline it here so it can be applied to the topic at hand and open to feedback.
The principle on which the language is constructed is to sacrifice every other consideration for brevity.
The main principle behind the language is to prioritize brevity above all else.
It is indeed curious that we are able to talk and converse on every subject of thought except the fundamental one of space. The only way of speaking about the spatial configurations that underlie every subject of discursive thought is a co-ordinate system of numbers. This is so awkward and incommodious that it is never used. In thinking also, in realising shapes, we do not use it; we confine ourselves to a direct visualisation.
It’s pretty interesting that we can discuss and chat about every topic imaginable except the basic one of space. The only way to talk about the spatial arrangements that form the basis of all our discussions is through a coordinate system of numbers. This method is so clumsy and inconvenient that we hardly ever use it. In our thoughts as well, when we imagine shapes, we don't rely on it; we stick to direct visualization.
Now, the use of words corresponds to the storing up of our experience in a definite brain structure. A child, in the endless tactual, visual, mental manipulations it makes for itself, is best left to itself, but in the course of instruction the introduction of space names would make the teachers work more cumulative, and the child’s knowledge more social.
Now, using words relates to how we store our experiences in a specific brain structure. A child, through endless touch, sight, and mental interactions, is best allowed to learn independently. However, during instruction, integrating names for spaces would enhance the teacher's work and make the child's knowledge more communal.
Their full use can only be appreciated, if they are introduced early in the course of education; but in a minor degree any one can convince himself of their utility, especially in our immediate subject of handling four-dimensional shapes. The sum total of the results obtained in the preceding pages can be compendiously and accurately expressed in nine words of the Space Language.
Their full potential can only be recognized if they are introduced early in education; however, anyone can still see their usefulness, especially when dealing with four-dimensional shapes. The total results achieved in the previous pages can be concisely and accurately summed up in nine words of the Space Language.
In one of Plato’s dialogues Socrates makes an experiment on a slave boy standing by. He makes certain[Pg 250] perceptions of space awake in the mind of Meno’s slave by directing his close attention on some simple facts of geometry.
In one of Plato’s dialogues, Socrates conducts an experiment on a nearby slave boy. He evokes certain[Pg 250] perceptions of space in Meno’s slave by focusing his attention on some basic facts of geometry.
By means of a few words and some simple forms we can repeat Plato’s experiment on new ground.
With just a few words and some basic structures, we can recreate Plato’s experiment in a new context.
Do we by directing our close attention on the facts of four dimensions awaken a latent faculty in ourselves? The old experiment of Plato’s, it seems to me, has come down to us as novel as on the day he incepted it, and its significance not better understood through all the discussion of which it has been the subject.
Do we awaken a hidden ability in ourselves by focusing closely on the facts of four dimensions? Plato's old experiment still feels as new to me as the day he first introduced it, and its importance hasn't been grasped any better despite all the discussions it has sparked.
Imagine a voiceless people living in a region where everything had a velvety surface, and who were thus deprived of all opportunity of experiencing what sound is. They could observe the slow pulsations of the air caused by their movements, and arguing from analogy, they would no doubt infer that more rapid vibrations were possible. From the theoretical side they could determine all about these more rapid vibrations. They merely differ, they would say, from slower ones, by the number that occur in a given time; there is a merely formal difference.
Imagine people without a voice living in a place where everything felt soft and smooth, leaving them unable to understand what sound is. They could see the slow movements of air caused by their actions and would probably guess that faster vibrations were possible. From a theoretical perspective, they could explain all about these quicker vibrations. They would simply argue that they differ from slower ones only by the number that happen in a specific time; it’s just a formal difference.
But suppose they were to take the trouble, go to the pains of producing these more rapid vibrations, then a totally new sensation would fall on their rudimentary ears. Probably at first they would only be dimly conscious of Sound, but even from the first they would become aware that a merely formal difference, a mere difference in point of number in this particular respect, made a great difference practically, as related to them. And to us the difference between three and four dimensions is merely formal, numerical. We can tell formally all about four dimensions, calculate the relations that would exist. But that the difference is merely formal does not prove that it is a futile and empty task, to present to ourselves as closely as we can the phenomena of four dimensions. In our formal[Pg 251] knowledge of it, the whole question of its actual relation to us, as we are, is left in abeyance.
But imagine if they took the time and effort to create these faster vibrations; a completely new sensation would reach their basic ears. At first, they might only have a vague awareness of Sound, but from the beginning, they would realize that a mere formal difference—a simple numerical variation in this specific aspect—would have significant practical implications for them. For us, the difference between three and four dimensions is purely formal and numerical. We can describe four dimensions in a formal way and calculate the relationships that would exist. However, just because the difference is only formal doesn't mean it's pointless to try to understand the phenomena of four dimensions as closely as possible. In our formal knowledge of it, the entire issue of how it actually relates to us, as we currently are, remains unresolved.
Possibly a new apprehension of nature may come to us through the practical, as distinguished from the mathematical and formal, study of four dimensions. As a child handles and examines the objects with which he comes in contact, so we can mentally handle and examine four-dimensional objects. The point to be determined is this. Do we find something cognate and natural to our faculties, or are we merely building up an artificial presentation of a scheme only formally possible, conceivable, but which has no real connection with any existing or possible experience?
Possibly, a new understanding of nature may come to us through the practical, as opposed to the mathematical and formal, study of four dimensions. Just as a child handles and explores the objects around them, we can mentally handle and examine four-dimensional objects. The key question is this: Do we discover something related and natural to our abilities, or are we simply creating an artificial representation of a scheme that is only theoretically possible and conceivable, but has no real connection to any existing or conceivable experience?
This, it seems to me, is a question which can only be settled by actually trying. This practical attempt is the logical and direct continuation of the experiment Plato devised in the “Meno.”
This, it seems to me, is a question that can only be resolved by actually trying it out. This practical attempt is the logical and direct next step of the experiment Plato created in the “Meno.”
Why do we think true? Why, by our processes of thought, can we predict what will happen, and correctly conjecture the constitution of the things around us? This is a problem which every modern philosopher has considered, and of which Descartes, Leibnitz, Kant, to name a few, have given memorable solutions. Plato was the first to suggest it. And as he had the unique position of being the first devisor of the problem, so his solution is the most unique. Later philosophers have talked about consciousness and its laws, sensations, categories. But Plato never used such words. Consciousness apart from a conscious being meant nothing to him. His was always an objective search. He made man’s intuitions the basis of a new kind of natural history.
Why do we think accurately? How is it that through our thought processes, we can predict what will happen and accurately guess the nature of the things around us? This is a question that every modern philosopher has tackled, with notable thinkers like Descartes, Leibnitz, and Kant offering memorable answers. Plato was the first to raise this issue. And since he was the original creator of the problem, his answer is the most original. Later philosophers have discussed consciousness and its principles, sensations, and categories. But Plato never used these terms. For him, consciousness without a conscious being was meaningless. His approach was always an objective quest. He based humanity's intuitions on a new kind of natural history.
In a few simple words Plato puts us in an attitude with regard to psychic phenomena—the mind—the ego—“what we are,” which is analogous to the attitude scientific men of the present day have with regard to the phenomena[Pg 252] of outward nature. Behind this first apprehension of ours of nature, there is an infinite depth to be learned and known. Plato said that behind the phenomena of mind that Meno’s slave boy exhibited, there was a vast, an infinite perspective. And his singularity, his originality, comes out most strongly marked in this, that the perspective, the complex phenomena beyond were, according to him, phenomena of personal experience. A footprint in the sand means a man to a being that has the conception of a man. But to a creature that has no such conception, it means a curious mark, somehow resulting from the concatenation of ordinary occurrences. Such a being would attempt merely to explain how causes known to him could so coincide as to produce such a result; he would not recognise its significance.
In just a few simple words, Plato sets our mindset toward psychic phenomena—the mind—the ego—“who we are”—which is similar to how today's scientists view the phenomena of the external world. Behind our initial understanding of nature, there’s an infinite depth to explore and comprehend. Plato said that behind the mental phenomena exhibited by Meno’s slave boy, there was a vast, limitless perspective. His uniqueness shines most clearly in the idea that this perspective, the complex phenomena beneath the surface, were, in his view, aspects of personal experience. A footprint in the sand signifies a person to someone who understands the concept of a person. But to a being that lacks that understanding, it appears merely as a strange mark resulting from the usual course of events. Such a being would only try to explain how the known causes could come together to create that result; they wouldn’t recognize its significance.[Pg 252]
Plato introduced the conception which made a new kind of natural history possible. He said that Meno’s slave boy thought true about things he had never learned, because his “soul” had experience. I know this will sound absurd to some people, and it flies straight in the face of the maxim, that explanation consists in showing how an effect depends on simple causes. But what a mistaken maxim that is! Can any single instance be shown of a simple cause? Take the behaviour of spheres for instance; say those ivory spheres, billiard balls, for example. We can explain their behaviour by supposing they are homogeneous elastic solids. We can give formulæ which will account for their movements in every variety. But are they homogeneous elastic solids? No, certainly not. They are complex in physical and molecular structure, and atoms and ions beyond open an endless vista. Our simple explanation is false, false as it can be. The balls act as if they were homogeneous elastic spheres. There is a statistical simplicity in the resultant of very complex conditions, which makes that artificial conception useful.[Pg 253] But its usefulness must not blind us to the fact that it is artificial. If we really look deep into nature, we find a much greater complexity than we at first suspect. And so behind this simple “I,” this myself, is there not a parallel complexity? Plato’s “soul” would be quite acceptable to a large class of thinkers, if by “soul” and the complexity he attributes to it, he meant the product of a long course of evolutionary changes, whereby simple forms of living matter endowed with rudimentary sensation had gradually developed into fully conscious beings.
Plato introduced an idea that made a new type of natural history possible. He argued that Meno’s slave boy thought correctly about things he had never learned because his “soul” had experience. I know this might sound ridiculous to some, and it contradicts the idea that explanation is about showing how an effect comes from simple causes. But that idea is misguided! Can anyone show a single example of a simple cause? Take the behavior of spheres, like ivory spheres or billiard balls, for instance. We can explain their behavior by assuming they are homogeneous elastic solids. We can provide formulas that will explain their movements in every situation. But are they homogeneous elastic solids? No, definitely not. They are complex in both physical and molecular structure, and atoms and ions open an endless array of possibilities. Our simple explanation is completely wrong. The balls behave as if they are homogeneous elastic spheres. There’s a statistical simplicity in the result of very complex conditions that makes that simplified idea useful. But its usefulness shouldn't blind us to the fact that it’s an artificial concept. If we examine nature closely, we discover a much greater complexity than we initially suspect. So, behind this simple “I,” or myself, is there not a similar complexity? Plato’s “soul” would be acceptable to many thinkers if by “soul” and the complexity he attributes to it, he referred to the outcome of a long series of evolutionary changes in which simple forms of living matter with basic sensations gradually developed into fully conscious beings.[Pg 253]
But Plato does not mean by “soul” a being of such a kind. His soul is a being whose faculties are clogged by its bodily environment, or at least hampered by the difficulty of directing its bodily frame—a being which is essentially higher than the account it gives of itself through its organs. At the same time Plato’s soul is not incorporeal. It is a real being with a real experience. The question of whether Plato had the conception of non-spatial existence has been much discussed. The verdict is, I believe, that even his “ideas” were conceived by him as beings in space, or, as we should say, real. Plato’s attitude is that of Science, inasmuch as he thinks of a world in Space. But, granting this, it cannot be denied that there is a fundamental divergence between Plato’s conception and the evolutionary theory, and also an absolute divergence between his conception and the genetic account of the origin of the human faculties. The functions and capacities of Plato’s “soul” are not derived by the interaction of the body and its environment.
But Plato doesn’t mean “soul” in that way. His soul is a being whose abilities are constrained by its physical surroundings, or at least limited by the difficulty of managing its body—a being that is fundamentally greater than the way it describes itself through its physical organs. At the same time, Plato’s soul is not immaterial. It is a real being with real experiences. The discussion about whether Plato understood non-spatial existence has been extensive. The general opinion seems to be that even his “ideas” were seen by him as entities in space, or, as we would say, real. Plato’s perspective aligns with that of Science, as he envisions a world in Space. However, even accepting this, it cannot be ignored that there is a key difference between Plato’s view and the evolutionary theory, as well as an absolute difference between his view and the genetic explanation of how human abilities originated. The functions and capacities of Plato’s “soul” do not arise from the interaction between the body and its surroundings.
Plato was engaged on a variety of problems, and his religious and ethical thoughts were so keen and fertile that the experimental investigation of his soul appears involved with many other motives. In one passage Plato will combine matter of thought of all kinds and from all sources, overlapping, interrunning. And in no case is he[Pg 254] more involved and rich than in this question of the soul. In fact, I wish there were two words, one denoting that being, corporeal and real, but with higher faculties than we manifest in our bodily actions, which is to be taken as the subject of experimental investigation; and the other word denoting “soul” in the sense in which it is made the recipient and the promise of so much that men desire. It is the soul in the former sense that I wish to investigate, and in a limited sphere only. I wish to find out, in continuation of the experiment in the Meno, what the “soul” in us thinks about extension, experimenting on the grounds laid down by Plato. He made, to state the matter briefly, the hypothesis with regard to the thinking power of a being in us, a “soul.” This soul is not accessible to observation by sight or touch, but it can be observed by its functions; it is the object of a new kind of natural history, the materials for constructing which lie in what it is natural to us to think. With Plato “thought” was a very wide-reaching term, but still I would claim in his general plan of procedure a place for the particular question of extension.
Plato was focused on a variety of issues, and his religious and ethical ideas were so insightful and rich that exploring his soul seems linked to many other motivations. In one instance, Plato blends thoughts of all types and from all sources, intertwining them. He is never more complex and profound than when addressing the question of the soul. Honestly, I wish there were two terms: one to describe that being, physical and real, but with higher abilities than we show in our physical actions, which would serve as the basis for experimental investigation; and the other term to refer to “soul” in the sense of it being the holder and the hope of so much that people desire. It’s the soul in the first sense that I want to explore, and only within a limited scope. I want to discover, following up on the experiment in the Meno, what the “soul” within us understands about extension, testing the principles laid out by Plato. He proposed, to put it briefly, the idea regarding the thinking ability of a being within us, a “soul.” This soul isn’t observable through sight or touch, but it can be recognized by its functions; it represents a new type of natural history that can be constructed from what it’s natural for us to think. For Plato, “thought” was a very broad term, but I still believe there's a place in his overall approach for the specific question of extension.
The problem comes to be, “What is it natural to us to think about matter qua extended?”
The question that arises is, “What do we naturally think about matter qua extended?”
First of all, I find that the ordinary intuition of any simple object is extremely imperfect. Take a block of differently marked cubes, for instance, and become acquainted with them in their positions. You may think you know them quite well, but when you turn them round—rotate the block round a diagonal, for instance—you will find that you have lost track of the individuals in their new positions. You can mentally construct the block in its new position, by a rule, by taking the remembered sequences, but you don’t know it intuitively. By observation of a block of cubes in various positions, and very expeditiously by a use of Space names applied to the[Pg 255] cubes in their different presentations, it is possible to get an intuitive knowledge of the block of cubes, which is not disturbed by any displacement. Now, with regard to this intuition, we moderns would say that I had formed it by my tactual visual experiences (aided by hereditary pre-disposition). Plato would say that the soul had been stimulated to recognise an instance of shape which it knew. Plato would consider the operation of learning merely as a stimulus; we as completely accounting for the result. The latter is the more common-sense view. But, on the other hand, it presupposes the generation of experience from physical changes. The world of sentient experience, according to the modern view, is closed and limited; only the physical world is ample and large and of ever-to-be-discovered complexity. Plato’s world of soul, on the other hand, is at least as large and ample as the world of things.
First of all, I think that our basic understanding of any simple object is really imperfect. Take a block of different marked cubes, for example, and get familiar with them in their initial positions. You might believe you know them well, but when you rotate the block around a diagonal, for instance, you’ll realize that you’ve lost track of the individual cubes in their new places. You can visualize the block in its new position by following a rule, recalling the sequences you remembered, but you don’t truly understand it intuitively. By observing a block of cubes in different positions, and quickly using spatial names assigned to the cubes in their various displays, you can develop an intuitive grasp of the block of cubes that isn’t affected by any shifts. Now, regarding this intuition, we modern thinkers would say that I formed it through my tactile and visual experiences (supported by genetic predisposition). Plato would argue that the soul has been prompted to recognize a shape it already knew. Plato would view the learning process merely as a stimulus; we would see it as a complete explanation for the outcome. The latter perspective is more grounded in common sense. However, it also assumes that experiences arise from physical changes. According to the modern view, the realm of sentient experience is closed and limited; only the physical world is vast, complex, and ever-evolving. In contrast, Plato’s world of the soul is at least as expansive and rich as the world of tangible things.
Let us now try a crucial experiment. Can I form an intuition of a four-dimensional object? Such an object is not given in the physical range of my sense contacts. All I can do is to present to myself the sequences of solids, which would mean the presentation to me under my conditions of a four-dimensional object. All I can do is to visualise and tactualise different series of solids which are alternative sets of sectional views of a four-dimensional shape.
Let’s try an important experiment. Can I imagine a four-dimensional object? I can’t perceive such an object through my senses. All I can do is think about the sequences of solids, which would represent a four-dimensional object in my terms. I can only visualize and feel different series of solids that are alternative sets of cross-sections of a four-dimensional shape.
If now, on presenting these sequences, I find a power in me of intuitively passing from one of these sets of sequences to another, of, being given one, intuitively constructing another, not using a rule, but directly apprehending it, then I have found a new fact about my soul, that it has a four-dimensional experience; I have observed it by a function it has.
If now, as I present these sequences, I realize that I can intuitively move from one set of sequences to another, and that, when given one, I can intuitively create another without following a rule but by directly understanding it, then I've discovered something new about my soul: it has a four-dimensional experience; I've observed this through a function it possesses.
I do not like to speak positively, for I might occasion a loss of time on the part of others, if, as may very well[Pg 256] be, I am mistaken. But for my own part, I think there are indications of such an intuition; from the results of my experiments, I adopt the hypothesis that that which thinks in us has an ample experience, of which the intuitions we use in dealing with the world of real objects are a part; of which experience, the intuition of four-dimensional forms and motions is also a part. The process we are engaged in intellectually is the reading the obscure signals of our nerves into a world of reality, by means of intuitions derived from the inner experience.
I prefer not to speak positively because I might waste other people's time if I'm mistaken, which is entirely possible. However, I believe there are signs of such intuition; based on my experiments, I propose that what thinks within us has a broad experience, of which the intuitions we use to interact with the real world are just one part. This experience also includes the intuition of four-dimensional forms and motions. The intellectual process we're engaged in involves interpreting the vague signals from our nerves into a reality, using intuitions that come from our inner experiences.
The image I form is as follows. Imagine the captain of a modern battle-ship directing its course. He has his charts before him; he is in communication with his associates and subordinates; can convey his messages and commands to every part of the ship, and receive information from the conning-tower and the engine-room. Now suppose the captain immersed in the problem of the navigation of his ship over the ocean, to have so absorbed himself in the problem of the direction of his craft over the plane surface of the sea that he forgets himself. All that occupies his attention is the kind of movement that his ship makes. The operations by which that movement is produced have sunk below the threshold of his consciousness, his own actions, by which he pushes the buttons, gives the orders, are so familiar as to be automatic, his mind is on the motion of the ship as a whole. In such a case we can imagine that he identifies himself with his ship; all that enters his conscious thought is the direction of its movement over the plane surface of the ocean.
The image I have in mind is this: Picture the captain of a modern battleship steering its course. He has his charts laid out in front of him; he's in touch with his team and crew; he can send messages and commands to every part of the ship and get updates from the control room and engine room. Now, imagine the captain so focused on navigating his ship across the ocean that he becomes completely absorbed in the task, forgetting everything around him. His entire focus is on how the ship is moving. The processes that create that movement have become secondary to his awareness; his actions, like pushing buttons and giving orders, are so familiar they happen automatically. His mind is solely on the ship’s overall motion. In that moment, we can picture him feeling like he is one with his ship; the only thing in his conscious thought is the direction it's moving over the flat surface of the ocean.
Such is the relation, as I imagine it, of the soul to the body. A relation which we can imagine as existing momentarily in the case of the captain is the normal one in the case of the soul with its craft. As the captain is capable of a kind of movement, an amplitude of motion, which does not enter into his thoughts with regard to the[Pg 257] directing the ship over the plane surface of the ocean, so the soul is capable of a kind of movement, has an amplitude of motion, which is not used in its task of directing the body in the three-dimensional region in which the body’s activity lies. If for any reason it became necessary for the captain to consider three-dimensional motions with regard to his ship, it would not be difficult for him to gain the materials for thinking about such motions; all he has to do is to call his own intimate experience into play. As far as the navigation of the ship, however, is concerned, he is not obliged to call on such experience. The ship as a whole simply moves on a surface. The problem of three-dimensional movement does not ordinarily concern its steering. And thus with regard to ourselves all those movements and activities which characterise our bodily organs are three-dimensional; we never need to consider the ampler movements. But we do more than use the movements of our body to effect our aims by direct means; we have now come to the pass when we act indirectly on nature, when we call processes into play which lie beyond the reach of any explanation we can give by the kind of thought which has been sufficient for the steering of our craft as a whole. When we come to the problem of what goes on in the minute, and apply ourselves to the mechanism of the minute, we find our habitual conceptions inadequate.
This is how I see the relationship between the soul and the body. What we can imagine as a temporary relationship for the captain is actually how the soul interacts with its body. Just like the captain has a kind of movement and range of motion that doesn’t concern him when he's directing the ship across the flat surface of the ocean, the soul also has its own movement and range that isn't utilized when guiding the body through the three-dimensional space it operates in. If the captain needed to think about three-dimensional movements concerning his ship, he could easily draw from his own experiences. However, when it comes to navigating the ship, he doesn’t have to rely on that experience. The ship simply travels on a surface. Generally, the issue of three-dimensional movement doesn't factor into steering. Similarly, all the movements and functions of our body are three-dimensional; we don’t usually need to consider the broader movements. However, we've reached a point where we interact with nature indirectly, initiating processes that go beyond any explanations we can provide using the types of thinking that were sufficient for guiding our body as a whole. When we explore what happens at a microscopic level and focus on its mechanisms, we find our usual understanding falls short.
The captain in us must wake up to his own intimate nature, realise those functions of movement which are his own, and in virtue of his knowledge of them apprehend how to deal with the problems he has come to.
The captain in us needs to awaken to his own true nature, understand the ways he moves that are unique to him, and based on this understanding, figure out how to handle the challenges he faces.
Think of the history of man. When has there been a time, in which his thoughts of form and movement were not exclusively of such varieties as were adapted for his bodily performance? We have never had a demand to conceive what our own most intimate powers are. But,[Pg 258] just as little as by immersing himself in the steering of his ship over the plane surface of the ocean, a captain can lose the faculty of thinking about what he actually does, so little can the soul lose its own nature. It can be roused to an intuition that is not derived from the experience which the senses give. All that is necessary is to present some few of those appearances which, while inconsistent with three-dimensional matter, are yet consistent with our formal knowledge of four-dimensional matter, in order for the soul to wake up and not begin to learn, but of its own intimate feeling fill up the gaps in the presentiment, grasp the full orb of possibilities from the isolated points presented to it. In relation to this question of our perceptions, let me suggest another illustration, not taking it too seriously, only propounding it to exhibit the possibilities in a broad and general way.
Think about human history. Has there ever been a time when our thoughts about form and movement were not solely about how they related to our physical actions? We have never needed to explore what our deepest abilities really are. But, just as a captain steering a ship across a flat ocean surface can still think about what he’s really doing, the soul can't lose its own nature. It can be awakened to an understanding that doesn’t come from sensory experiences. All it takes is to present a few of those appearances that, while not matching three-dimensional matter, align with our understanding of four-dimensional matter, for the soul to awaken and, instead of starting to learn, instinctively fill in the gaps in its awareness, capturing the full range of possibilities from the isolated points shown to it. Regarding this issue of our perceptions, let me propose another illustration, not meant to be taken too seriously, but just to demonstrate the possibilities in a broad way.
In the heavens, amongst the multitude of stars, there are some which, when the telescope is directed on them, seem not to be single stars, but to be split up into two. Regarding these twin stars through a spectroscope, an astronomer sees in each a spectrum of bands of colour and black lines. Comparing these spectrums with one another, he finds that there is a slight relative shifting of the dark lines, and from that shifting he knows that the stars are rotating round one another, and can tell their relative velocity with regard to the earth. By means of his terrestrial physics he reads this signal of the skies. This shifting of lines, the mere slight variation of a black line in a spectrum, is very unlike that which the astronomer knows it means. But it is probably much more like what it means than the signals which the nerves deliver are like the phenomena of the outer world.
In the sky, among the countless stars, some appear not as single stars when viewed through a telescope, but seem to be split into two. When an astronomer looks at these binary stars through a spectroscope, he observes a spectrum of colored bands and dark lines in each one. By comparing these spectra, he notices a slight shift in the dark lines, which tells him that the stars are orbiting each other, allowing him to calculate their relative speed in relation to Earth. Using his knowledge of physics, he interprets this message from the heavens. This shift in lines, the minor variation of a black line in a spectrum, is very different from what the astronomer understands it signifies. Yet, it likely resembles its meaning much more closely than the signals sent by our nerves are similar to the actual phenomena of the external world.
No picture of an object is conveyed through the nerves. No picture of motion, in the sense in which we postulate its existence, is conveyed through the nerves. The actual[Pg 259] deliverances of which our consciousness takes account are probably identical for eye and ear, sight and touch.
No image of an object is transmitted through the nerves. No image of motion, in the way we assume it exists, is transmitted through the nerves. The actual[Pg 259] information that our awareness considers is likely the same for both sight and hearing, vision and touch.
If for a moment I take the whole earth together and regard it as a sentient being, I find that the problem of its apprehension is a very complex one, and involves a long series of personal and physical events. Similarly the problem of our apprehension is a very complex one. I only use this illustration to exhibit my meaning. It has this especial merit, that, as the process of conscious apprehension takes place in our case in the minute, so, with regard to this earth being, the corresponding process takes place in what is relatively to it very minute.
If I take a moment to consider the entire earth as if it were a conscious being, I realize that understanding it is a really complicated issue that involves many personal and physical events. The way we understand things is also very complex. I use this example to clarify my point. It has the specific advantage that, just as our conscious understanding happens in small increments, the similar process for this earth-being happens in what is, relatively speaking, an even smaller scale.
Now, Plato’s view of a soul leads us to the hypothesis that that which we designate as an act of apprehension may be a very complex event, both physically and personally. He does not seek to explain what an intuition is; he makes it a basis from whence he sets out on a voyage of discovery. Knowledge means knowledge; he puts conscious being to account for conscious being. He makes an hypothesis of the kind that is so fertile in physical science—an hypothesis making no claim to finality, which marks out a vista of possible determination behind determination, like the hypothesis of space itself, the type of serviceable hypotheses.
Now, Plato’s perspective on the soul leads us to the idea that what we call an act of understanding might actually be a very complex event, both physically and personally. He doesn't try to define what intuition is; instead, he uses it as a starting point for a journey of discovery. Knowledge means knowledge; he holds conscious beings accountable for their consciousness. He proposes a hypothesis similar to those that are so beneficial in physical science—a hypothesis that doesn’t claim to be the final answer but opens up a view of potential understanding beyond what is already known, much like the concept of space itself, which serves as a useful type of hypothesis.
And, above all, Plato’s hypothesis is conducive to experiment. He gives the perspective in which real objects can be determined; and, in our present enquiry, we are making the simplest of all possible experiments—we are enquiring what it is natural to the soul to think of matter as extended.
And most importantly, Plato's theory encourages experimentation. He provides the viewpoint from which we can understand real objects, and in our current investigation, we are conducting the most basic experiment of all—we are exploring what it’s natural for the soul to consider matter as having extension.
Aristotle says we always use a “phantasm” in thinking, a phantasm of our corporeal senses a visualisation or a tactualisation. But we can so modify that visualisation or tactualisation that it represents something not known by the senses. Do we by that representation wake up an[Pg 260] intuition of the soul? Can we by the presentation of these hypothetical forms, that are the subject of our present discussion, wake ourselves up to higher intuitions? And can we explain the world around by a motion that we only know by our souls?
Aristotle says that we always rely on a “phantasm” when we think, which comes from our physical senses—like a visualization or a tactile experience. However, we can adjust that visualization or tactile experience so that it represents something we can't know through our senses. Does this representation awaken an[Pg 260] intuition of the soul? Can we, by presenting these hypothetical forms that we're discussing now, awaken ourselves to deeper intuitions? And can we explain the world around us through a motion that we understand only through our souls?
Apart from all speculation, however, it seems to me that the interest of these four-dimensional shapes and motions is sufficient reason for studying them, and that they are the way by which we can grow into a fuller apprehension of the world as a concrete whole.
Aside from all the speculation, it seems to me that the interest in these four-dimensional shapes and motions is a good enough reason to study them, and that they are the means by which we can develop a deeper understanding of the world as a complete entity.
Space Names.
If the words written in the squares drawn in fig. 1 are used as the names of the squares in the positions in which they are placed, it is evident that a combination of these names will denote a figure composed of the designated squares. It is found to be most convenient to take as the initial square that marked with an asterisk, so that the directions of progression are towards the observer and to his right. The directions of progression, however, are arbitrary, and can be chosen at will.
If the words written in the squares shown in fig. 1 are used as the names of the squares based on their positions, it's clear that a combination of these names will describe a figure made up of the specified squares. It's most convenient to start with the square marked with an asterisk, so that the directions of movement are toward the observer and to their right. However, the directions of movement are flexible and can be chosen freely.

Thus et, at, it, an, al will denote a figure in the form of a cross composed of five squares.
Thus et, at, it, an, al will represent a shape in the form of a cross made up of five squares.
Here, by means of the double sequence, e, a, i and n, t, l, it is possible to name a limited collection of space elements.
Here, using the double sequence, e, a, i and n, t, l, it's possible to identify a specific set of space elements.
The system can obviously be extended by using letter sequences of more members.
The system can clearly be expanded by using letter sequences with more characters.
But, without introducing such a complexity, the principles of a space language can be exhibited, and a nomenclature obtained adequate to all the considerations of the preceding pages.
But without adding such complexity, the principles of a space language can be presented, and a naming system can be created that is sufficient for all the points discussed in the previous pages.
[Pg 261]
[Pg 261]
1. Extension.
Extension.

Call the large squares in 2 by the name written in them. It is evident that each can be divided as shown in fig. 1. Then the small square marked 1 will be “en” in “En,” or “Enen.” The square marked 2 will be “et” in “En” or “Enet,” while the square marked 4 will be “en” in “Et” or “Eten.” Thus the square 5 will be called “Ilil.”
Call the large squares in 2 by the name written on them. It's clear that each can be divided as shown in fig. 1. Then the small square marked 1 will be "en" in "En," or "Enen." The square marked 2 will be "et" in "En" or "Enet," while the square marked 4 will be "en" in "Et" or "Eten." So, the square 5 will be called "Ilil."
This principle of extension can be applied in any number of dimensions.
This principle of extension can be used in many different dimensions.
2. Application to Three-Dimensional Space.
2. Application to 3D Space.

To name a three-dimensional collocation of cubes take the upward direction first, secondly the direction towards the observer, thirdly the direction to his right hand.
To name a three-dimensional arrangement of cubes, start with the upward direction, then the direction toward the observer, and finally the direction to their right.
These form a word in which the first letter gives the place of the cube upwards, the second letter its place towards the observer, the third letter its place to the right.
These create a word where the first letter indicates the cube's position above, the second letter shows its location towards the observer, and the third letter represents its position to the right.
We have thus the following scheme, which represents the set of cubes of column 1, fig. 101, page 165.
We have the following layout, which shows the collection of cubes from column 1, fig. 101, page 165.
We begin with the remote lowest cube at the left hand, where the asterisk is placed (this proves to be by far the most convenient origin to take for the normal system).
We start with the farthest lower cube on the left side, where the asterisk is located (this turns out to be the most convenient starting point for the standard system).
Thus “nen” is a “null” cube, “ten” a red cube on it, and “len” a “null” cube above “ten.”
Thus “nen” is a “null” cube, “ten” a red cube on it, and “len” a “null” cube above “ten.”
[Pg 262]
[Pg 262]
By using a more extended sequence of consonants and vowels a larger set of cubes can be named.
By using a longer combination of consonants and vowels, a bigger set of cubes can be named.
To name a four-dimensional block of tesseracts it is simply necessary to prefix an “e,” an “a,” or an “i” to the cube names.
To name a four-dimensional block of tesseracts, you just need to add an “e,” an “a,” or an “i” in front of the cube names.
Thus the tesseract blocks schematically represented on page 165, fig. 101 are named as follows:—
Thus the tesseract blocks shown on page 165, fig. 101 are named as follows:—
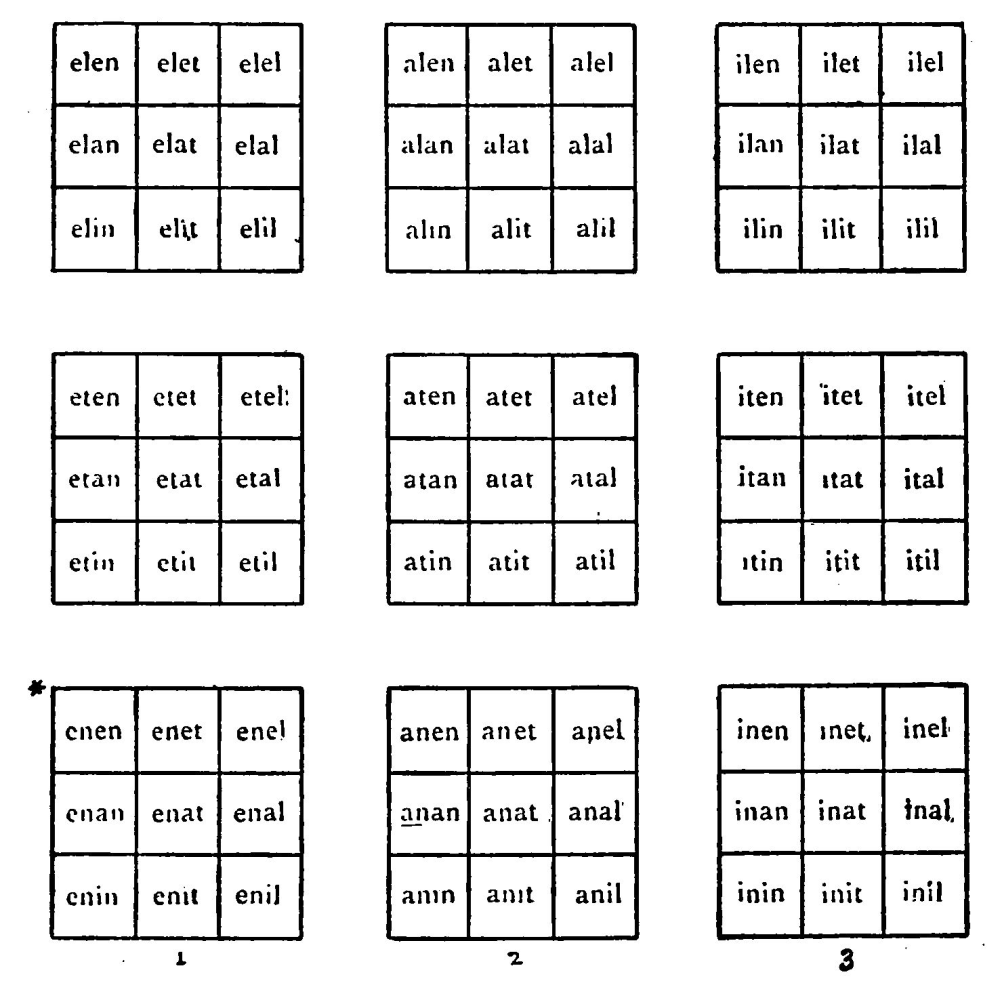
2. Derivation of Point, Line, Face, etc., Names.
2. How Names for Points, Lines, Faces, etc., Are Created.
The principle of derivation can be shown as follows: Taking the square of squares[Pg 263]
The principle of derivation can be shown like this: Taking the square of squares[Pg 263]

the number of squares in it can be enlarged and the whole kept the same size.
the number of squares in it can be increased while keeping the overall size the same.

Now use an initial “s” to denote the result of carrying this process on to a great extent, and we obtain the limit names, that is the point, line, area names for a square. “Sat” is the whole interior. The corners are “sen,” “sel,” “sin,” “sil,” while the lines are “san,” “sal,” “set,” “sit.”
Now use an initial “s” to denote the result of carrying this process on to a great extent, and we obtain the limit names, that is the point, line, area names for a square. “Sat” is the whole interior. The corners are “sen,” “sel,” “sin,” “sil,” while the lines are “san,” “sal,” “set,” “sit.”

I find that by the use of the initial “s” these names come to be practically entirely disconnected with the systematic names for the square from which they are derived. They are easy to learn, and when learned can be used readily with the axes running in any direction.
I’ve noticed that using the initial “s” makes these names almost completely separate from the systematic names for the square they come from. They’re easy to remember, and once you know them, you can easily use them with the axes in any direction.
To derive the limit names for a four-dimensional rectangular figure, like the tesseract, is a simple extension of this process. These point, line, etc., names include those which apply to a cube, as will be evident on inspection of the first cube of the diagrams which follow.
To come up with the limit names for a four-dimensional rectangular shape, like the tesseract, is just a straightforward extension of this process. The names for points, lines, and so on include those that apply to a cube, as you'll clearly see when you look at the first cube in the diagrams below.
All that is necessary is to place an “s” before each of the names given for a tesseract block. We then obtain apellatives which, like the colour names on page 174, fig. 103, apply to all the points, lines, faces, solids, and to[Pg 264] the hyper-solid of the tesseract. These names have the advantage over the colour marks that each point, line, etc., has its own individual name.
All you need to do is put an "s" in front of each name provided for a tesseract block. This gives us terms that, like the color names on page 174, fig. 103, apply to all points, lines, faces, solids, and to[Pg 264] the hyper-solid of the tesseract. These names are better than the color marks because each point, line, etc., has its own unique name.
In the diagrams I give the names corresponding to the positions shown in the coloured plate or described on p. 174. By comparing cubes 1, 2, 3 with the first row of cubes in the coloured plate, the systematic names of each of the points, lines, faces, etc., can be determined. The asterisk shows the origin from which the names run.
In the diagrams, I provide the names that correspond to the positions shown in the colored plate or described on p. 174. By comparing cubes 1, 2, and 3 with the first row of cubes in the colored plate, you can determine the systematic names of each point, line, face, etc. The asterisk indicates the origin from which the names are derived.
These point, line, face, etc., names should be used in connection with the corresponding colours. The names should call up coloured images of the parts named in their right connection.
These terms like point, line, face, etc., should be used along with the corresponding colors. The names should evoke colored images of the parts they refer to in their proper context.
It is found that a certain abbreviation adds vividness of distinction to these names. If the final “en” be dropped wherever it occurs the system is improved. Thus instead of “senen,” “seten,” “selen,” it is preferable to abbreviate to “sen,” “set,” “sel,” and also use “san,” “sin” for “sanen,” “sinen.”
It’s found that a certain abbreviation makes these names stand out more. If you drop the final “en” whenever it shows up, the system gets better. So instead of “senen,” “seten,” “selen,” it’s better to shorten them to “sen,” “set,” “sel,” and also use “san,” “sin” for “sanen,” “sinen.”

[Pg 265]
[Pg 265]


[Pg 266]
[Pg 266]

We can now name any section. Take e.g. the line in the first cube from senin to senel, we should call the line running from senin to senel, senin senat senel, a line light yellow in colour with null points.
We can now label any section. Take e.g. the line in the first cube from senin to senel; we should refer to the line running from senin to senel, senin senat senel, as a light yellow line with no points.
Here senat is the name for all of the line except its ends. Using “senat” in this way does not mean that the line is the whole of senat, but what there is of it is senat. It is a part of the senat region. Thus also the triangle, which has its three vertices in senin, senel, selen, is named thus:
Here, "senat" refers to the entire line except for its endpoints. Using "senat" like this doesn’t imply that the line is the entirety of senat, but rather that what exists of it is senat. It’s a part of the senat area. Similarly, the triangle, which has its three corners at senin, senel, and selen, is named accordingly:
- Area: setat.
- Sides: setan, senat, setet.
- Vertices: senin, senel, sel.
The tetrahedron section of the tesseract can be thought of as a series of plane sections in the successive sections of the tesseract shown in fig. 114, p. 191. In b0 the section [Pg 267]is the one written above. In b1 the section is made by a plane which cuts the three edges from sanen intermediate of their lengths and thus will be:
The tetrahedron section of the tesseract can be seen as a series of flat sections in the successive parts of the tesseract shown in fig. 114, p. 191. In b0, the section [Pg 267] is the one mentioned above. In b1, the section is formed by a plane that intersects the three edges at an equal point along their lengths, resulting in:
- Area: satat.
- Sides: satan, sanat, satet.
- Vertices: sanan, sanet, sat.
The sections in b2, b3 will be like the section in b1 but smaller.
The sections in b2 and b3 will be similar to the section in b1 but smaller.
Finally in b4 the section plane simply passes through the corner named sin.
Finally in b4, the section plane just goes through the corner called sin.
Hence, putting these sections together in their right relation, from the face setat, surrounded by the lines and points mentioned above, there run:
Hence, putting these sections together in their proper relationship, from the face set out, surrounded by the lines and points mentioned above, there run:
- 3 faces: satan, sanat, satet
- 3 lines: sanan, sanet, sat
and these faces and lines run to the point sin. Thus the tetrahedron is completely named.
and these faces and lines lead to the point of sin. So, the tetrahedron is fully defined.
The octahedron section of the tesseract, which can be traced from fig. 72, p. 129 by extending the lines there drawn, is named:
The octahedron part of the tesseract, which can be found in fig. 72, p. 129 by extending the lines shown there, is called:
Front triangle selin, selat, selel, setal, senil, setit, selin with area setat.
Front triangle selin, selat, selel, setal, senil, setit, selin with area setat.
The sections between the front and rear triangle, of which one is shown in 1b, another in 2b, are thus named, points and lines, salan, salat, salet, satet, satel, satal, sanal, sanat, sanit, satit, satin, satan, salan.
The sections between the front and rear triangle, with one shown in 1b and another in 2b, are called points and lines, salan, salat, salet, satet, satel, satal, sanal, sanat, sanit, satit, satin, satan, salan.
The rear triangle found in 3b by producing lines is sil, sitet, sinel, sinat, sinin, sitan, sil.
The rear triangle found in 3b by producing lines is sil, sitet, sinel, sinat, sinin, sitan, sil.
The assemblage of sections constitute the solid body of the octahedron satat with triangular faces. The one from the line selat to the point sil, for instance, is named[Pg 268] selin, selat, selel, salet, salat, salan, sil. The whole interior is salat.
The collection of sections makes up the solid form of the octahedron, which has triangular faces. The one from the line selat to the point sil, for example, is called[Pg 268] selin, selat, selel, salet, salat, salan, sil. The entire interior is salat.
Shapes can easily be cut out of cardboard which, when folded together, form not only the tetrahedron and the octahedron, but also samples of all the sections of the tesseract taken as it passes cornerwise through our space. To name and visualise with appropriate colours a series of these sections is an admirable exercise for obtaining familiarity with the subject.
Shapes can easily be cut out of cardboard that, when folded together, create not only the tetrahedron and the octahedron but also samples of all the sections of the tesseract as it passes cornerwise through our space. Naming and visualizing these sections with suitable colors is a great way to become familiar with the subject.
Connecting with Numbers.
By extending the letter sequence it is of course possible to name a larger field. By using the limit names the corners of each square can be named.
By extending the letter sequence, it's definitely possible to name a larger area. By using the limit names, the corners of each square can be identified.
Thus “en sen,” “an sen,” etc., will be the names of the points nearest the origin in “en” and in “an.”
Thus “en sen,” “an sen,” etc., will be the names of the points closest to the origin in “en” and in “an.”
A field of points of which each one is indefinitely small is given by the names written below.
A field of points, each one infinitely small, is represented by the names listed below.

The squares are shown in dotted lines, the names denote the points. These points are not mathematical points, but really minute areas.
The squares are shown with dotted lines, and the names indicate the points. These points aren't just mathematical points; they're actually tiny areas.
Instead of starting with a set of squares and naming them, we can start with a set of points.
Instead of beginning with a group of squares and labeling them, we can begin with a group of points.
By an easily remembered convention we can give names to such a region of points.
By a simple convention, we can assign names to this area of points.
[Pg 269]
[Pg 269]
Let the space names with a final “e” added denote the mathematical points at the corner of each square nearest the origin. We have then
Let the space names with a final “e” added refer to the mathematical points at the corner of each square closest to the origin. We have then

for the set of mathematical points indicated. This system is really completely independent of the area system and is connected with it merely for the purpose of facilitating the memory processes. The word “ene” is pronounced like “eny,” with just sufficient attention to the final vowel to distinguish it from the word “en.”
for the set of mathematical points indicated. This system is really completely independent of the area system and is connected with it only to help with memory processes. The word “ene” is pronounced like “eny,” with just enough attention to the final vowel to differentiate it from the word “en.”
Now, connecting the numbers 0, 1, 2 with the sequence e, a, i, and also with the sequence n, t, l, we have a set of points named as with numbers in a co-ordinate system. Thus “ene” is (0, 0) “ate” is (1, 1) “ite” is (2, 1). To pass to the area system the rule is that the name of the square is formed from the name of its point nearest to the origin by dropping the final e.
Now, connecting the numbers 0, 1, 2 with the sequences e, a, i, and n, t, l, we have a set of points labeled with numbers in a coordinate system. So “ene” is (0, 0), “ate” is (1, 1), and “ite” is (2, 1). To move to the area system, the rule is that the name of the square is derived from the name of its point closest to the origin by dropping the final e.
By using a notation analogous to the decimal system a larger field of points can be named. It remains to assign a letter sequence to the numbers from positive 0 to positive 9, and from negative 0 to negative 9, to obtain a system which can be used to denote both the usual co-ordinate system of mapping and a system of named squares. The names denoting the points all end with e. Those that denote squares end with a consonant.
By using a notation similar to the decimal system, we can name a broader range of points. Next, we need to assign a letter sequence to the numbers from positive 0 to positive 9, and from negative 0 to negative 9, to create a system that can represent both the usual coordinate mapping system and a system of named squares. The names for the points all end with an "e." The names for the squares end with a consonant.
There are many considerations which must be attended to in extending the sequences to be used, such as uniqueness in the meaning of the words formed, ease of pronunciation, avoidance of awkward combinations.
There are many factors to consider when expanding the sequences to be used, such as the uniqueness of the meanings of the words formed, how easy they are to pronounce, and avoiding awkward combinations.
[Pg 270]
[Pg 270]
I drop “s” altogether from the consonant series and short “u” from the vowel series. It is convenient to have unsignificant letters at disposal. A double consonant like “st” for instance can be referred to without giving it a local significance by calling it “ust.” I increase the number of vowels by considering a sound like “ra” to be a vowel, using, that is, the letter “r” as forming a compound vowel.
I completely remove the “s” from the consonant group and the short “u” from the vowel group. It’s helpful to have unimportant letters on hand. A double consonant like “st,” for example, can be referred to without assigning it any specific meaning by calling it “ust.” I also increase the number of vowels by treating a sound like “ra” as a vowel, meaning I use the letter “r” to create a combined vowel.
The series is as follows:—
The series is as follows:—
| Consonants. | ||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| positive | n | t | l | p | f | sh | k | ch | nt | st |
| negative | z | d | th | b | v | m | g | j | nd | sp |
| Vowels. | ||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| positive | e | a | i | ee | ae | ai | ar | ra | ri | ree |
| negative | er | o | oo | io | oe | iu | or | ro | roo | rio |
Pronunciation.—e as in men; a as in man; i as in in; ee as in between; ae as ay in may; ai as i in mine; ar as in art; er as ear in earth; o as in on; oo as oo in soon; io as in clarion; oe as oa in oat; iu pronounced like yew.
Pronunciation.—e as in men; a as in man; i as in in; ee as in between; ae as ay in may; ai as i in mine; ar as in art; er as ear in earth; o as in on; oo as in soon; io as in clarion; oe as in oat; iu pronounced like yew.
To name a point such as (23, 41) it is considered as (3, 1) on from (20, 40) and is called “ifeete.” It is the initial point of the square ifeet of the area system.
To name a point like (23, 41), it is seen as (3, 1) from (20, 40) and is referred to as “ifeete.” It serves as the starting point of the square ifeet in the area system.
The preceding amplification of a space language has been introduced merely for the sake of completeness. As has already been said nine words and their combinations, applied to a few simple models suffice for the purposes of our present enquiry.
The earlier expansion of a space language has been included just for the sake of completeness. As mentioned before, nine words and their combinations, applied to a few simple models, are enough for our current investigation.
Printed by Hazell, Watson & Viney, Ld., London and Aylesbury.
Printed by Hazell, Watson & Viney, Ltd., London and Aylesbury.
Download ePUB
If you like this ebook, consider a donation!